文章目录
- AVL树结点的定义
- Insert
- 左单旋
- 右单旋
- 右左双旋
- 左右双旋
- AVL树的验证
- AVL树的性能
- 完整代码
AVL树结点的定义
AVL树中的结点定义为三叉链结构,并在每个结点当中引入平衡因子(右子树高度-左子树高度)
template<class K ,class V>
struct AVLTreeNode
{//三叉链AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;// 存储键值对 pair<K, V> _kv;//平衡因子int _bf;AVLTreeNode( const pair<K,V> kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0) //一开始左右子树为空树,平衡因子为0{}
};
Insert
bool Insert(const pair<K,V> kv){//1、找到待插入位置//空树 if (_root == nullptr){_root = new Node(kv);return true;}//不是空树 Node* parent = nullptr;Node* cur = _root;while (cur!= nullptr){//待插入结点的key值 < 当前结点的key值if (cur->_kv.first > kv.first){//往左子树找parent = cur;cur = cur->_left;}// 待插入结点的key值 > 当前结点的key值else if (cur->_kv.first < kv.first){//往右子树找 parent = cur;cur = cur->_right;}else//相等{return false;}}//将待插入节点插入到树中 cur = new Node(kv);//???if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//更新平衡因子,如果出现不平衡,就进行旋转while (parent !=nullptr) //最坏更新到根节点{//parent的左子树增高if (cur == parent->_left){parent->_bf--;}else //cur == _parent->_right//parent的右子树增高{parent->_bf++;}//结束平衡if (parent->_bf == 0){break;}else if (parent->_bf ==1|| parent->_bf == -1){//继续向上更新cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//子树已经不平衡了,旋转保持平衡//左单旋if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);break;}//右单旋else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);break;} //右左单旋else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);break;}//左右单旋if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);break;}}else{assert(false);}}return true;}
1、找到待插入位置。
待插入结点的key值<当前结点, 就插入到该结点的左子树。
待插入结点的key值>当前结点, 就插入到该结点的右子树。
待插入结点的key值==当前结点的key值 ,就插入失败。
2、找到待插入位置后,将待插入结点插入到树中。
3、更新平衡因子,如果出现不平衡,则需要进行旋转
平衡因子的更新:
一个结点的平衡因子是否需要更新,是看该结点的左右子树的高度有没有发生变化,因此插入一个结点后,该结点的祖先结点的平衡因子可能需要更新。

插入结点后需要倒着往上更新平衡因子:
1、新增结点在parent的右边,parent的平衡因子+ +

2、新增结点在parent的左边,parent的平衡因子− −

每更新完一个结点的平衡因子后:有以下几种情况需要注意
更新后parent平衡因子== 1or-1,说明parent所在的子树的高度变化,会再影响祖先,需要继续沿着到root的路径往上更新
更新后parent平衡因子==0,说明parent所在的子树的高度不变,不会再影响祖先,不用再继续沿着到根节点的路径往上更新
更新后parent平衡因子==2 or -2,说明parent所在的子树的高度变化且不平衡,对parent所在子树进行旋转,让他平衡
最坏情况下,更新平衡因子会一路更新到根结点。例如:

插入结点后需要倒着往上进行平衡因子的更新,所以我们将AVL树结点的结构设置为了三叉链结构,这样可以通过父指针找到其父结点,进而对其平衡因子进行更新。
cur(插入结点),parent(cur的父节点)
结论:当parent的平衡因子为-2/2时,cur的平衡因子必定是-1/1而不会是0
左单旋

1、让subR的左子树作为parent的右子树。
subR的左子树中结点的值 > parent的值,因此可以作为parent的右子树。
2、让parent作为subR的左子树。
parent结点的值和parent的左子树中结点的值 < subR的值,因此可以作为subR的左子树。
3、让subR作为整个子树的根。
4、更新平衡因子。

