STM32
- 1 CMSIS
- 1.1 概述
- 1.2 CMSIS 应用程序文件描述
- 2 库
- 2.1 简介
- 2.2 标准外设库(standrd Peripheral Libraries)
- 2.3 HAL 库
- 2.3.1 目录结构
- 2.3.2 HAL库API函数和变量的命名规则
- 2.3.3 HAL库对寄存器位操作的相关宏定义
- 2.3.4 HAL库回调函数
- 2.3.5 HAL使用注意事项
- 2.3 LL 库
- 3 STM32Cube
- 3.1 概述
- 3.2 固件包文件夹简介
- 3.3 STM32CubeMX
- 3.3.1 概述
- 4 STM32CubeIDE
- 5
1 CMSIS
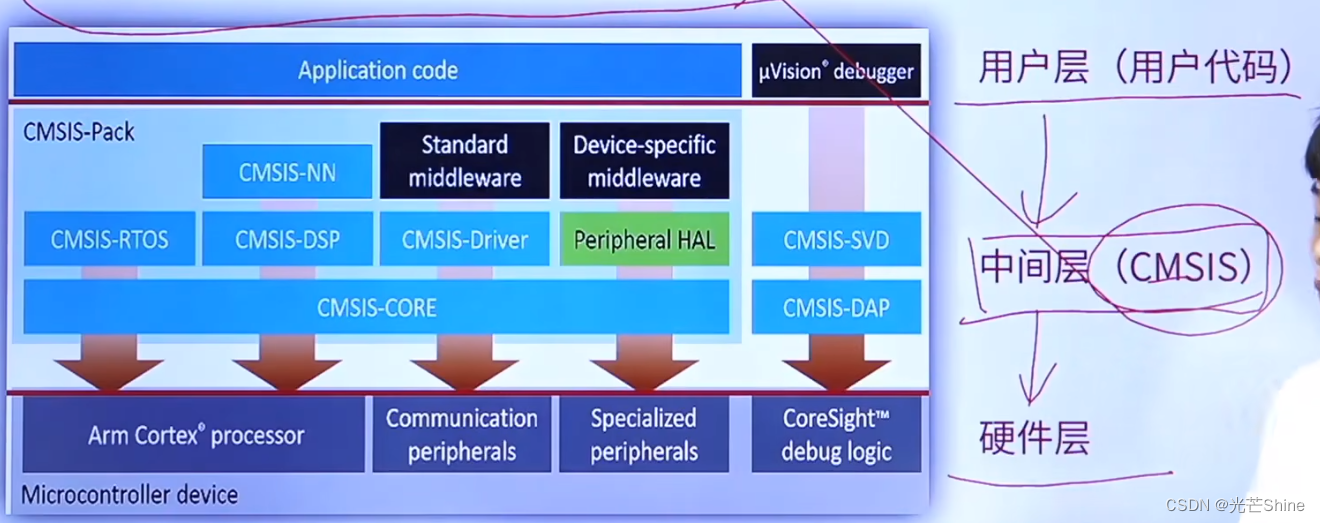
1.1 概述
