FPGA与STM32_FSMC总线通信实验
- 内部存储器IP核的参数设置
- 创建IP核
- FPGA代码
- STM32标准库的程序
STM32F407 上自带 FSMC 控制器,通过 FSMC 总线的地址复用模式实现STM32 与 FPGA 之间的通信,FPGA 内部建立 RAM 块,FPGA 桥接 STM32 和 RAM 块,通过 FSMC 总线从 STM32 向 RAM 块中写入数据(数据为 0 到 511),然后读取 RAM出来的数据并进行验证。原理图如下图所示:
内部存储器IP核的参数设置
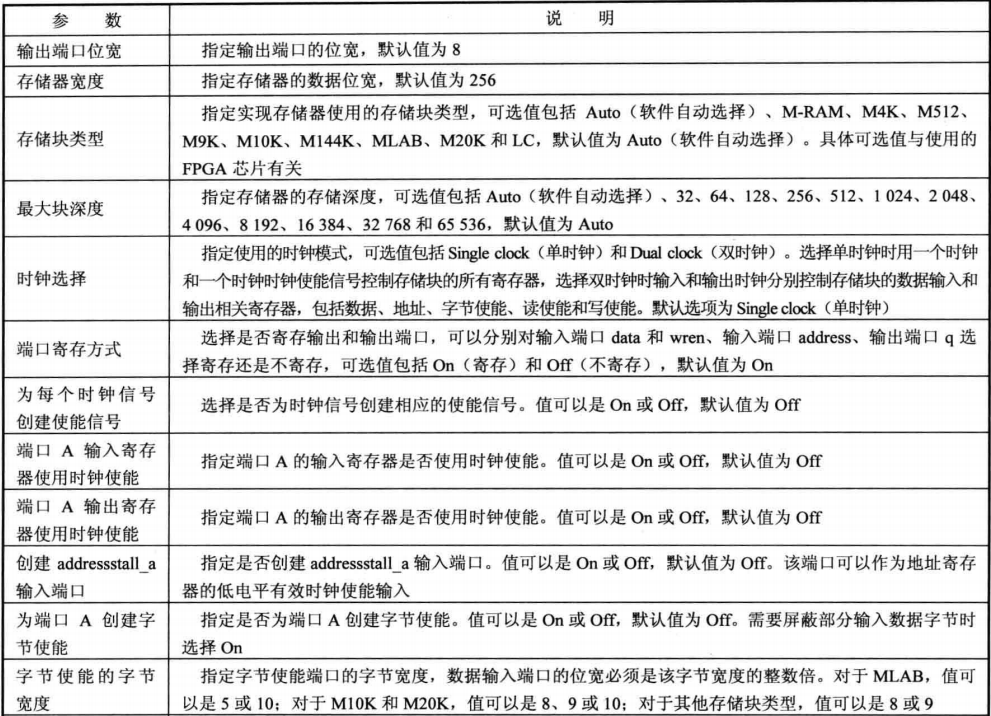
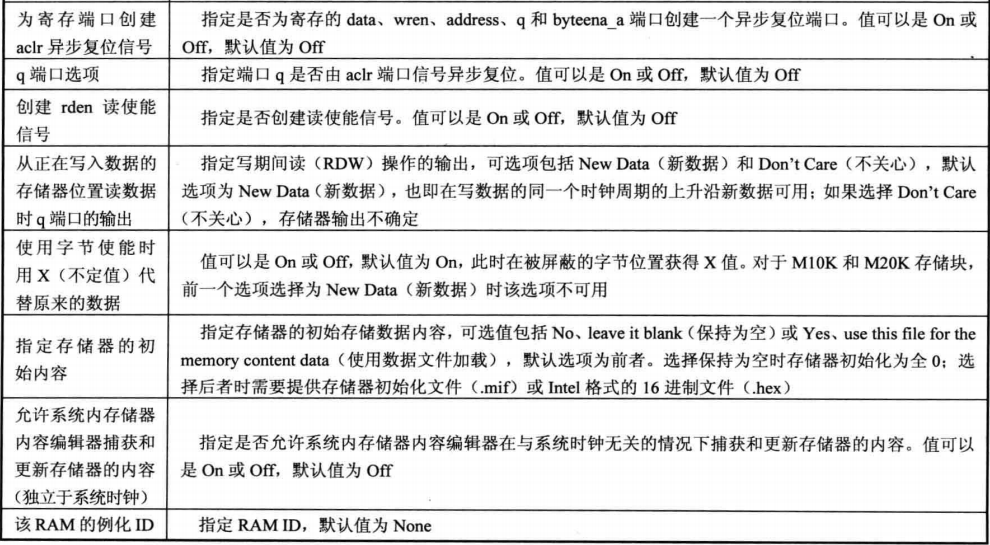
单端口RAM参数介绍
创建IP核
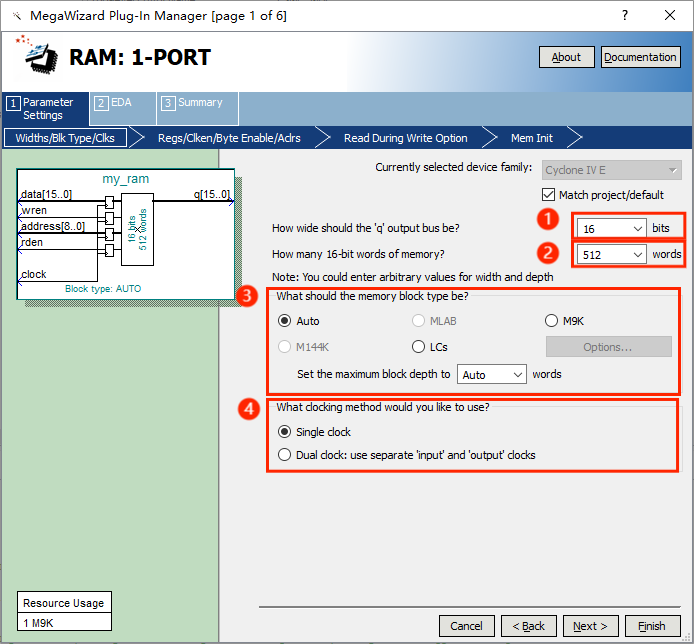
①框是设置输出数据端口的位宽,②框是设置存储器容量的大小,这两个选项大家可根据实际的设计进行设置。这里我们设置数据位宽 16bit,存储容量为 512words,即我们设置的 RAM 的最大存储量为 512 个 16bit 数据。
③框是存储单元类型的选择,这里我们保持 Auto(软件自动选择)即可。
④框中是选择使用的时钟模式,可选择单时钟或双时钟。选择单时钟时:用一个时钟信号控制存储块的所有寄存器。选择双时钟时:输入时钟控制地址寄存器,输出时钟控制数据输出寄存器。大家可根据设计需求进行选择,这里我们选择默认选项 Single clock(单时钟)。
设置完之后点击 Next 进入下一界面:
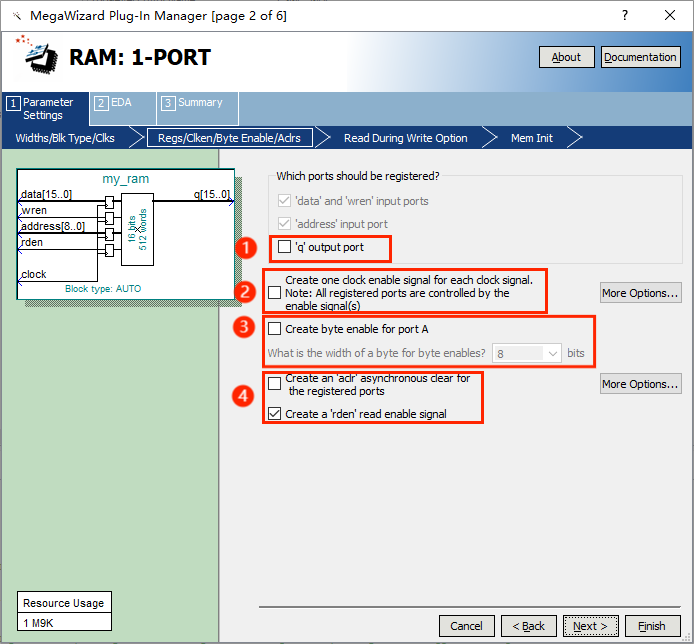
①框是选择是否输出“q”输出寄存器。这里把输出端口的寄存器去掉(如果不去掉的话,就会使输出延迟一拍。如果没有特别的需求的话我们是不需要延迟这一拍的,所以这里我们把它去掉)。
②框是询问我们是否选择为时钟信号创建响应的使能信号,这里我们不需要,不勾选。
③框是询问我们为端口A创建字节使能,这里我们不需要,不勾选。
④框是选择是否创建“aclr”异步复位信号以及是否创建“rden”读使能信号,大家可根据实际的设计需求进行勾选,这里我们把它们都勾选上。设置完之后点击 Next 进入下一界面:
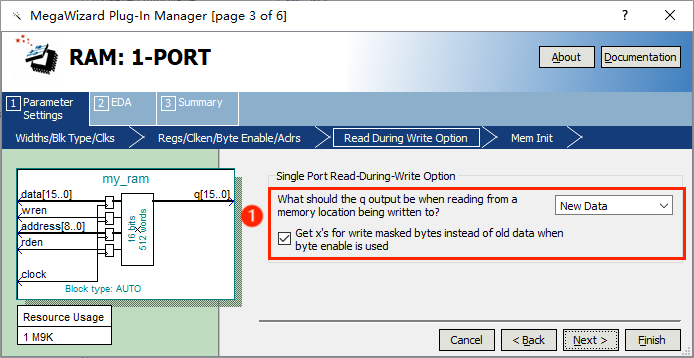
如上图所示,是进行 Read During Write Operation 项配置,选择某个地址即将被写入数据时读该地址的数据输出类型:有 Don’t Care(不关心)、 New Data(写入的新数据)和Old Data(原有数据),我们保持默认的 New Data 即可,也就是说,某个地址将被写入新数据时,同时进行读操作会读出新的数据。点击 Next 进入下一页面:
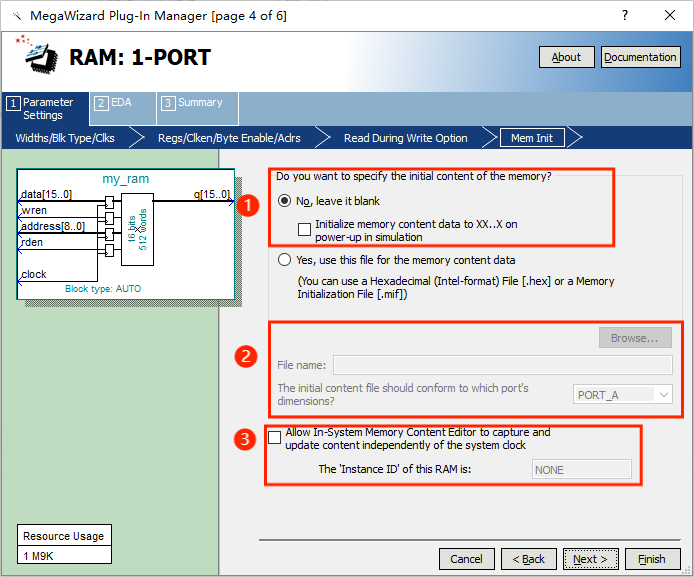
①框是选择是否为存储器配置初始化文件,与 ROM 不同的是,RAM 可以选择不配置初始化文件,这里我们选择不配置初始化文件。
②框是选择是否允许系统内存储器内容编辑器在于与系统时钟无关的情况下捕获和更新存储器的内容,这里我们不勾选。
设置完后点击 Next 进入下一界面:

如上图所示,该界面没有什么要配置的参数,但显示了我们在仿真 ROM IP 核时所需要的 Altera 仿真库,这里提示了我们单独使用第三方仿真工具时需要添加名为“altera_mf”的库。这里保持默认,直接点击“Next”。
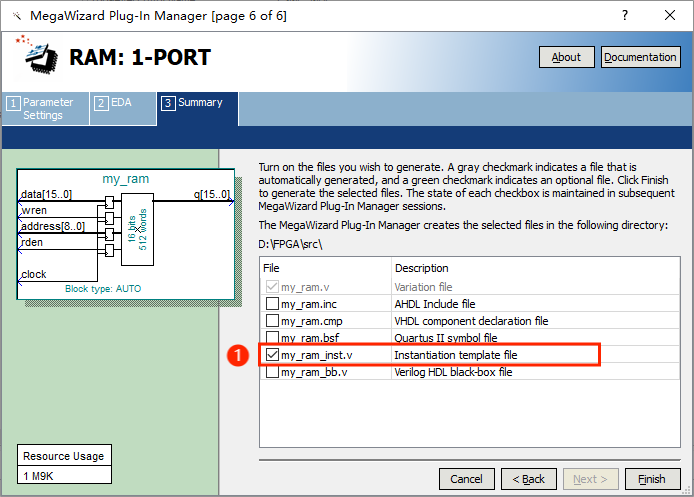
RAM 输出的文件,除了灰色必选文件,默认还勾选上了rom_256x8_bb.v,这里我们去掉 rom_256x8_bb.v 文件,加入my_ram_ints.v(例化模板文件)即可。最后点击“Finish”完成整个 IP 核的创建。接下来 Quartus II 软件会在我们创建的 IP 核文件目录下生成 RAM IP 文件。
FPGA代码
使用RAM IP核构成FSMC,可以从示意图中看出 我们恰好对得上,需要地址线和数据线、读写使能线以及,将IP核的分配到实在的引脚
模块
FSMC模块