经过左单旋后,树的高度变为插入之前了,即树的高度没有发生变化,所以左单旋后无需继续往上更新平衡因子。
分析h可能的取值:
插入之前:a, b ,c是符合AVL规则的子树
当h(树的高度)为0时

当h(树的高度)为1时

当h(树的高度)为2时,a,b就是x,y,z中任意一种类型 ,c一定是z的类型

为什么c一定是z的类型?
如果c是y类型 ,新插入节点在左边可能不需要旋转

举几个实例:

//左单旋 void RotateL(Node * parent ){//保持搜索树 //变成平衡树且降低树的高度 Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;if (curleft!=nullptr){curleft->_parent = parent;}cur->_left = parent;Node* ppnode = parent->_parent;parent->_parent = cur;//如果parent不是一个子树 ,即parent就是根节点 if (parent == _root){_root = cur;cur->_parent = nullptr;}else//如果parent 是一个子树 {if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}//修改平衡因子 parent->_bf = cur->_bf = 0;}
右单旋
模型步骤:
1、让subL的右子树作为parent的左子树。
subL的右子树当中结点的值 < parent的值,因此可以作为parent的左子树。
2、让parent作为subL的右子树。
parent及其右子树当中结点的值 > subL的值,因此可以作为subL的右子树。
3、让subL作为整个子树的根。
4、更新平衡因子。

经过右单旋后,树的高度变为插入之前了,即树的高度没有发生变化,所以右单旋后无需继续往上更新平衡因子。
//右单旋void RotateR(Node* parent){Node * cur = parent->_left;Node * curright = cur->_right;//b作为60的左子树 parent->_left= curright;if (curright !=nullptr){curright->_parent = parent;}Node* ppnode = parent->_parent;//60作为30的右子树cur->_right = parent;parent->_parent = cur;//parent作为根节点if (ppnode == nullptr){//将cur改成根节点_root = cur;cur->_parent = nullptr;}else//parent不是根节点,作为一个子树{//将cur改成这个子树的根节点 if (ppnode->_left ==parent){ppnode->_left = cur ;cur->_parent = ppnode;}else//ppnode->_right ==parent{ppnode->_right = cur;cur->_parent = ppnode;}}parent->_bf = cur->_bf = 0;}
分析h可能的取值:
插入之前:a, b ,c是符合AVL规则的子树
当h(树的高度)为0时

当h(树的高度)为1时

当h(树的高度)为2时,b,c就是x,y,z中任意一种类型 ,a一定是z的类型

右左双旋
1、插入新结点。

2、以90为旋转点进行右单旋。

3、以30为旋转点进行左单旋。

步骤:
1、以subR(90)为旋转点进行右单旋。
2、以parent(30)为旋转点进行左单旋。
3、更新平衡因子。
void RotateRL(Node* parent) //右左双旋{Node* cur = parent->_right;Node* curleft = cur->_left;//90为旋转点,进行右单旋RotateR(parent->_right); //30为旋转点,进行左单旋RotateL(parent);//更新平衡因子int bf = curleft->_bf;//插入节点就是60if (bf == 0){curleft->_bf = 0;parent->_bf = 0;cur->_bf = 0;}//插入节点是60的右边else if(bf ==1){curleft->_bf = 0;parent->_bf = -1;cur->_bf = 0;}//插入节点是60的左边else if (bf==-1){curleft->_bf = 0;parent->_bf = 0;cur->_bf = 1;}else{assert(false);}}分析h可能的取值:
插入之前:a, b ,c是符合AVL规则的子树
当h(树的高度)为0时

