文章目录
- 四十六、Parallel Feature Pyramid Network
- 四十七、ScanSSD
- 四十七、RetinaMask
- 四十八、CornerNet-Saccade
- 四十九、CentripetalNet
- 五十、Fast Focal Detection Network
- 五十一、CornerNet-Squeeze
- 五十二、Paddle Anchor Free Network
- 五十三、Human Robot Interaction Pipeline
四十六、Parallel Feature Pyramid Network
四十七、ScanSSD
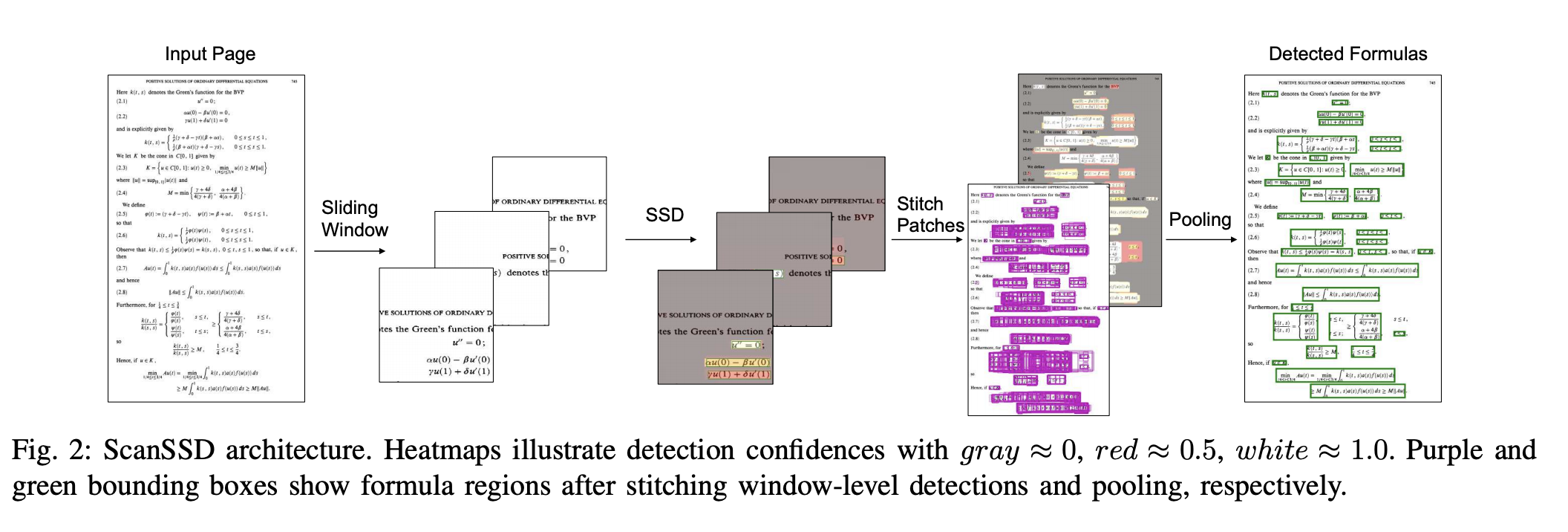
ScanSSD 是一种单次检测器 (SSD),用于定位偏离文本并嵌入文本行的数学公式。 它仅使用视觉特征进行检测:不使用布局、字体或字符标签等格式或排版信息。 给定 600 dpi 文档页面图像,单次检测器 (SSD) 使用滑动窗口在多个尺度上定位公式,然后汇集候选检测以获得页面级结果。
四十七、RetinaMask
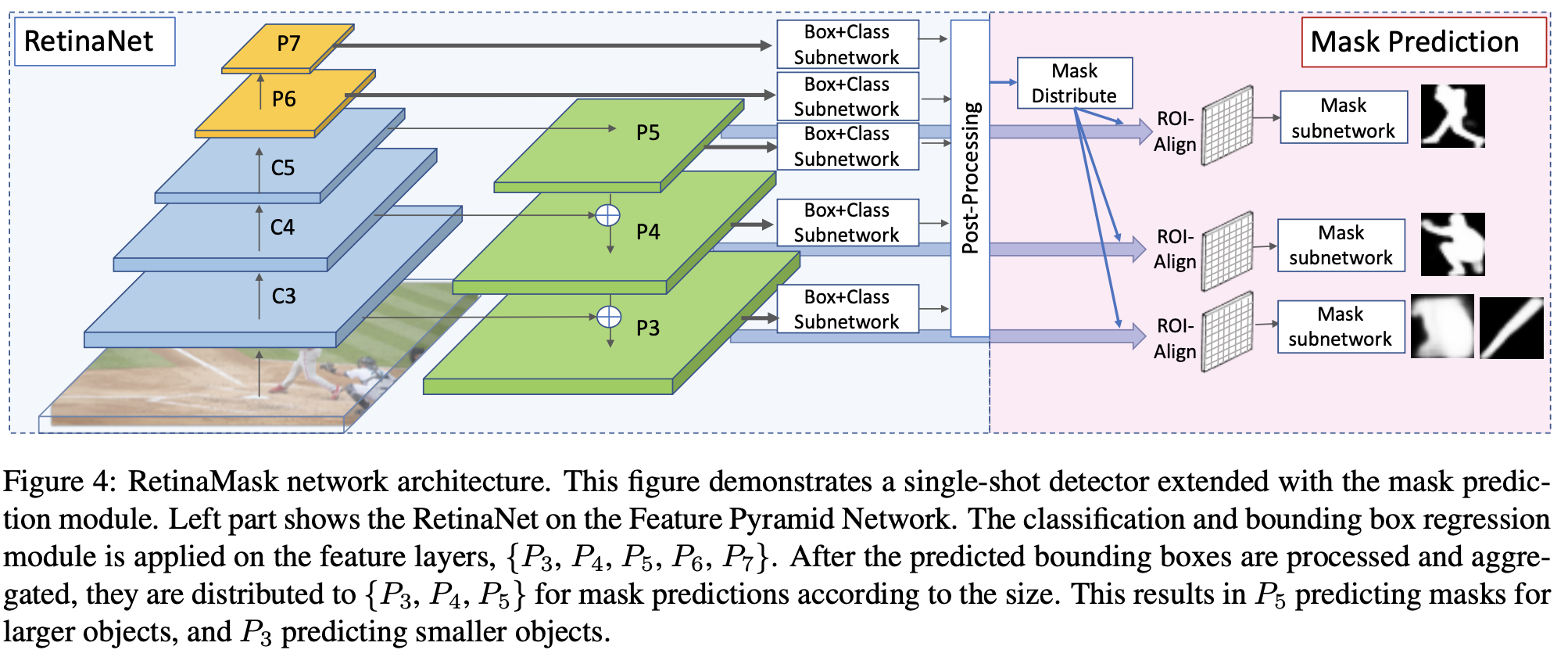