module FSMC_Ctrl(ab,db,wrn,rdn,csn,PLL_100M,RST_n,nadv);input [8:0]ab; //地址inout [15:0]db; //数据input wrn; //写使能input rdn; //读使能input csn; //使能input PLL_100M; //时钟input RST_n; //复位input nadv; //复用功能wire rd;wire wr;assign rd = (csn | rdn);//使能和读使能共同有效时assign wr = (csn | wrn);//使能和写使能共同有效时wire [15:0]DB_OUT;assign db = !rd ? DB_OUT : 16'hzzzz;//在读数据的时候,将端口全部设置成高阻态reg wr_clk1,wr_clk2;always @(posedge PLL_100M or negedge RST_n)beginif(!RST_n)beginwr_clk1 <= 1'd1;wr_clk2 <= 1'd1;endelse{wr_clk2,wr_clk1} <= {wr_clk1,wr}; //提取写时钟endwire clk = (!wr_clk2 | !rd);my_ram u1( //ram块例化.address(ab),.clock(clk),.data(db),.wren(!wr),.rden(!rd),.q(DB_OUT),);endmodule
复位模块
//--------------------Timescale------------------------------//
`timescale 1 ns / 1 ps//--------------------RST_Ctrl------------------------//
module RST_Ctrl(input FPGA_CLK, //输入板载晶振FPGA_CLK,25Moutput RST_n //输出全局复位信号);
//--------------------RST_n----------------------------------//reg [3:0] cnt_rst = 4'd0;always @(posedge FPGA_CLK)if (cnt_rst == 4'd10)cnt_rst <= 4'd10;elsecnt_rst <= cnt_rst + 1'd1;assign RST_n = (cnt_rst == 4'd10);//复位信号,10个周期后RST_n为1//--------------------endmodule------------------------------//
endmodule
顶层文件
//-------------------------Timescale----------------------------//
`timescale 1 ns / 1 ps
//--------------------FSMC_SIG---------------------//
module FSMC_INDEP(FPGA_CLK, //输入板载晶振GPGA_CLK,25MFPGA_LEDR,FPGA_LEDG,FPGA_LEDB,WR, //FSMC写信号RD, //FSMC读信号CS0, //FSMC片选A, //FSMC地址总线DB, //FSMC数据总线NADV, //FSMC的NADV);input FPGA_CLK,NADV;input WR,RD,CS0;inout [15:0]DB;input [24:16]A;output FPGA_LEDB,FPGA_LEDG,FPGA_LEDR;assign FPGA_LEDR = 1'd1;assign FPGA_LEDG = 1'd0;assign FPGA_LEDB = 1'd1;
//-------------------------MY_PLL-------------------------------//wire PLL_100M;MY_PLL U1(.inclk0(FPGA_CLK),.c0(PLL_100M));//例化MY_PLL模块,输出50M时钟
//------------------------RST_Ctrl-----------------------------//wire RST_n;RST_Ctrl U2(.FPGA_CLK(FPGA_CLK),.RST_n(RST_n)); //例化RST_Ctrl模块,输出全局复位信号RST_n//-------------------------FSMC_Ctrl ------------------------------//FSMC_Ctrl U3( //FSMC总线测试模块.ab(A[24:16]),.db(DB),.wrn(WR),.rdn(RD),.csn(CS0),.PLL_100M(PLL_100M),.RST_n(RST_n),.nadv(NADV));//------------------------enmodule ---------------------------//endmodule