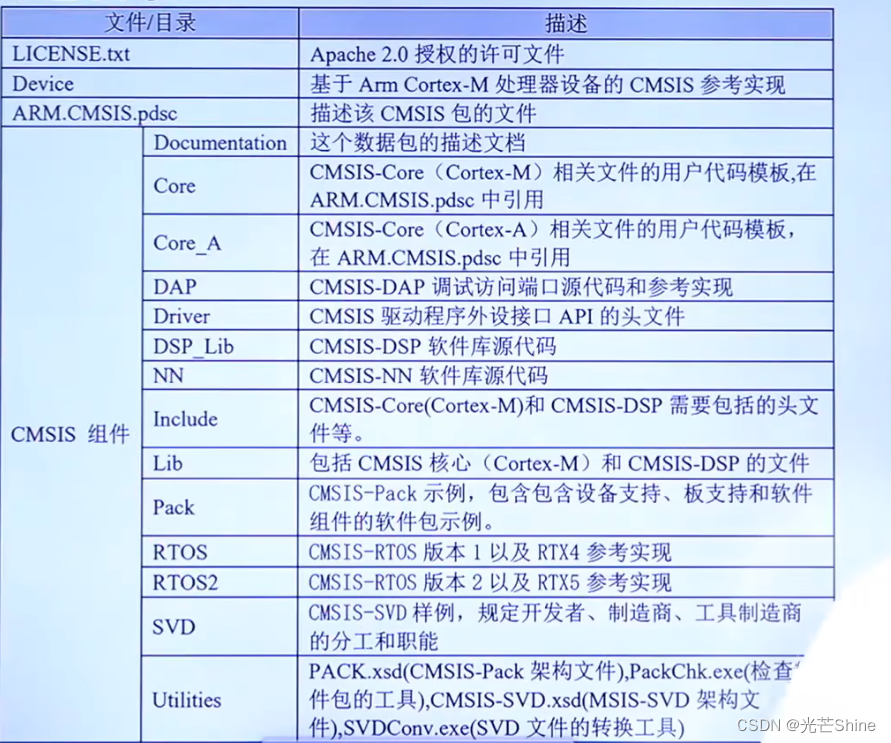
ARM Cortex™ 微控制器软件接口标准(CMSIS:Cortex Microcontroller Software Interface Standard) 是 Cortex-M 处理器系列的与供应商无关的硬件抽象层(英文原文为:a vendor-independent hardware abstraction layer for the Cortex-M processor series and defines generic tool interfaces–来自ARM官方定义)。 使用CMSIS,可以为处理器和外设实现一致且简单的软件接口,从而简化软件的重用、缩短微控制器新开发人员的学习过程,并缩短新设备的上市时间