RetinaMask 是一种单阶段目标检测方法,通过在训练期间添加实例掩模预测任务以及提高训练期间参数选择鲁棒性的自适应损失来改进 RetinaNet,并在训练中包含更困难的示例。
四十八、CornerNet-Saccade
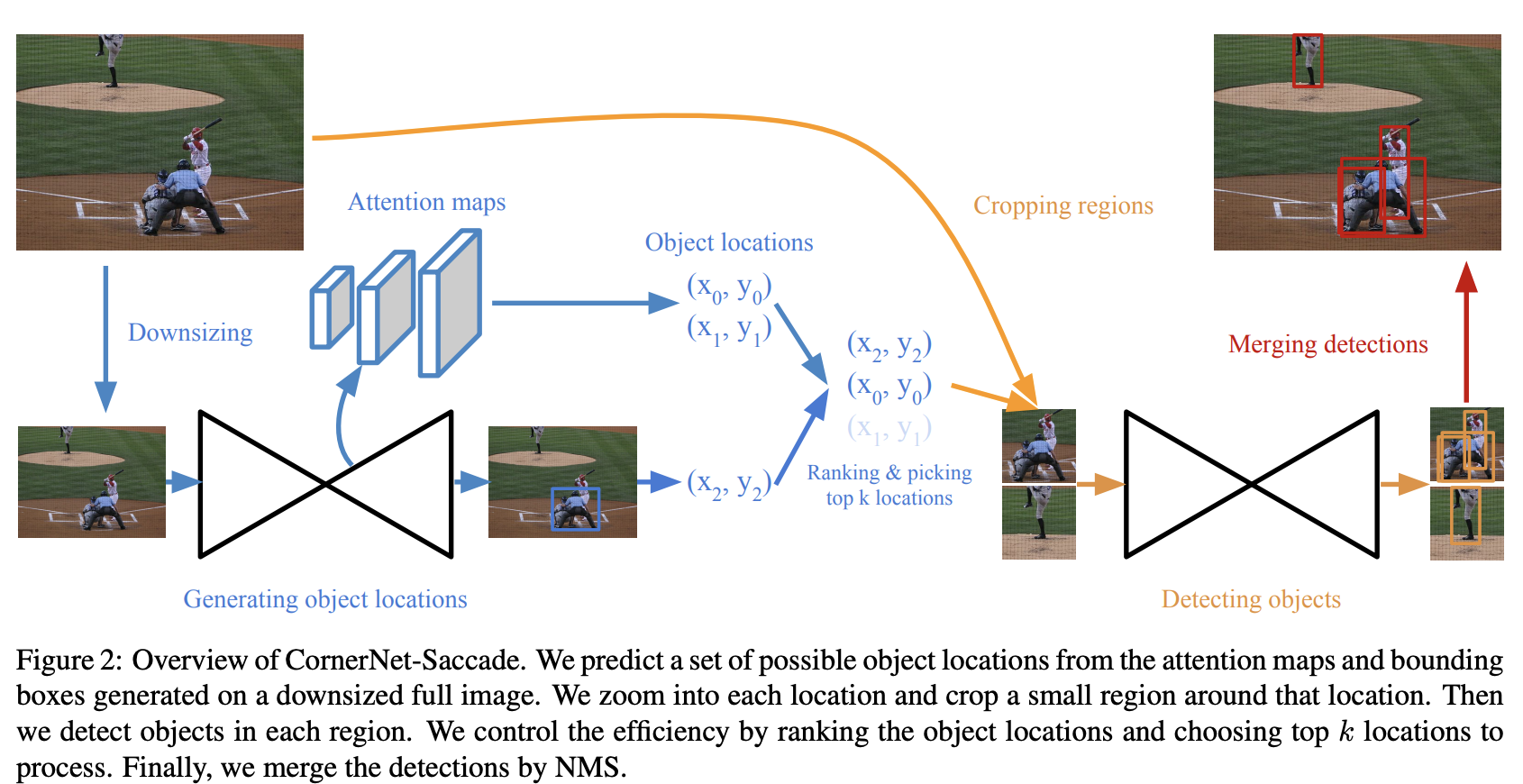
CornerNet-Saccade 是 CornerNet 的扩展,具有类似于人类视觉中的眼跳的注意力机制。 它从缩小的完整图像开始,生成注意力图,然后放大并由模型进一步处理。 这与原始 CornerNet 的不同之处在于它在多个尺度上完全卷积应用。