STM32标准库的程序
fsmc.h
//------------------------define---------------------------//
#ifndef __fsmc_h__
#define __fsmc_h__//---------------------Include files-----------------------////----------------------- Define --------------------------//
#define fpga_write(offset,data) *((volatile unsigned short int *)(0x60000000 + (offset << 17))) = data#define fpga_read(offset) *((volatile unsigned short int *)(0x60000000 + (offset << 17)))//----------------- Typedef -----------------------------//
typedef struct{int (* initialize)(void);
}FSMC_T;//---------------- Extern -------------------------------//extern FSMC_T fsmc;#endif //__fsmc_h__
fsmc.c
/** FILE : fsmc.c* DESCRIPTION : This file is iCore3 fsmc driver.* Author : XiaomaGee@Gmail.com* Copyright :** History* --------------------* Rev : 0.00* Date : 01/03/2016** create.* --------------------*/
//---------------- Include files ------------------------//
#include "..\include\fsmc.h"
#include "..\fwlib\inc\stm32f4xx_rcc.h"
#include "..\fwlib\inc\stm32f4xx_gpio.h"
#include "..\fwlib\inc\stm32f4xx_fsmc.h"//---------------- Function Prototype -------------------//
static int initialize(void);//---------------- Variable -----------------------------//
FSMC_T fsmc = {.initialize = initialize
};//-----------------Function------------------------------//
/** Name : initialize* Description : ---* Author : XiaomaGee.** History* ----------------------* Rev : 0.00* Date : 01/03/2016** create.* ----------------------*/
static int initialize(void)
{GPIO_InitTypeDef GPIO_InitStructure;FSMC_NORSRAMInitTypeDef FSMC_NORSRAMInitStructure;FSMC_NORSRAMTimingInitTypeDef p;//时钟使能RCC_AHB3PeriphClockCmd(RCC_AHB3Periph_FSMC, ENABLE);RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB | RCC_AHB1Periph_GPIOD | RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOG, ENABLE);//IO初始化GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_FSMC);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOD, GPIO_PinSource0, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource1, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource3, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource4, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource5, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource6, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource7, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource8, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource9, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource10, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource11, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource12, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource13, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource14, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOD, GPIO_PinSource15, GPIO_AF_FSMC);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 |GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 |GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;GPIO_Init(GPIOD, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOE, GPIO_PinSource2 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource3 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource4 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource5 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource6 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource7 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource8 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource9 , GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource10, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource11, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource12, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource13, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource14, GPIO_AF_FSMC);GPIO_PinAFConfig(GPIOE, GPIO_PinSource15, GPIO_AF_FSMC);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10 | GPIO_Pin_11 |GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;GPIO_Init(GPIOE, &GPIO_InitStructure);GPIO_PinAFConfig(GPIOG, GPIO_PinSource13, GPIO_AF_FSMC);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_Init(GPIOG, &GPIO_InitStructure);//FSMC初始化p.FSMC_AddressSetupTime = 1;p.FSMC_AddressHoldTime = 0;p.FSMC_DataSetupTime = 4;p.FSMC_BusTurnAroundDuration = 0;p.FSMC_CLKDivision = 0;p.FSMC_DataLatency = 0;p.FSMC_AccessMode = FSMC_AccessMode_A;FSMC_NORSRAMInitStructure.FSMC_Bank = FSMC_Bank1_NORSRAM1;FSMC_NORSRAMInitStructure.FSMC_DataAddressMux = FSMC_DataAddressMux_Enable;FSMC_NORSRAMInitStructure.FSMC_MemoryType = FSMC_MemoryType_SRAM;FSMC_NORSRAMInitStructure.FSMC_MemoryDataWidth = FSMC_MemoryDataWidth_16b;FSMC_NORSRAMInitStructure.FSMC_BurstAccessMode = FSMC_BurstAccessMode_Disable;FSMC_NORSRAMInitStructure.FSMC_AsynchronousWait = FSMC_AsynchronousWait_Disable; FSMC_NORSRAMInitStructure.FSMC_WaitSignalPolarity = FSMC_WaitSignalPolarity_Low;FSMC_NORSRAMInitStructure.FSMC_WrapMode = FSMC_WrapMode_Disable;FSMC_NORSRAMInitStructure.FSMC_WaitSignalActive = FSMC_WaitSignalActive_BeforeWaitState;FSMC_NORSRAMInitStructure.FSMC_WriteOperation = FSMC_WriteOperation_Enable;FSMC_NORSRAMInitStructure.FSMC_WaitSignal = FSMC_WaitSignal_Disable;FSMC_NORSRAMInitStructure.FSMC_ExtendedMode = FSMC_ExtendedMode_Disable;FSMC_NORSRAMInitStructure.FSMC_WriteBurst = FSMC_WriteBurst_Disable;FSMC_NORSRAMInitStructure.FSMC_ReadWriteTimingStruct = &p;FSMC_NORSRAMInitStructure.FSMC_WriteTimingStruct = &p;FSMC_NORSRAMInit(&FSMC_NORSRAMInitStructure); //FSMC Bank1_SRAM1 Bank使能FSMC_NORSRAMCmd(FSMC_Bank1_NORSRAM1, ENABLE); return 0;
}led.c
//--------------------------- Include ---------------------------//
#include "..\include\led.h"
#include "..\fwlib\inc\stm32f4xx_gpio.h"
#include "..\fwlib\inc\stm32f4xx_rcc.h"//--------------------- Function Prototype ----------------------//
static int initialize(void);//--------------------------- Variable --------------------------//
LED_T led = {.initialize = initialize
};
