欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 技术交流认准下方 CSDN 官方提供的联系方式
文章目录
- 概要
- 一、总体设计开发流程
- 二、机械结构设计与研究
- 3.1 机械系统总体设计
- 3.1.1 太阳能板折叠传动
- 三、太阳能自动跟踪系统硬件设计
- 仿真图
- 四、结论
概要
本论文的课题即为研究电动汽车如何利用太阳能板自动跟踪阳光解决传统太阳能板太阳能利用率低的问题。在汽车使用人群中,上班族占有很大的比例,在晴天长时间停泊时能够利用太阳能对电池能源进行补充是一个有着深远意义的课题。目前,如何最大效率地利用太阳能成为了大家探索的问题,由于地球的自转和公转,太阳与地球的两者的相对位置是持续变化的,本论文通过单片机控制太阳能板对阳光进行精准捕捉,使得太阳能入射光线能够在大部分时间内垂直太阳能板,以提高太阳能利用效率,大大提高了电能转化效率。综上所述,研发出一套在电动汽车上能够实现自动对阳光进行精准定位及捕捉的装置,对提高太阳能利用率、环境保护有着重大深远的意义。
一、总体设计开发流程
本课题的开发设计,总体分为3个部分,由机械机构、硬件和软件三个部分组成,机械部分关于机械结构展开折叠、电动推杆高度角的追踪和云台电机对方位角的追踪,硬件部分包括选用硬件类型,电路设计,以及电路仿真,软件部分包括系统控制总流程图,主程序编写以及子程序编写,程序编写完成后,编译输入硬件电路,仿真,观察电路显示状况,观察是否达标。
二、机械结构设计与研究
3.1 机械系统总体设计
对于机械系统的设计,本课题由于是在汽车上加载的太阳能自动跟踪系统机构,因此应该保证机械结构设计结构方便,轻量,易拆卸的主要功能,同时,机械结构是确保方案能正常实现功能的载体,机械系统的好坏直接影响了系统控制的精度。在本次设计中,设计方案抛弃了传统双轴的笨重与控制难度,能保证太阳能板展开面积的同时,解决了控制难的问题。
首先,展开机构由三个步进电机控制,控制太阳能板的展开与收回;太阳高度角的跟踪实现通过电动推杆的伸缩控制;太阳方位角的跟踪实现通过云台电机实现。
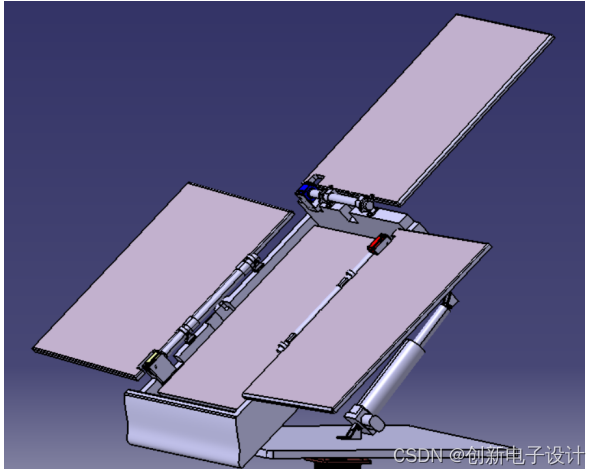
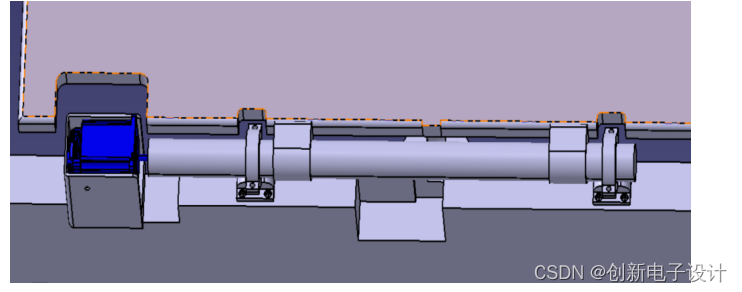
图3.1 装配图
通过CATIA的装配图,可直观看出机械机构的运动状态。
3.1.1 太阳能板折叠传动