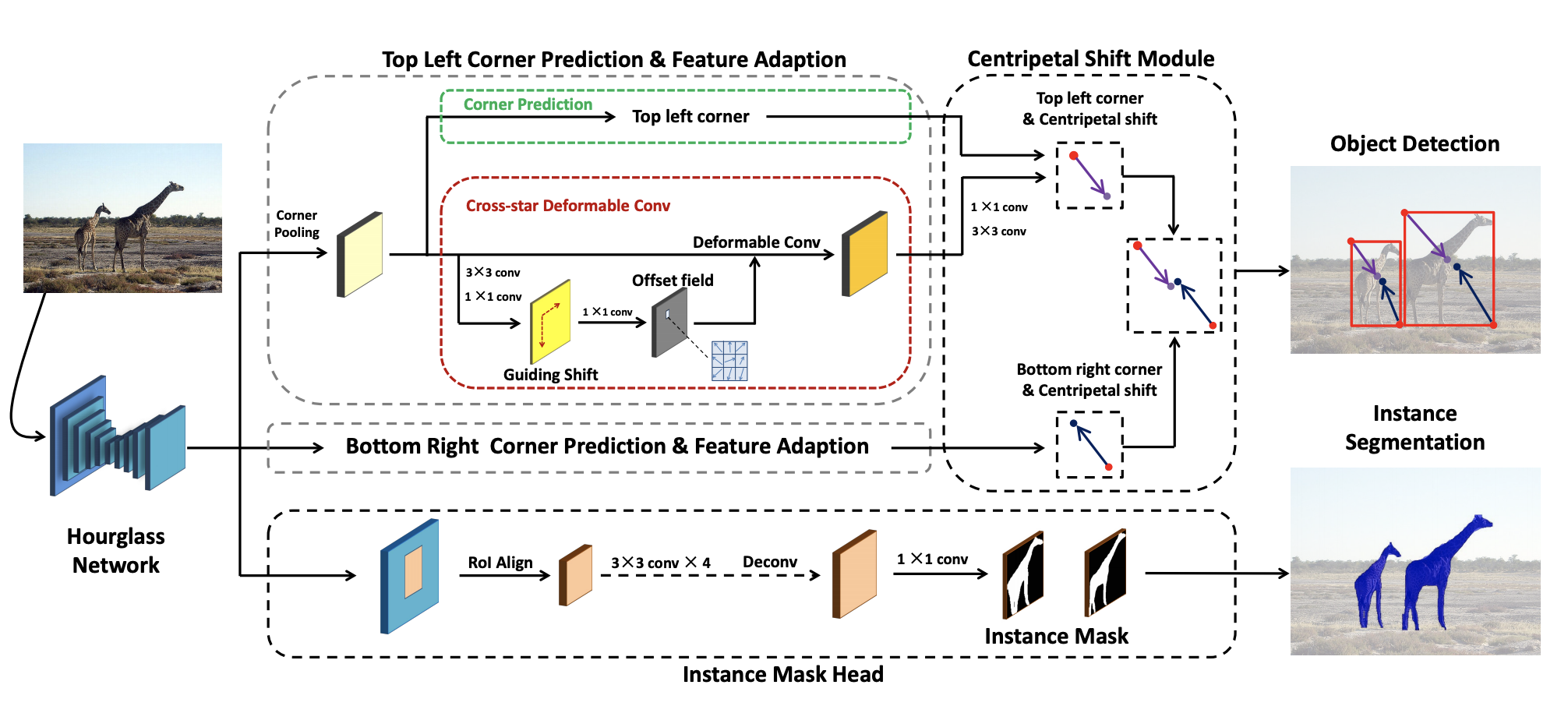
四十九、CentripetalNet
CentripetalNet 是一种基于关键点的检测器,它使用向心位移来配对来自同一实例的角点关键点。 CentripetalNet 预测角点的位置和向心偏移,并匹配偏移结果对齐的角点。
五十、Fast Focal Detection Network
F2DNet,一种新颖的两级目标检测架构,通过用焦点检测网络替换区域提议网络以及用快速抑制头替换边界框头,消除了经典两级检测器的冗余。

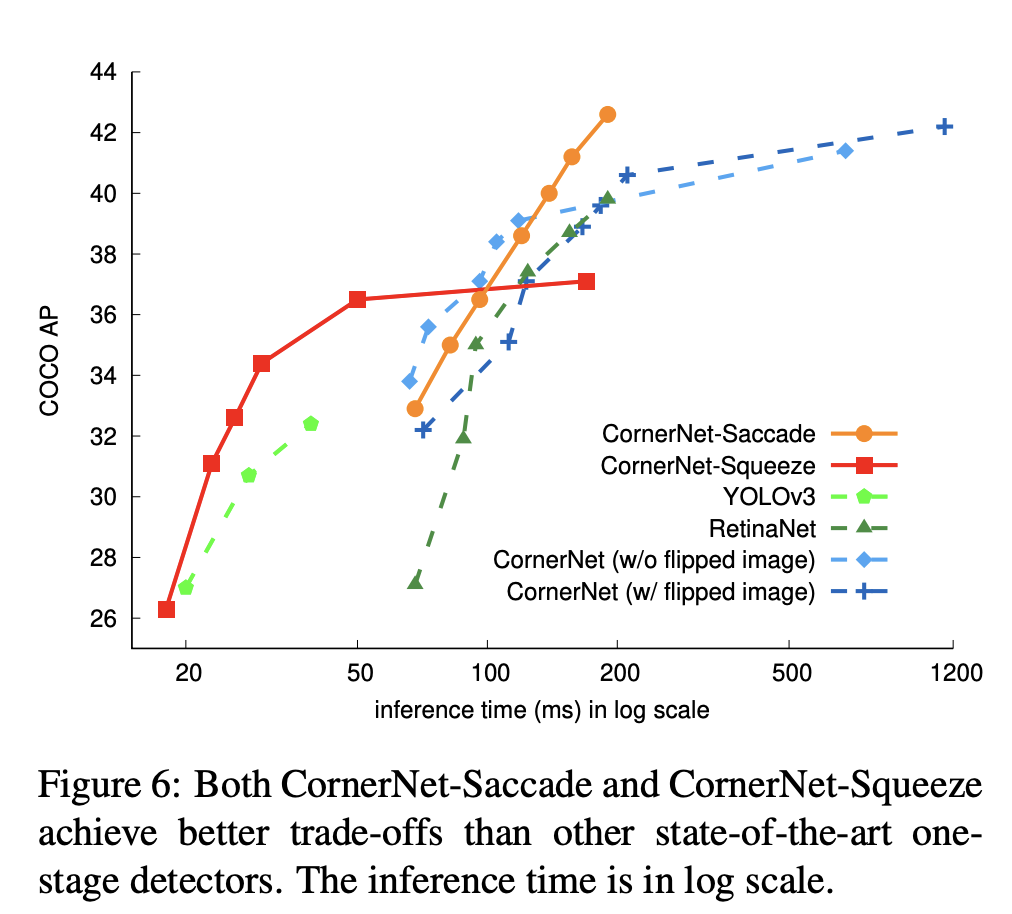