//--------------------------- Function --------------------------//
/** Name : initialize* Description : ---* Author : ysloveivy.** History* --------------------* Rev : 0.00* Date : 01/03/2016* * create.* --------------------*/
static int initialize(void)
{GPIO_InitTypeDef GPIO_uInitStructure;//LED IO初始化RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOI,ENABLE);GPIO_uInitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7; //设置连接三色LED灯的IO端口GPIO_uInitStructure.GPIO_Mode = GPIO_Mode_OUT; //设置端口为输出模式GPIO_uInitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出GPIO_uInitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉GPIO_uInitStructure.GPIO_Speed = GPIO_Speed_100MHz; //设置速度为第三级GPIO_Init(GPIOI,&GPIO_uInitStructure);//PI5、PI6、PI7接三色LED灯,PI5、PI6、PI7置高电位,灯熄灭GPIO_SetBits(GPIOI,GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7);return 0;
}
led.h
#ifndef __led_h__
#define __led_h__//--------------------------- Define ---------------------------//
//红灯<----->PI5
#define LED_RED_OFF GPIO_SetBits(GPIOI,GPIO_Pin_5)
#define LED_RED_ON GPIO_ResetBits(GPIOI,GPIO_Pin_5)
//绿灯<----->PI6
#define LED_GREEN_OFF GPIO_SetBits(GPIOI,GPIO_Pin_6)
#define LED_GREEN_ON GPIO_ResetBits(GPIOI,GPIO_Pin_6)
//蓝灯<----->PI7
#define LED_BLUE_OFF GPIO_SetBits(GPIOI,GPIO_Pin_7)
#define LED_BLUE_ON GPIO_ResetBits(GPIOI,GPIO_Pin_7)//----------------------- Include files ------------------------////-------------------------- Typedef----------------------------//
typedef struct {int (* initialize)(void);
}LED_T;//--------------------------- Extern ---------------------------//
extern LED_T led;#endif //__led_h__
主函数
int main(void)
{int i;unsigned short int fsmc_read_data;/*初始化*/led.initialize();fsmc.initialize();LED_GREEN_ON;/*绿色led亮,表示测试正常红色led亮,表示测试失败,测试结束*/while(1){for(i = 0;i < 512;i++){fpga_write(i,i); //向FPGA写入数据} for(i = 0;i < 512;i++){fsmc_read_data = fpga_read(i); //从FPGA读数据if(fsmc_read_data != i){LED_GREEN_OFF;LED_RED_ON;while(1);} }}
}
复用模式说明
地址和数据线复用时,NADV是访问地址和数据的区别信号,你只需要配合时序参数,芯片会自动识别的。