basler工业相机做双目视觉用,出现很多问题记录一下:
首先是多看手册:https://zh.docs.baslerweb.com/software
手册内有所有的源码和参考示例,实际上在使用过程中,大部分都是这些源码,具体项目选择对应的示例代码。
一、相机和镜头选型
可以通过balser的镜头选型工具,按照自己需要策略目标的距离,目标大小等信息进行配置选择,地址在这;界面如下:
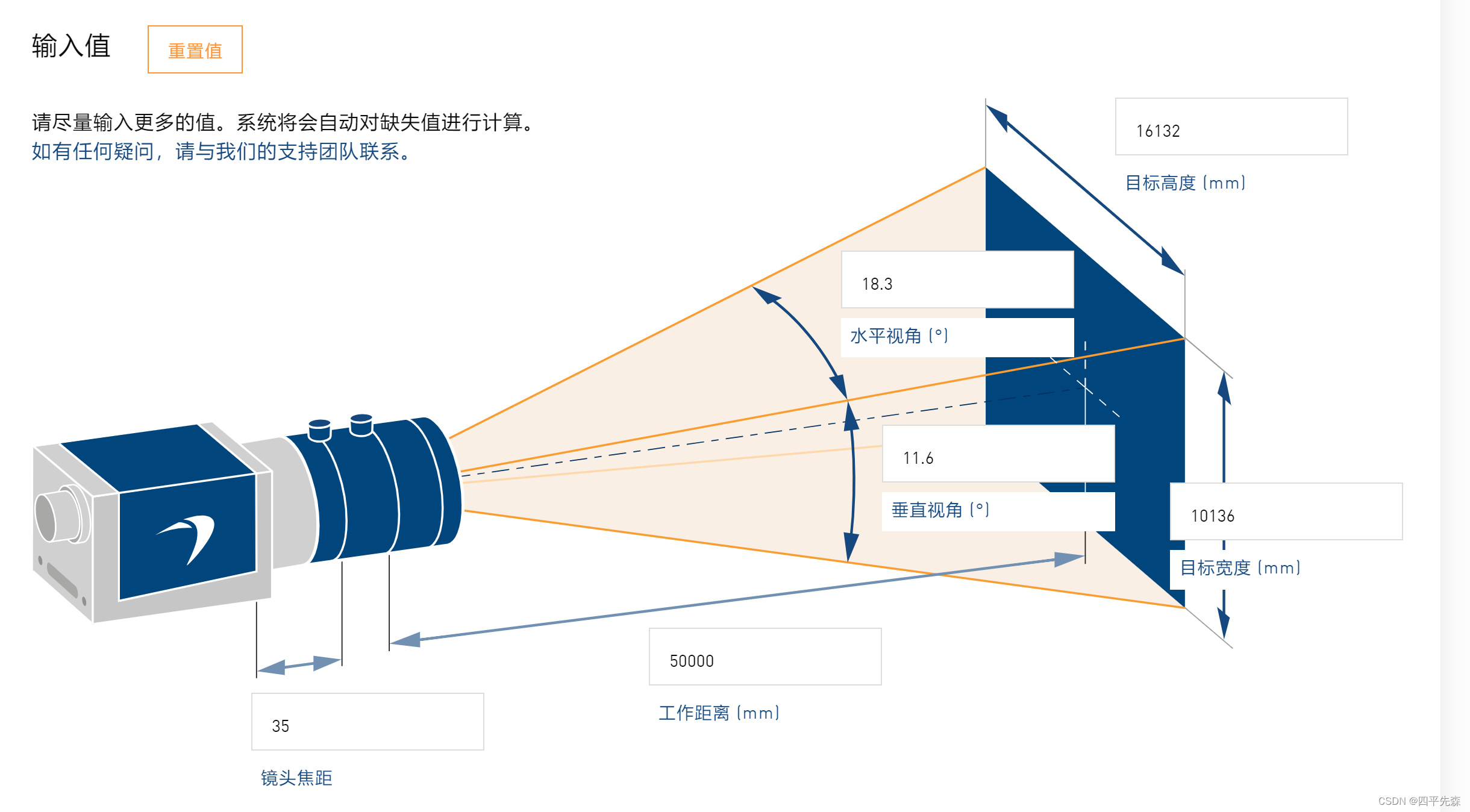
相机的焦距大小一般和测量的目标距离有关系,一般对应的选择方式总结如下:
(1)焦距越小,测量的范围越大,相应的,目标一般都看起来很小,类似于手机拍照的最小倍数拍摄目标;
(2)焦距越大,测量范围就越窄,对远距离小目标的检查就比较好,但是太大的焦距会导致大目标容易拍不全,类似与手机拍照放大倍数拍摄目标;
(3)具体有计算公式,可以参考,建议直接通过basler的配置工具进行选择
二、相机安装和使用
(1)balser相机使用需要网线和电源线(12V供电),可以在官网找对应的线材;
(2)相机接上电源,网线连接计算机后,去官网下载相机软件和驱动,一般windows下安装后,会在目录下生成对应的文件夹,包括C++对应的库和参考代码示例等,linux下直接下载tar.gz包,解压防止到对应的文件目录下,执行:source pylon目录/bin/pylon-setup-env.sh ./pylon目录 即可,例如我安装的是pylon7.3.0,解压后的目录为:/opt/pylon7,里面直接就是inlcude这些文件夹,在linux下目录执行:
source /opt/pylon7/bin/pylon-setup-env.sh /opt/pylon7
完成linux下相机驱动和环境的安装。
(3)配置相机IP,windows下配置相机IP可以使用basler的工具:
ipconfigurator,Linux下如果安装的系统有GUI界面,一样可以使用,配置相机IP地址,保证IP地址和接计算机的接口IP地址在同一网段即可,子网掩码推荐255。255.255.0,厂家说其他的可能会出现异常断开错误;
(4)IP配置完成后,在windows下启动pylon Viewer工具,查看相机,能找到相机说明IP配置正确,确保计算机和相机处于同一个网段内
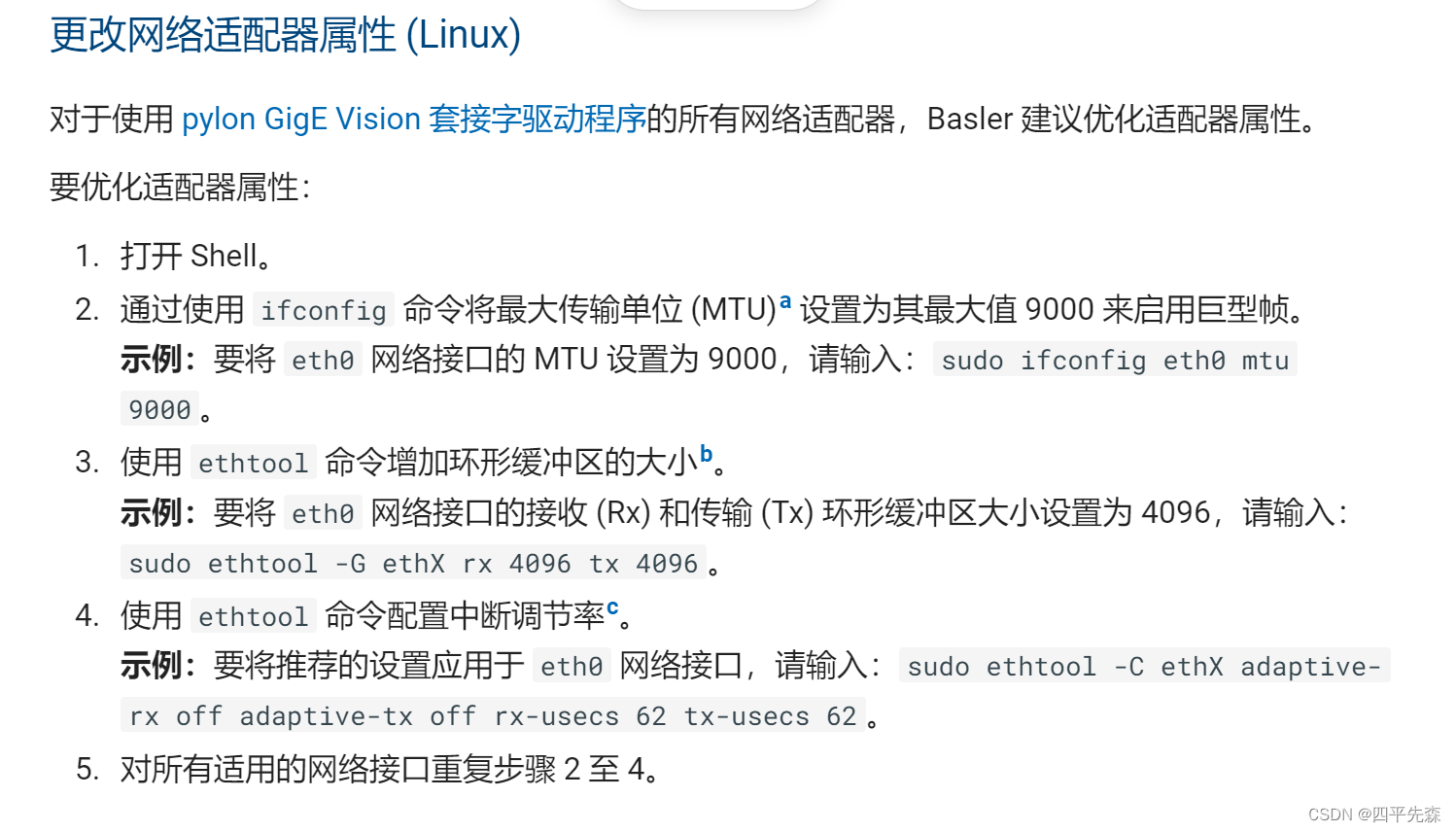
(5)要保持basler相机的帧率,需要保证千兆网,如果是两个相机,连交换机之后就要求是2000M的网,依次类推,才可以达到最大帧率,否则会出现相机丢帧等问题,直连相机到计算机不影响,开启巨帧数就行了。
三、C++调用相机环境部署
1.相机驱动和软件安装完成后,有以下文件夹:

开发环境在development文件夹下,linux下解压之后是:
2.可以使用visua studio等C++ IDE开发工具进行编程,将依赖库和头文件等信息通过链接include和lib文件,即可开始相机调用;
四、C++相机调用
1.相机初始化:
相机初始化包括寻找相机,匹配对应相机,还可以设置相机的曝光,帧率,增益等,两个相机的初始化,依据API文档整理如下:
参加API:Grab_MultipleCameras
void initCamera()