五十一、CornerNet-Squeeze
CornerNet-Squeeze 是一种物体检测器,它通过新的紧凑沙漏架构扩展了 CornerNet,该架构利用了具有深度可分离卷积的火模块。
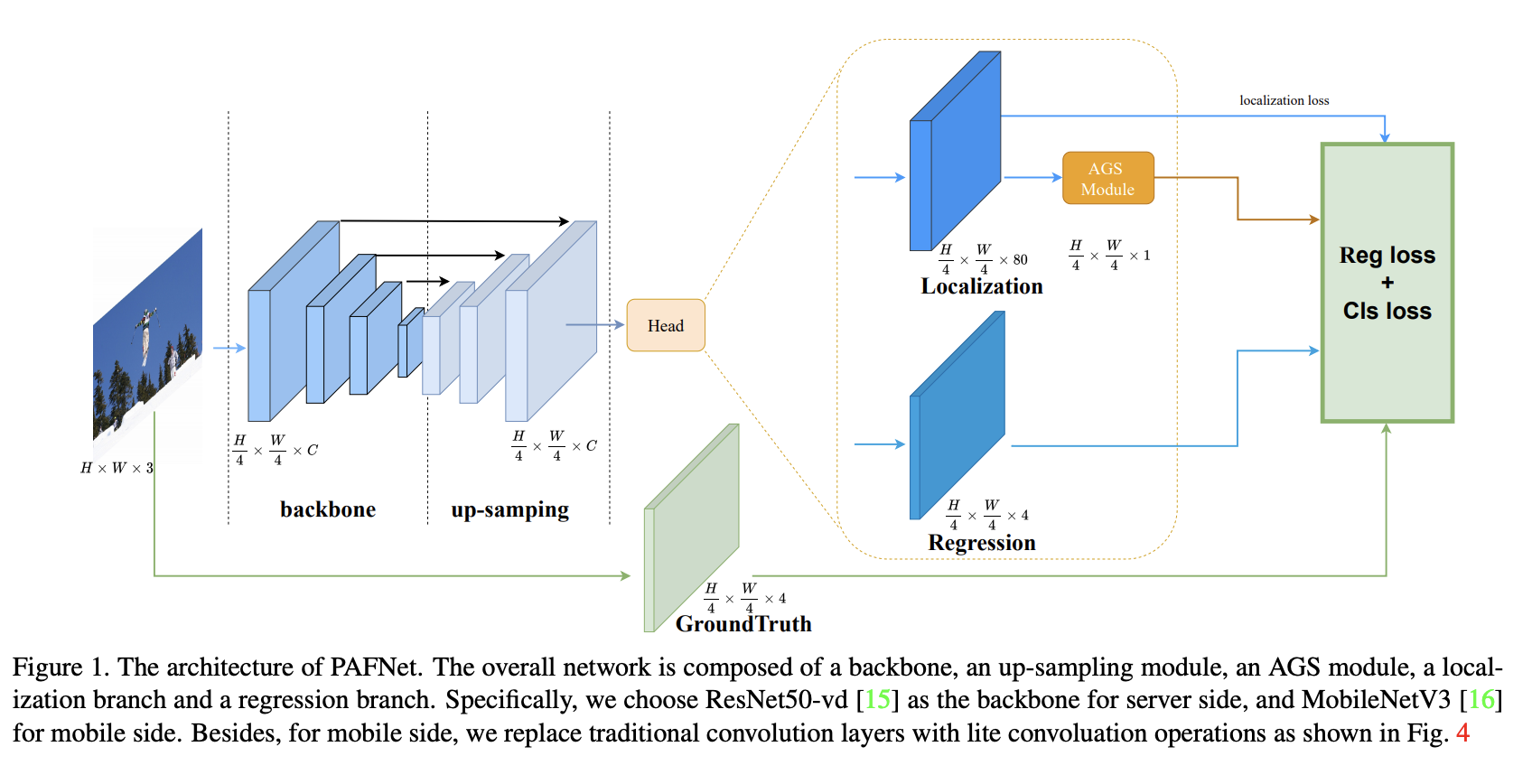
五十二、Paddle Anchor Free Network
PAFNet是一种用于目标检测的无锚点检测器,去除预定义的锚点并直接对位置进行回归,可以实现更高的效率。 整个网络由主干、上采样模块、AGS模块、定位分支和回归分支组成。 