| 原理 | 优点 | 缺点 | |
| GAP | 将多维特征映射降维为一个固定长度的特征向量 | ①减少了模型的参数量;②保留更多的空间位置信息;③可并行计算,计算效率高;④具有一定程度的不变性 | ①可能导致信息的损失;②忽略不同尺度的空间信息 |
| CAM | 利用最后一个卷积层的特征图×权重(用GAP代替全连接层,重新训练,经过GAP分类后概率最大的神经元的权重) | 效果已经很不错 | 需要修改原模型的结构,导致需要重新训练该模型,大大限制了使用场景,如果模型已经上线了,或着训练的成本非常高,我们几乎是不可能为了它重新训练的。 |
| Grad-CAM | 最后一个卷积层的特征图×权重(通过对特征图梯度的全局平均来计算权重) | ①解决了CAM的缺点,适用于任何卷积神经网络;②利用特征图的梯度,可视化结果更准确和精细 | |
| Grad-CAM++ | 1. 定位更准确 2. 更适合同类多目标的情况 | ||
GAP全局平均池化
论文:Network In Network
GAP (Global Average Pooling,全局平均池化),在上述论文中提出,用于避免全连接层的过拟合问题。全局平均池化就是对整个特征映射应用平均池化。
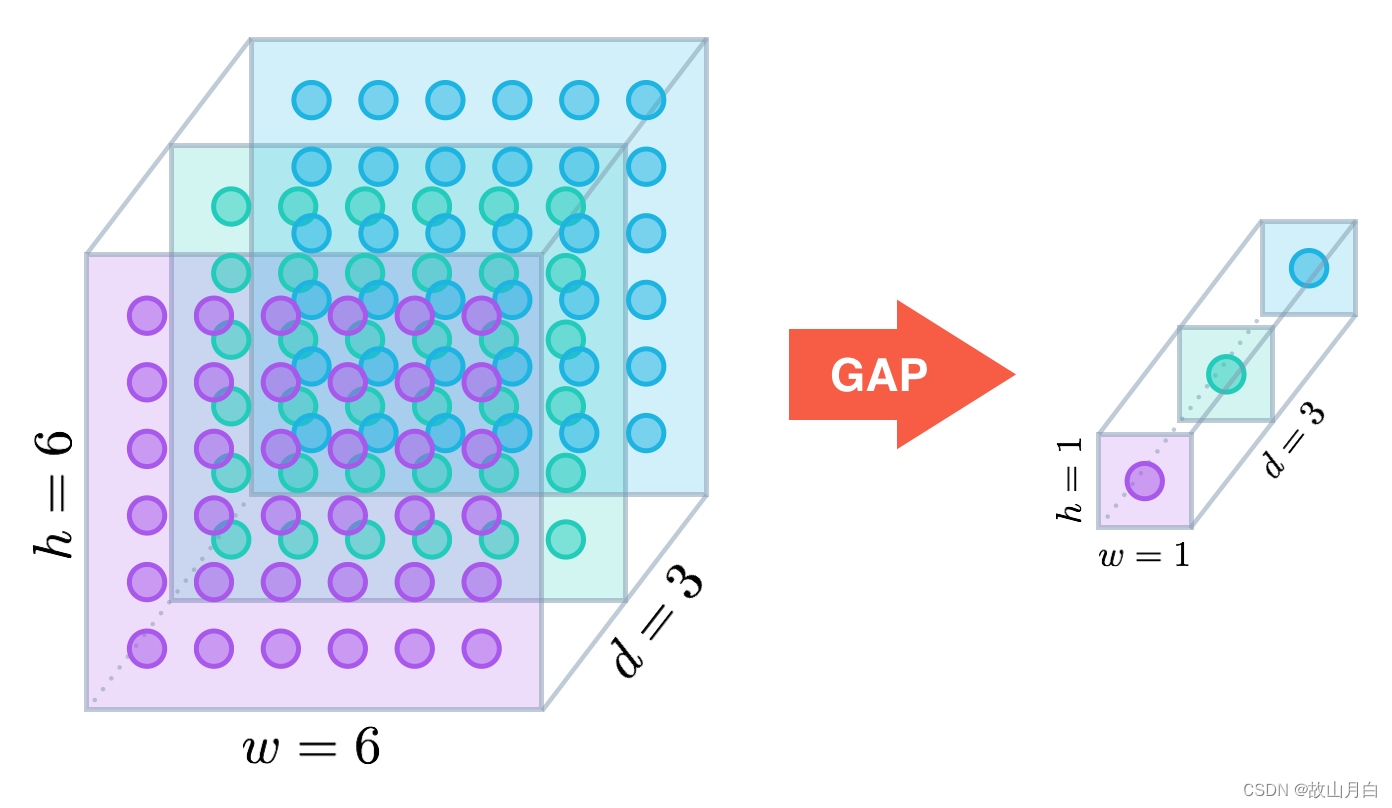
图1:将原本h × w × d的三维特征图,具体大小为6 × 6 × 3,经过GAP池化为1 × 1 × 3 输出值。也就是每一个channel的h × w 平均池化为一个值。特征图经过 GAP 处理后每一个特征图包含了不同类别的信息。
GAP平均池化的操作步骤如下:
- 经过卷积操作和激活函数后,得到最后一个卷积层的特征图。
- 对每个通道的特征图进行平均池化,即计算每个通道上所有元素的平均值。这将每个通道的特征图转化为一个标量值。
- 将每个通道的标量值组合成一个特征向量。这些标量值的顺序与通道的顺序相同。
- 最终得到的特征向量可以作为分类器的输入,用于进行图像分类。
CAM
论文:Learning Deep Features for Discriminative Localization
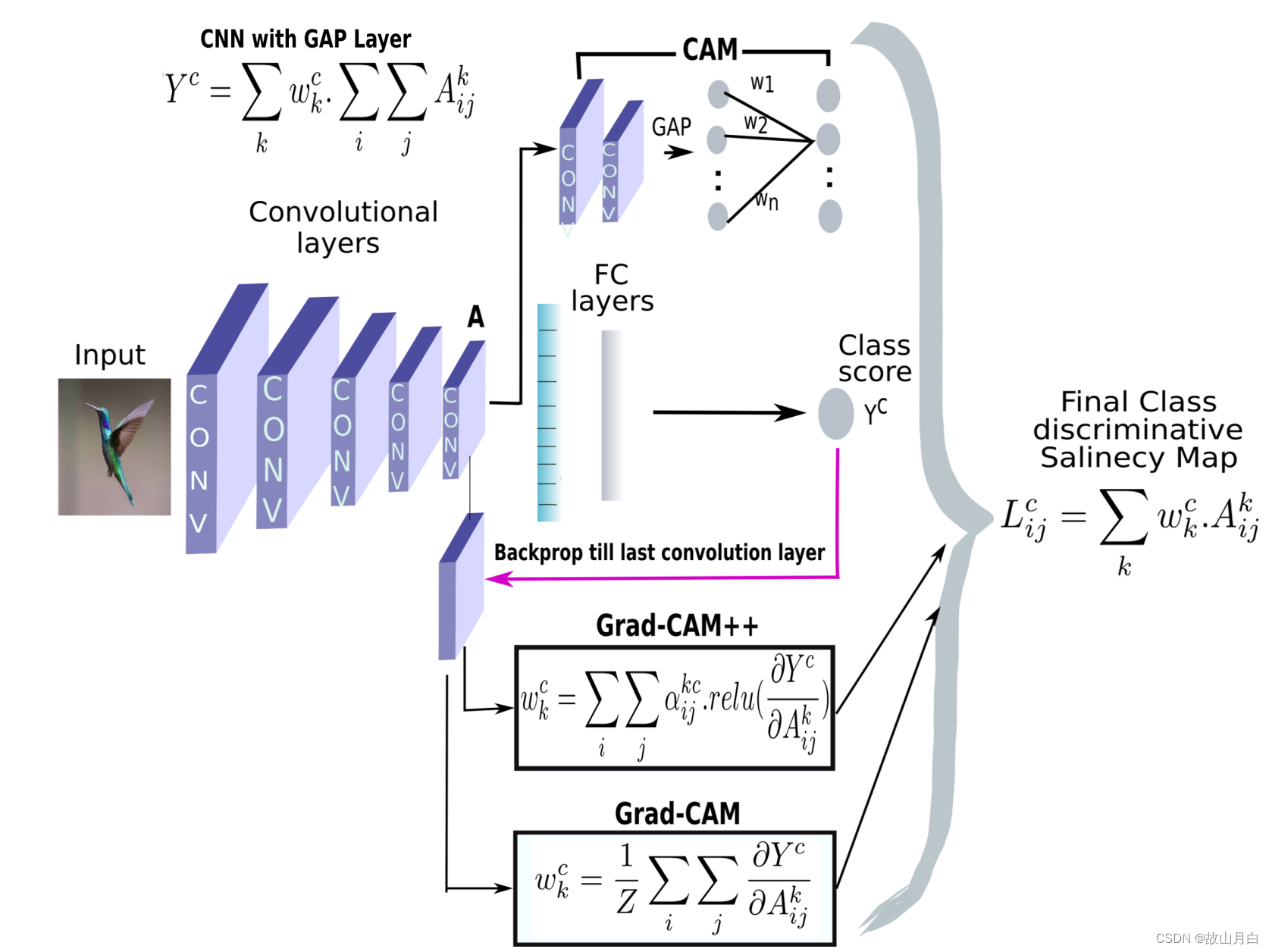
原理:利用最后一个卷积层的特征图与经过GAP分类后概率最大的神经元权重进行叠加。
图2:解释了在CNN中使用全局平均池化(GAP)生成类激活映射(CAM)的过程:

经过最后一层卷积操作之后,得到的特征图包含多个channel,如图1中的不同颜色的3个channel,也就是在GAP之前所对应的不同的channel特征图,就表示第k个channel的特征图。然后经过GAP处理后每个channel的特征图包含了不同类别的信息,