{try{PylonInitialize(); //初始化CTlFactory& tlFactory = CTlFactory::GetInstance();pTL = dynamic_cast<IGigETransportLayer*>(tlFactory.CreateTl( BaslerGigEDeviceClass ));if (pTL == NULL){throw RUNTIME_EXCEPTION( "No GigE cameras available." );}DeviceInfoList_t allDeviceInfos;if (pTL->EnumerateDevices( allDeviceInfos ) == 0){throw RUNTIME_EXCEPTION( "No GigE cameras available." );}DeviceInfoList_t usableDeviceInfos;string left_camera_ip="172.16.105.21"//left_camera_ip 用于区分两个相机,可以通过配置的IP,序列号等进行区分if (string(allDeviceInfos[0].GetIpAddress()) == left_camera_ip) {usableDeviceInfos.push_back(allDeviceInfos[0]);subnet = allDeviceInfos[0].GetSubnetAddress();//主相机usableDeviceInfos.push_back(allDeviceInfos[1]);LOG(INFO)<<"主相机:"<<allDeviceInfos[0].GetIpAddress()<<endl;LOG(INFO)<<"副相机:"<<allDeviceInfos[1].GetIpAddress()<<endl;}else if(string(allDeviceInfos[1].GetIpAddress()) == left_camera_ip) {usableDeviceInfos.push_back(allDeviceInfos[1]);subnet = allDeviceInfos[1].GetSubnetAddress();//主相机usableDeviceInfos.push_back(allDeviceInfos[0]);LOG(INFO)<<"主相机IP:"<<allDeviceInfos[1].GetIpAddress()<<endl;LOG(INFO)<<"SubnetAddress:"<<allDeviceInfos[1].GetSubnetAddress()<<endl;LOG(INFO)<<"DefaultGateway:"<<allDeviceInfos[1].GetDefaultGateway()<<endl;LOG(INFO)<<"SubnetMask:"<<allDeviceInfos[1].GetSubnetMask()<<endl;LOG(INFO)<<"副相机IP:"<<allDeviceInfos[0].GetIpAddress()<<endl;LOG(INFO)<<"SubnetAddress:"<<allDeviceInfos[0].GetSubnetAddress()<<endl;LOG(INFO)<<"DefaultGateway:" <<allDeviceInfos[0].GetDefaultGateway()<<endl;LOG(INFO)<<"SubnetMask:"<<allDeviceInfos[0].GetSubnetMask()<<endl;}else{LOG(INFO) << "Camera IP is error ,please set IP" << endl;}// CInstantCameraArray cameras = { 2 };//初始化两个相机for (size_t i = 0; i < 2; ++i){cameras[i].Attach(tlFactory.CreateDevice(usableDeviceInfos[i]));const CBaslerGigEDeviceInfo& di = cameras[i].GetDeviceInfo();LOG(INFO) << "Camera serial: " << di.GetSerialNumber() << endl;}// srand( (unsigned) time( NULL ) );
// DeviceKey = rand();
// GroupKey = 0x112233;for (size_t i = 0; i < cameras.GetSize(); ++i){cameras[i].Attach( tlFactory.CreateDevice( usableDeviceInfos[i] ) );//cameras[i].RegisterConfiguration( new CActionTriggerConfiguration( DeviceKey, GroupKey, AllGroupMask ), RegistrationMode_Append, Cleanup_Delete );//cameras[i].SetCameraContext( i );const CBaslerGigEDeviceInfo& di = cameras[i].GetDeviceInfo();cout << "Using camera " << i << ": " << di.GetSerialNumber() << " (" << di.GetIpAddress() << ")" << endl;}cameras.Open();//相机基本设置SetCamera(cameras[0], Type_Basler_ExposureTimeAbs, expore_time_l); //曝光时间SetCamera(cameras[0], Type_Basler_GainRaw, gain_l); //增益SetCamera(cameras[0], Type_Basler_AcquisitionFrameRateAbs, fps_l); //频率SetCamera(cameras[0], Type_Basler_Width, 2448);SetCamera(cameras[0], Type_Basler_Height, 2048);SetCamera(cameras[1], Type_Basler_ExposureTimeAbs, expore_time_r); //曝光时间SetCamera(cameras[1], Type_Basler_GainRaw, gain_r); //增益SetCamera(cameras[1], Type_Basler_AcquisitionFrameRateAbs, fps_r); //频率SetCamera(cameras[1], Type_Basler_Width, 2448);SetCamera(cameras[1], Type_Basler_Height, 2048);//设置相机触发模式 TriggerSelector//TriggerSoftware//主相机设置为软件触发,输出设置为exposure active//SetCamera(cameras[0], Type_Basler_Freerun, 0);//从相机设置:触发模式为外触发,IO设置为1//SetCamera(cameras[1], Type_Basler_Line1, 0);}catch (const GenericException& e){if(cameras.IsGrabbing())cameras.StopGrabbing();// Error handlingLOG(INFO) << "init,An exception occurred." << endl<< e.GetDescription() << endl;}