具体来说,服务器端选择ResNet50-vd作为骨干网,移动端选择MobileNetV3。 此外,对于移动端,我们用精简卷积算子替换了传统的卷积层。
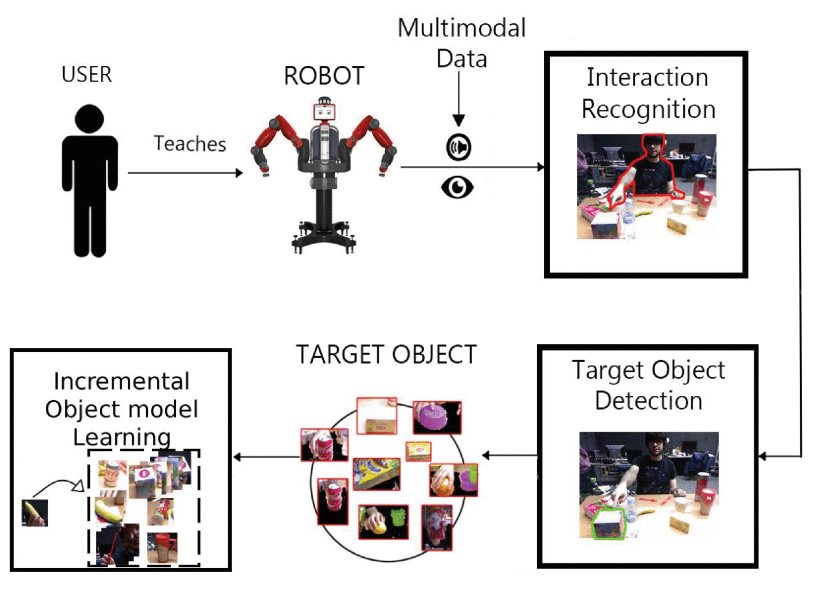
五十三、Human Robot Interaction Pipeline
我们提出的流程由三个部分组成:1)识别交互类型; 2)检测交互所针对的对象; 3)从机器人传感器记录的数据中逐步学习模型。 我们的主要贡献在于由已识别的交互引导的目标对象检测以及增量对象学习。 我们方法的新颖之处在于关注自然、异构和多模式 HRI 来逐步学习新的对象模型。