本设计关于太阳能板折叠机构的研究,在设计前期,参考了众多太阳能板翻折的案例,与其翻折方法,由于太阳能板的特殊性,研究人员都尽可能增大其光照面积,但又必须考虑其体积影响,由此,延伸了许多种翻折结构;
目前,现代较为常用的翻折结构,一般有:(1)平板型;(2)轴心翻折型;(3)伞型;(4)轴心重叠型等;由于应用场景等限制因素,需自行选择展开方式。
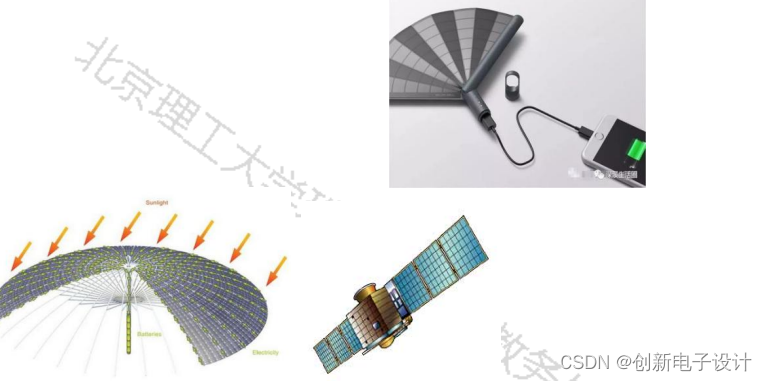
本设计由于应用于常规汽车上,对于体积、重量、外形以及运动方式,都比较严格,所以本设计采用了平板式与轴心翻折式结合的方式进行改良,能很好的控制其空间体积,也能很好的减轻重量负担;本设计通过使用步进电机作为动力源,使用轴承、固定器,连接器、刚性轴等进行传动。
三、太阳能自动跟踪系统硬件设计
本设计是太阳能自动跟踪系统的研究,利用光电追踪作为主要追踪方式,并在扩大太阳能展开面积的方面,使用新型折叠方式,利用平面与翻折的方法结合;在追光系统方面,光电追踪作为如今研究技术较为成熟的追踪方式,技术与达成效果也是相当理想。现在控制领域里的控制系统和控制芯片有很多,它们有着自己的特点和优点以及适合使用场景。本文设计的是车载太阳能板自动追踪系统,所以需要控制系统满足控制稳定、能适应不良环境、体积小、抗电磁干扰能力强、价格合理、使用方便等特点。因此在本系统中,我们最终考虑选用单片机作为控制系统。因为单片机有着结构简单、控制功能强、可靠性高、体积小、价格低、低能耗、对数据的处理能力和运算能力
较强等特点。
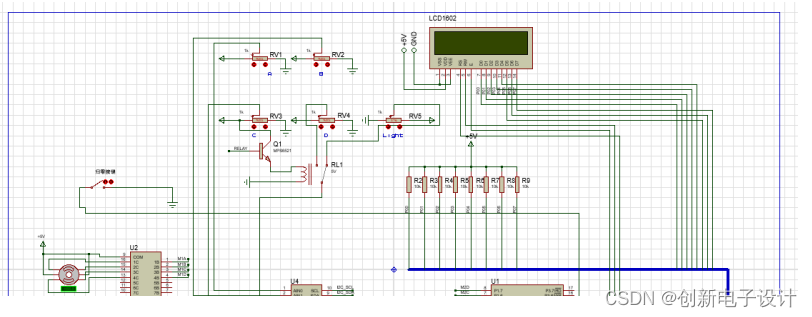
根据设计方案,并且通过对比与参考,选择了一系列符合设计的元器件,在主控模块选择功能作用应用较为广泛的芯片AT89C51;信息采集输入器件选用一个光敏电阻作为检测天气光照强度的器件,另外选用四象限探测器用于判断大致太阳的高度角与方位角;选用PCF8591模块,进行信息采集,也就是A/D转换过程;利用ULN2003作为步进电机的驱动芯片;LCD1602液晶显示模块,对采集器的信息进行显示等。
仿真图
四、结论
本设计利用光敏电阻作为检测当时现场条件光照强度的元器件,在系统中,选用了四象限探测器作为识别太阳位置的检测元器件,探测器通过对比ABCD四个象限的光照感应值,并通过PCF8591实现A/D转换,输入电信号给单片机C51,单片机通过程序逻辑运算,给电机驱动模块传递信号,驱动相应电机,组成光电跟踪系统;由于光电追踪技术发展时间已经有一段时间,因此技术已经相对成熟。由于光电跟踪相对简单而且控制方便,系统在保证精准度的同时,也充分考虑了系统的简化程序。