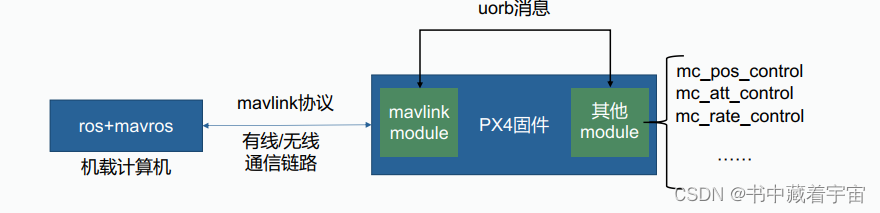
px4仿真实现无人机自主飞行


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/129712.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
集线器、交换机、路由器是如何转发包的
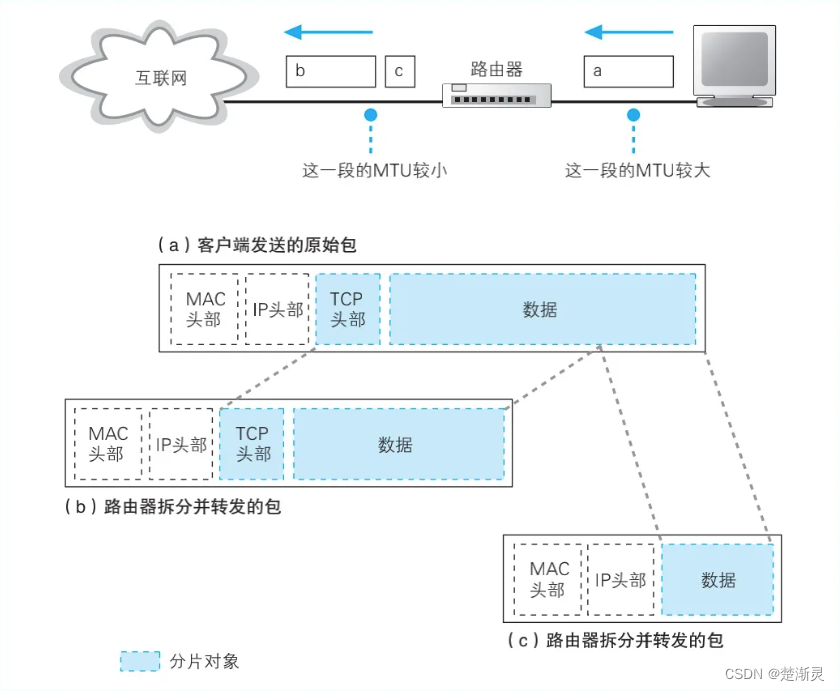
集线器、交换机、路由器是如何转发包的 集线器交换机MAC地址表的维护 路由器路由表中的信息路由器的包接收操作查询路由表确定输出端口找不到匹配路由时选择默认路由包的有效期通过分片功能拆分大网络包路由器发送操作中的一些特点 参考文档 集线器 集线器是一层(物…

百度小程序制作源码 百度引流做关键词排名之技巧
百度作为国内最大的搜索引擎,对于关键词排名和流量获取的策略格外重要,下面给大家分享一个百度小程序制作源码和做百度引流、关键词排名的一些技巧。
移动设备的普及和微信小程序的火热,百度也推出了自己的小程序。百度小程序与微信小程序类…

【C++】哈希与布隆过滤器
🌇个人主页:平凡的小苏 📚学习格言:命运给你一个低的起点,是想看你精彩的翻盘,而不是让你自甘堕落,脚下的路虽然难走,但我还能走,比起向阳而生,我更想尝试逆风…

常见的通用型项目管理软件推荐
常用项目管理软件有很多。按适合的行业来分,有针对各种垂直行业定制的,也有全行业通用的。从厂商来看,有国外研发的,也有国内厂商的,体现在软件的设计思路不同,上手的手感也很不一样。从体量来看࿰…