就表示分类概率最大的神经元(图2黑色神经元)所对应连接的第k个神经元的权重。
Grad-CAM
Grad-CAM的前身是 CAM,CAM 的基本的思想是求分类网络某一类别得分对高维特征图 (卷积层的输出) 的偏导数,从而可以得到该高维特征图每个通道对该类别得分的权值;而高维特征图的激活信息 (正值) 又代表了卷积神经网络的所感兴趣的信息,加权后使用热力图呈现得到 CAM。
原理:Grad-CAM的关键思想是将输出类别的梯度(相对于特定卷积层的输出)与该层的输出相乘,然后取平均,得到一个“粗糙”的热力图。这个热力图可以被放大并叠加到原始图像上,以显示模型在分类时最关注的区域。
具体步骤如下:
- 选择网络的最后一个卷积层,因为它既包含了高级特征,也保留了空间信息。
- 前向传播图像到网络,得到你想解释的类别的得分。
- 计算此得分相对于我们选择的卷积层输出的梯度。
- 对于该卷积层的每个通道,使用上述梯度的全局平均值对该通道进行加权。
- 结果是一个与卷积层的空间维度相同的加权热力图。
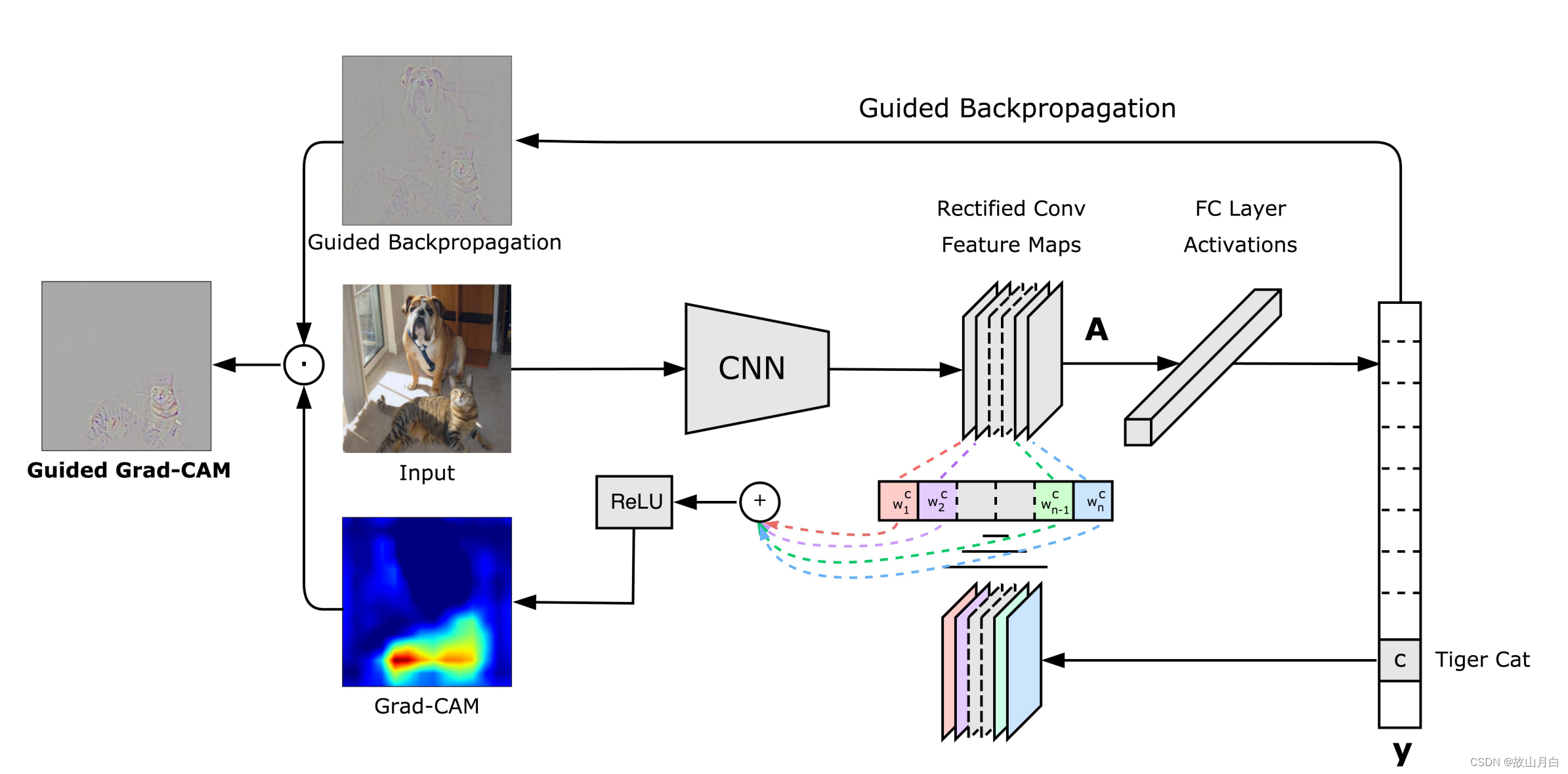
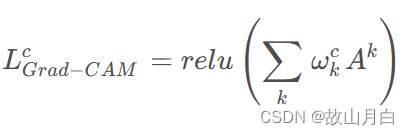
因为热力图关心的是对分类有正面影响的特征,所以在线性组合的技术上加上了ReLU,以移除负值 。

第 k 个特征图对应于类别 c 的权重,
表示:第 k 个特征图,
表示特征图的像素个数,
表示: 第c类得分的梯度,
表示: 第 k个特征图中坐标( i , j )位置处的像素值;
Grad-CAM代码:
import torch
import cv2
import torch.nn.functional as F
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
from PIL import Imageclass GradCAM:def __init__(self, model, target_layer):self.model = model # 要进行Grad-CAM处理的模型self.target_layer = target_layer # 要进行特征可视化的目标层self.feature_maps = None # 存储特征图self.gradients = None # 存储梯度# 为目标层添加钩子,以保存输出和梯度target_layer.register_forward_hook(self.save_feature_maps)target_layer.register_backward_hook(self.save_gradients)def