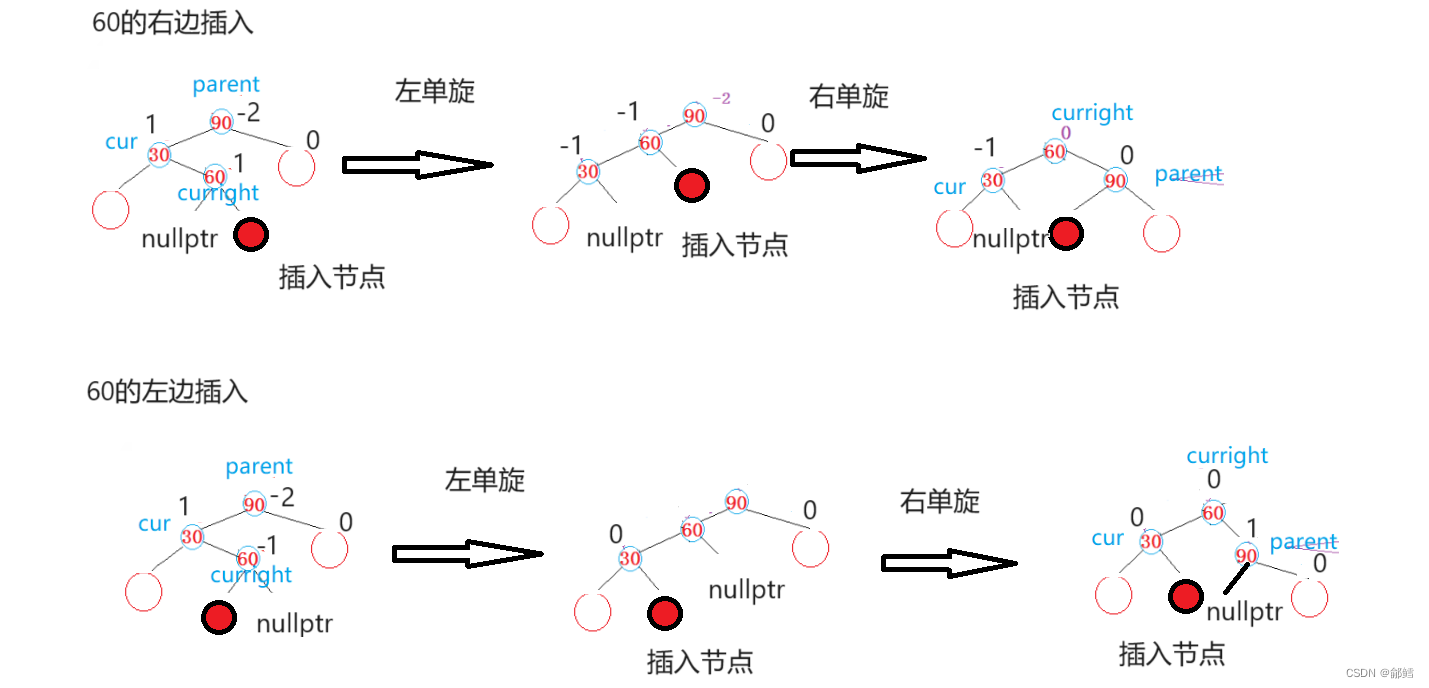
当h(树的高度)为1时,有两种情况:
1、插入节点是60的左边
2、插入节点是60的右边
区分关键:看60的平衡因子

当h(树的高度)为2时,a, d是x,y,z中任意一颗子树

右左双旋的本质:
60的左边给30的右边
60的右边给90的左边
60成了这棵树的根
左右双旋
1、插入新结点。

2、以30为旋转点进行左单旋。

3、以90为旋转点进行右单旋。

步骤:
1、以subL为旋转点进行左单旋。
2、以parent为旋转点进行右单旋。
3、更新平衡因子。
左右双旋后,实际上就是让subLR的左子树和右子树,分别作为subL和parent的右子树和左子树,再让subL和parent分别作为subLR的左右子树,最后让subLR作为整个子树的根(结合图理解)。
三种情况会引发双旋