Rust中的枚举和模式匹配
专栏简介:本专栏作为Rust语言的入门级的文章,目的是为了分享关于Rust语言的编程技巧和知识。对于Rust语言,虽然历史没有C、和python历史悠远,但是它的优点可以说是非常的多,既继承了C运行速度,还拥有了Java…
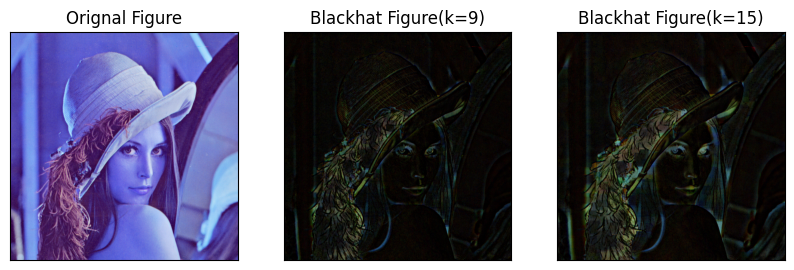
3.3.OpenCV技能树--二值图像处理--图像形态学操作
文章目录 1.图像形态学运算简介2.图像开运算处理2.1.图像开运算处理简介2.2.图像开运算处理代码2.3.图像开运算处理效果 3.图像闭运算处理3.1.图像闭运算处理简介3.2.图像闭运算处理代码3.3.图像闭运算处理效果 4.图像形态学梯度处理4.1.图像形态学梯度处理简介4.2.图像形态学梯…
redis,mongoDB,mysql,Elasticsearch区别
Redis: Redis是一种高性能键值存储数据库,基于内存操作,支持数据持久化,支持数据类型丰富灵活,如字符串、哈希、列表、集合、有序集合等。Redis还提供了订阅/发布、事务、Lua脚本、主从同步等功能,适用于访…

python编程:使用 Pillow 将照片转换为1寸报名照片
引言: 在现代科技时代,我们经常需要调整和处理照片以适应特定的需求和用途。本文将介绍如何使用 wxPython 和 Pillow 库,通过一个简单的图形界面程序,将选择的照片转换为指定尺寸的 JPG 格式,并保存在桌面上。
C:\pyt…

Java实验(头歌) -Java继承和多态接口
/*** 编写程序,实现两个数的求和运算和比较*/
// 请在下面的Begin-End之间按照注释中给出的提示编写正确的代码
/********** Begin **********/
// 定义一个接口类 Compute// 第一个为 sum(),实现两个数的相加,返回值为 int// 第二个为 max()…
导引服务机器人 通用技术条件
声明
本文是学习GB-T 42831-2023 导引服务机器人 通用技术条件. 而整理的学习笔记,分享出来希望更多人受益,如果存在侵权请及时联系我们
6 检验规则
6.1 检验项目
检验分为型式检验和出厂检验。检验项目见表2。
表 2 检验项目 序号 检验项目 技术要求 检验方法 出厂检验 型…
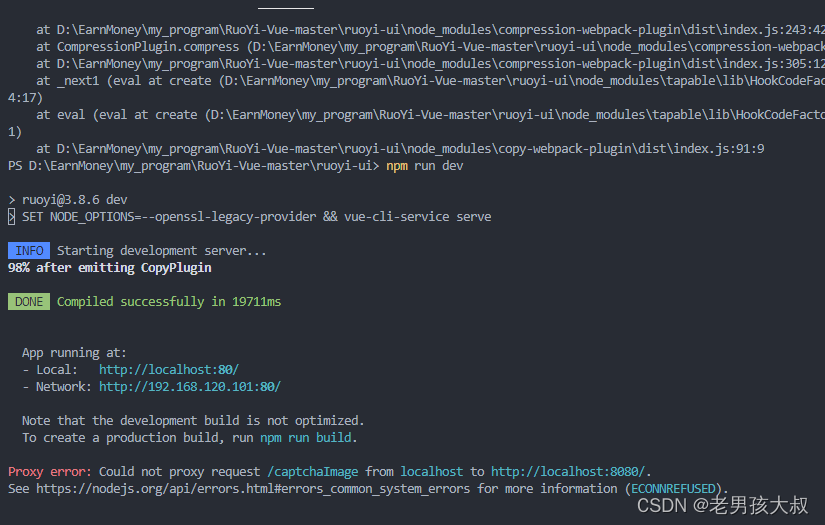
vue启动项目,npm run dev出现error:0308010C:digital envelope routines::unsupported
运行vue项目,npm run dev的时候出现不支持错误error:0308010C:digital envelope routines::unsupported。
在网上找了很多,大部分都是因为版本问题,修改环境之类的,原因是对的但是大多还是没能解决。经过摸索终于解决了。
方法如…

web漏洞-xml外部实体注入(XXE)
web漏洞-xml外部实体注入(XXE) 目录 web漏洞-xml外部实体注入(XXE)概念危害检测方法利用方法漏洞利用xxe-lab有回显情况无回显情况 pikachu靶场有回显内容无回显 修复方案 概念 xml可拓展标记语言: xml是一种可拓展的标…