save_feature_maps(self, module, input, output):"""保存特征图"""self.feature_maps = output.detach()def save_gradients(self, module, grad_input, grad_output):"""保存梯度"""self.gradients = grad_output[0].detach()def generate_cam(self, image, class_idx=None):"""生成CAM热力图"""# 将模型设置为评估模式self.model.eval()# 正向传播output = self.model(image)if class_idx is None:class_idx = torch.argmax(output).item()# 清空所有梯度self.model.zero_grad()# 对目标类进行反向传播one_hot = torch.zeros((1, output.size()[-1]), dtype=torch.float32)one_hot[0][class_idx] = 1output.backward(gradient=one_hot.cuda(), retain_graph=True)# 获取平均梯度和特征图pooled_gradients = torch.mean(self.gradients, dim=[0, 2, 3])activation = self.feature_maps.squeeze(0)for i in range(activation.size(0)):activation[i, :, :] *= pooled_gradients[i]# 创建热力图heatmap = torch.mean(activation, dim=0).squeeze().cpu().numpy()heatmap = np.maximum(heatmap, 0)heatmap /= torch.max(heatmap)heatmap = cv2.resize(heatmap, (image.size(3), image.size(2)))heatmap = np.uint8(255 * heatmap)heatmap = cv2.applyColorMap(heatmap, cv2.COLORMAP_JET)# 将热力图叠加到原始图像上original_image = self.unprocess_image(image.squeeze().cpu().numpy())superimposed_img = heatmap * 0.4 + original_imagesuperimposed_img = np.clip(superimposed_img, 0, 255).astype(np.uint8)return heatmap, superimposed_imgdef unprocess_image(self, image):"""反预处理图像,将其转回原始图像"""mean = np.array([0.485, 0.456, 0.406])std = np.array([0.229, 0.224, 0.225])image = (((image.transpose(1, 2, 0) * std) + mean) * 255).astype(np.uint8)return imagedef visualize_gradcam(model, input_image_path, target_layer):"""可视化Grad-CAM热力图"""# 加载图像img = Image.open(input_image_path)preprocess = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])])input_tensor = preprocess(img).unsqueeze(0).cuda()# 创建GradCAMgradcam = GradCAM(model, target_layer)heatmap, result = gradcam.generate_cam(input_tensor)# 显示图像和热力图plt.figure(figsize=(10,10))plt.subplot(1,2,1)plt.imshow(heatmap)plt.title('热力图')plt.axis('off')plt.subplot(1,2,2)plt.imshow(result)plt.title('叠加后的图像')plt.axis('off')plt.show()# 以下是示例代码,显示如何使用上述代码。
# 首先,你需要加载你的模型和权重。
# model = resnet20()
# model.load_state_dict(torch.load("path_to_your_weights.pth"))
# model.to('cuda')# 然后,调用`visualize_gradcam`函数来查看结果。
# visualize_gradcam(model, "path_to_your_input_image.jpg", model.layer3[-1])Grad-CAM++