}2.调用相机
调用相机时,最容易出现的问题是,grab image丢帧,在抓取图像丢帧的原因中,主要是由相机帧率设置过大,带宽不足等问题导致。
其中:
if(cameras.IsGrabbing()) 这句可以改成while循环,这样就可以持续输出,if表示就近输出了,根据实际使用情况而定,基本上抓取一帧在50ms左右。
void GetCameraImage() {try {//pTL->IssueActionCommand(DeviceKey, GroupKey, AllGroupMask, subnet );//1秒内抓取了多少张图,全部存下来int skiptime = 1000;//LOG(INFO)<<"采集图像的最长时间:"<<skiptime<<" ms"<<endl;cameras.StartGrabbing(GrabStrategy_OneByOne,GrabLoop_ProvidedByUser);if(cameras.IsGrabbing()) {std::chrono::high_resolution_clock::time_point tStartTime(std::chrono::high_resolution_clock::now());int lTimeAloInterval = 0;count_grab_once++;cameras[0].RetrieveResult(skiptime, ptrGrabResultl, TimeoutHandling_ThrowException);cameras[1].RetrieveResult(skiptime, ptrGrabResultr, TimeoutHandling_ThrowException);if (ptrGrabResultl->GrabSucceeded() && ptrGrabResultr->GrabSucceeded() ) {intptr_t cameraContextValuel = ptrGrabResultl->GetCameraContext();intptr_t cameraContextValuer = ptrGrabResultr->GetCameraContext();const uint8_t *pImageBufferl = (uint8_t *) ptrGrabResultl->GetBuffer();const uint8_t *pImageBufferr = (uint8_t *) ptrGrabResultr->GetBuffer();// 将 pylon image转成OpenCV image.Mat SaveImagel = cv::Mat(ptrGrabResultl->GetHeight(), ptrGrabResultl->GetWidth(), CV_8UC1,(uint8_t *) pImageBufferl);Mat SaveImager = cv::Mat(ptrGrabResultr->GetHeight(), ptrGrabResultr->GetWidth(), CV_8UC1,(uint8_t *) pImageBufferr);}lTimeAloInterval =std::chrono::duration_cast<std::chrono::duration<double, std::ratio<1, 1000> >>(std::chrono::high_resolution_clock::now() - tStartTime).count();LOG(INFO) << "------------ single Grab image cost time:----------------" << lTimeAloInterval << " ms" << endl;}cameras.StopGrabbing();}catch (const GenericException& e){if(cameras.IsGrabbing())cameras.StopGrabbing();// Error handlingLOG(INFO) << "An exception occurred." << endl<< e.GetDescription() << endl;}}
3.关闭相机
相机及时关闭:
void CloseCamera()
{//最后终止Pylon相机,即调用PylonTerminate。//关闭摄像头try{if (cameras.IsOpen()) {cameras.DetachDevice();cameras.Close();cameras.DestroyDevice();//关闭库LOG(INFO) << "SBaslerCameraControl deleteAll: PylonTerminate";PylonTerminate();}}catch (const Pylon::GenericException& e){LOG(INFO) << "close camera failed..." << e.what();}
}
五、常见问题
1.相机连不上
IP配置不正确,确保在同一网段,子网掩码相同。
2.连接后丢帧
Error: e1004 The bufer was incopletely gratbed. This can be caused by perfomnane problens of the metwork hardware used,fer underuns can also case ina loss.To fix this, us the pylonbioEtonfigurator tol to optinize your setip and use more uffers for aratbin in your aplication to prerent buferunderruns
常见于连接多个相机的时候出现,确保开启巨帧,相机帧率和网络传输的帧率是否满足要求,[参加API手册]。(https://zh.docs.baslerweb.com/network-configuration-%28gige-cameras%29)
3.相机连接后,使用过程中出现找得到相机,但卡住不动了
这种问题不知道是什么原因导致的,可能是长时间没调用导致相机休眠,关机重启下可解决。
4.grab time out 抓取超时
一般是设置waittime时间太短导致,可以改大一些:
cameras[1].RetrieveResult(waittime, ptrGrabResultr, TimeoutHandling_ThrowException);
还有一种可能是相机连上之后一直么有抓取成功,导致等待时间过长,需要检查代码,常见有时候做触发的操作导致。