1、60就是新增

2、b 或者c 插入
void RotateLR(Node* parent){Node* cur = parent->_left;Node* curright = cur->_right;//30为旋转点,进行左单旋RotateL(cur);//90为旋转点,进行右单旋RotateR(parent);//更新平衡因子int bf = curright->_bf;//插入节点就是60if (bf == 0){cur->_bf = curright->_bf = parent->_bf = 0;}//插入节点是60的左边else if (bf == -1){curright->_bf = parent->_bf = 0;cur->_bf = 1;}//插入节点是60的右边else if (bf == 1){cur->_bf = curright->_bf = 0;parent->_bf = 1;}else{assert(false);}}
AVL树的验证
满足AVL,就满足 右子树-左子树的高度差 < 2 ,在该过程中我们可以检查每个结点当中平衡因子是否正确。
int Height(Node *root){if (root == nullptr){return 0;}int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);if (leftHeight > rightHeight){return leftHeight + 1;}else//(leftHeight <= rightHeight){return rightHeight + 1;}}bool IsBalance(){return _IsBalance(_root);}bool _IsBalance(Node* root){if (root == nullptr){return true;}//左右子树高度差 < 2 int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);if ( (rightHeight - leftHeight) != root->_bf){cout << "平衡因子异常:" << root->_kv.first << "->" << root->_bf << endl;return false;}else if (abs(rightHeight - leftHeight) < 2 && _IsBalance(root->_left) && _IsBalance(root->_right) ){return true; }else { return false; }}
AVL树的性能
AVL树是一棵绝对平衡的二叉搜索树,其要求每个结点的左右子树高度差的绝对值都不超过1,这样可以保证查询时高效的时间复杂度,即logN。但是如果要对AVL树做一些结构修改的操作,性能非常低下,比如:插入时要维护其绝对平衡,旋转的次数比较多,更差的是在删除时,有可能一直要让旋转持续到根的位置。
因此,如果需要一种查询高效且有序的数据结构,而且数据的个数为静态的(即不会改变),可以考虑AVL树,但当一个结构经常需要被修改时,AVL树就不太适合了。
完整代码
#include<iostream>
#include<map>
#include<vector>
#include<assert.h>
using namespace std;
template<class K ,class V>
struct AVLTreeNode
{//三叉链AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;//方便找到其父结点// 存储键值对 pair<K, V> _kv;//平衡因子int _bf;AVLTreeNode( const pair<K,V> kv):_left(nullptr),_right(nullptr),_parent(nullptr),_kv(kv),_bf(0) //一开始左右子树为空树,平衡因子为0{}
};template <class K ,class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K,V> kv){//1、找到待插入位置//空树 if (_root == nullptr){_root = new Node(kv);return true;}//不是空树 Node* parent = nullptr;Node* cur = _root;while (cur!= nullptr){//待插入结点的key值 < 当前结点的key值if (cur->_kv.first > kv.first){//往左子树找parent = cur;cur = cur->_left;}// 待插入结点的key值 > 当前结点的key值else if (cur->_kv.first < kv.first){//往右子树找 parent = cur;cur = cur->_right;}else//相等{return false;}}//将待插入节点插入到树中 cur = new Node(kv);//???if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//更新平衡因子,如果出现不平衡,就进行旋转while (parent !=nullptr) //最坏更新到根节点{//parent的左子树增高if (cur == parent->_left){parent->_bf--;}else //cur == _parent->_right//parent的右子树增高{parent->_bf++;}//结束平衡if (parent->_bf == 0){break;}else if (parent->_bf ==1|| parent->_bf == -1){//继续向上更新cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//子树已经不平衡了,旋转保持平衡//左单旋if (parent->_bf == 2 && cur->_bf == 1){RotateL(parent);break;}//右单旋else if (parent->_bf == -2 && cur->_bf == -1){RotateR(parent);break;} //右左单旋else if (parent->_bf == 2 && cur->_bf == -1){RotateRL(parent);break;}//左右单旋if (parent->_bf == -2 && cur->_bf == 1){RotateLR(parent);break;}}else{assert(false);}}return true;}//左单旋 void RotateL(Node * parent ){//保持搜索树 //变成平衡树且降低树的高度 Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;if (curleft!=nullptr){curleft->_parent = parent;}cur->_left = parent;Node* ppnode = parent->_parent;parent->_parent = cur;//如果parent不是一个子树 ,即parent就是根节点 if (parent == _root){_root = cur;cur->_parent = nullptr;}else//如果parent 是一个子树 {if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}//修改平衡因子 parent->_bf = cur->_bf = 0;}//右单旋void RotateR(Node* parent){Node * cur = parent->_left;Node * curright = cur->_right;//b作为60的左子树 parent->_left= curright;if (curright !=nullptr){curright->_parent = parent;}Node* ppnode = parent->_parent;//60作为30的右子树cur->_right = parent;parent->_parent = cur;//parent作为根节点if (ppnode == nullptr){//将cur改成根节点_root = cur;cur->_parent = nullptr;}else//parent不是根节点,作为一个子树{//将cur改成这个子树的根节点 if (ppnode->_left ==parent){ppnode->_left = cur ;cur->_parent = ppnode;}else//ppnode->_right ==parent{ppnode->_right = cur;cur->_parent = ppnode;}}parent->_bf = cur->_bf = 0;}void RotateRL(Node* parent) //右左双旋{Node* cur = parent->_right;Node* curleft = cur->_left;//90为旋转点,进行右单旋RotateR(parent->_right); //30为旋转点,进行左单旋RotateL(parent);//更新平衡因子int bf = curleft->_bf;//插入节点就是60if (bf == 0){curleft->_bf = 0;parent->_bf = 0;cur->_bf = 0;}//插入节点是60的右边else if(bf ==1){curleft->_bf = 0;parent->_bf = -1;cur->_bf = 0;}//插入节点是60的左边else if (bf==-1){curleft->_bf = 0;parent->_bf = 0;cur->_bf = 1;}else{assert(false);}}void RotateLR(Node* parent){Node* cur = parent->_left;Node* curright = cur->_right;//30为旋转点,进行左单旋RotateL(cur);//90为旋转点,进行右单旋RotateR(parent);//更新平衡因子int bf = curright->_bf;//插入节点就是60if (bf == 0){cur->_bf = curright->_bf = parent->_bf = 0;}//插入节点是60的左边else if (bf == -1){curright->_bf = parent->_bf = 0;cur->_bf = 1;}//插入节点是60的右边else if (bf == 1){cur->_bf = curright->_bf = 0;parent->_bf = 1;}else{assert(false);}}int Height(Node *root){if (root == nullptr){return 0;}int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);if (leftHeight > rightHeight){return leftHeight + 1;}else//(leftHeight <= rightHeight){return rightHeight + 1;}}bool IsBalance(){return _IsBalance(_root);}bool _IsBalance(Node* root){if (root == nullptr){return true;}//左右子树高度差 < 2 int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);if ( (rightHeight - leftHeight) != root->_bf){cout << "平衡因子异常:" << root->_kv.first << "->" << root->_bf << endl;return false;}else if (abs(rightHeight - leftHeight) < 2 && _IsBalance(root->_left) && _IsBalance(root->_right) ){return true; }else { return false; }}
private:Node* _root =nullptr;
};测试代码
#include"AVLTree.h"void Test1()
{AVLTree<int, int> t;int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };for (auto e : a){/*手动断点*/if (e == 7){int x = 10;//仅仅是为了打断点,空语句不能打断点}t.Insert(make_pair(e, e));//cout << "Insert :"<<e<<"->";////cout<< t.IsBalance();//cout << endl;cout << "Insert:" << e << "->" << t.IsBalance() << endl;}
}void Test2() //测试左单旋函数
{AVLTree<int, int> t;int a[] = { 30,60,90 };for (auto e : a){t.Insert( make_pair(e,e) ) ;cout << "Insert:" << e << "->" << t.IsBalance() << endl;}}
int main()
{Test1();//Test2();return 0;
}