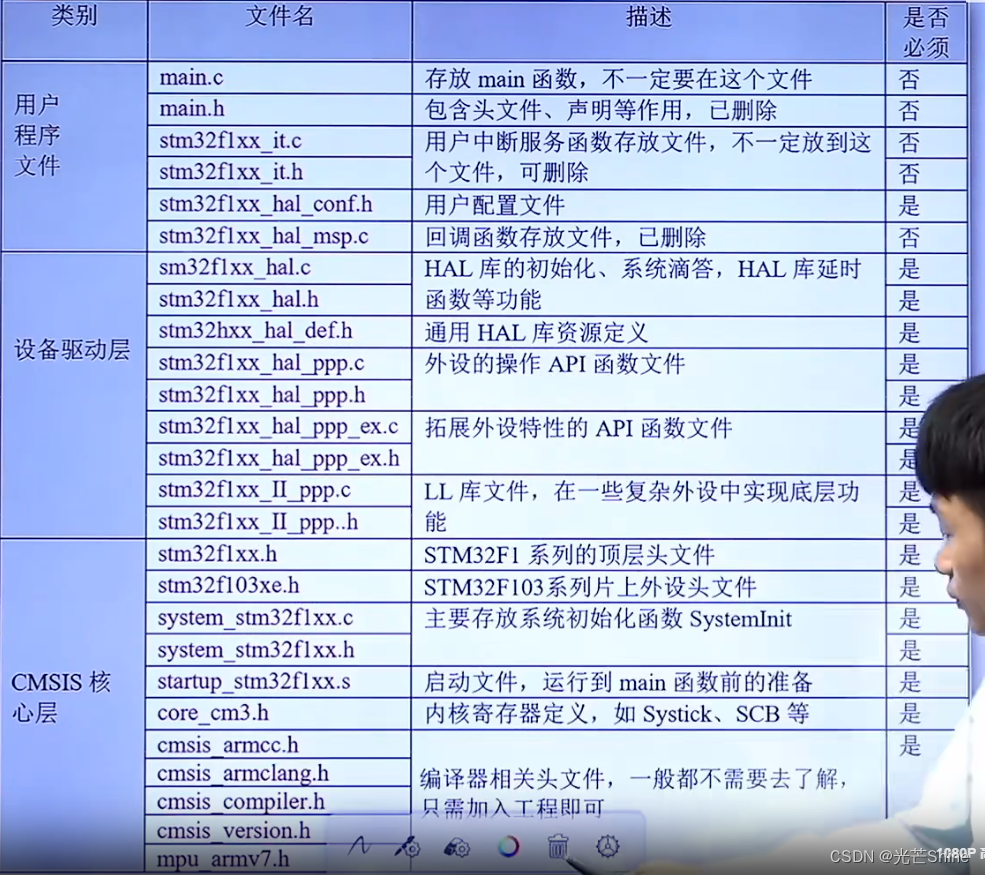
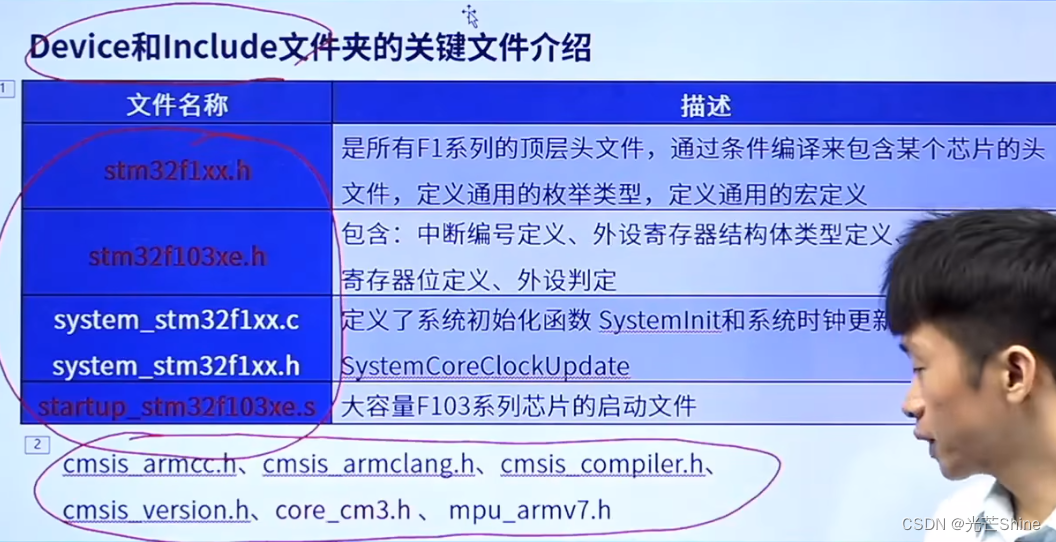
1.2 CMSIS 应用程序文件描述
2 库
2.1 简介
st为方便用户开发stm32芯片提供三种库:
1.标准外设库(standrd Peripheral Libraries)
2.HAL库(硬件抽象层)
3.LL库 Low Layer 基本上就是寄存操作的方式实现的库。
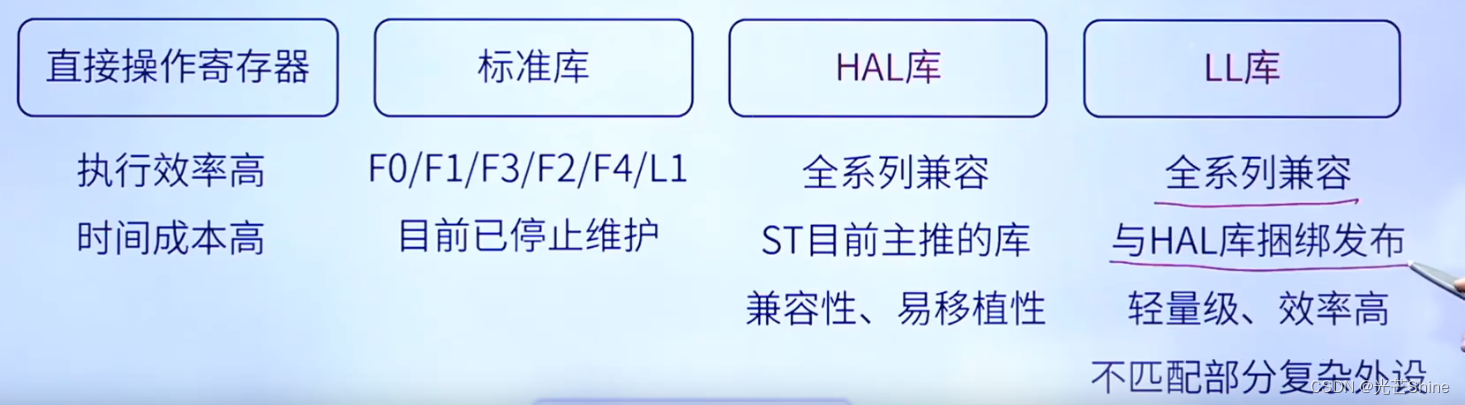
2.2 标准外设库(standrd Peripheral Libraries)
2.3 HAL 库
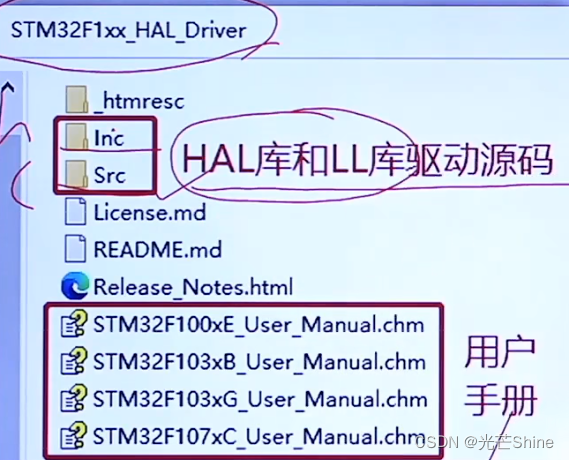
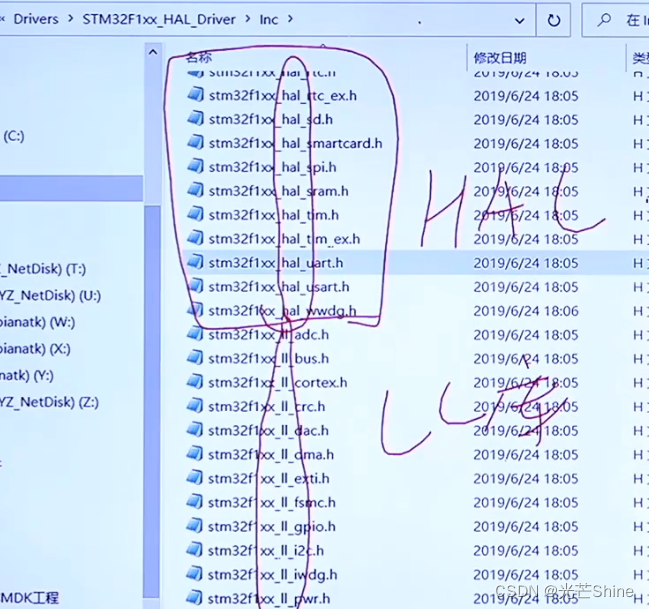
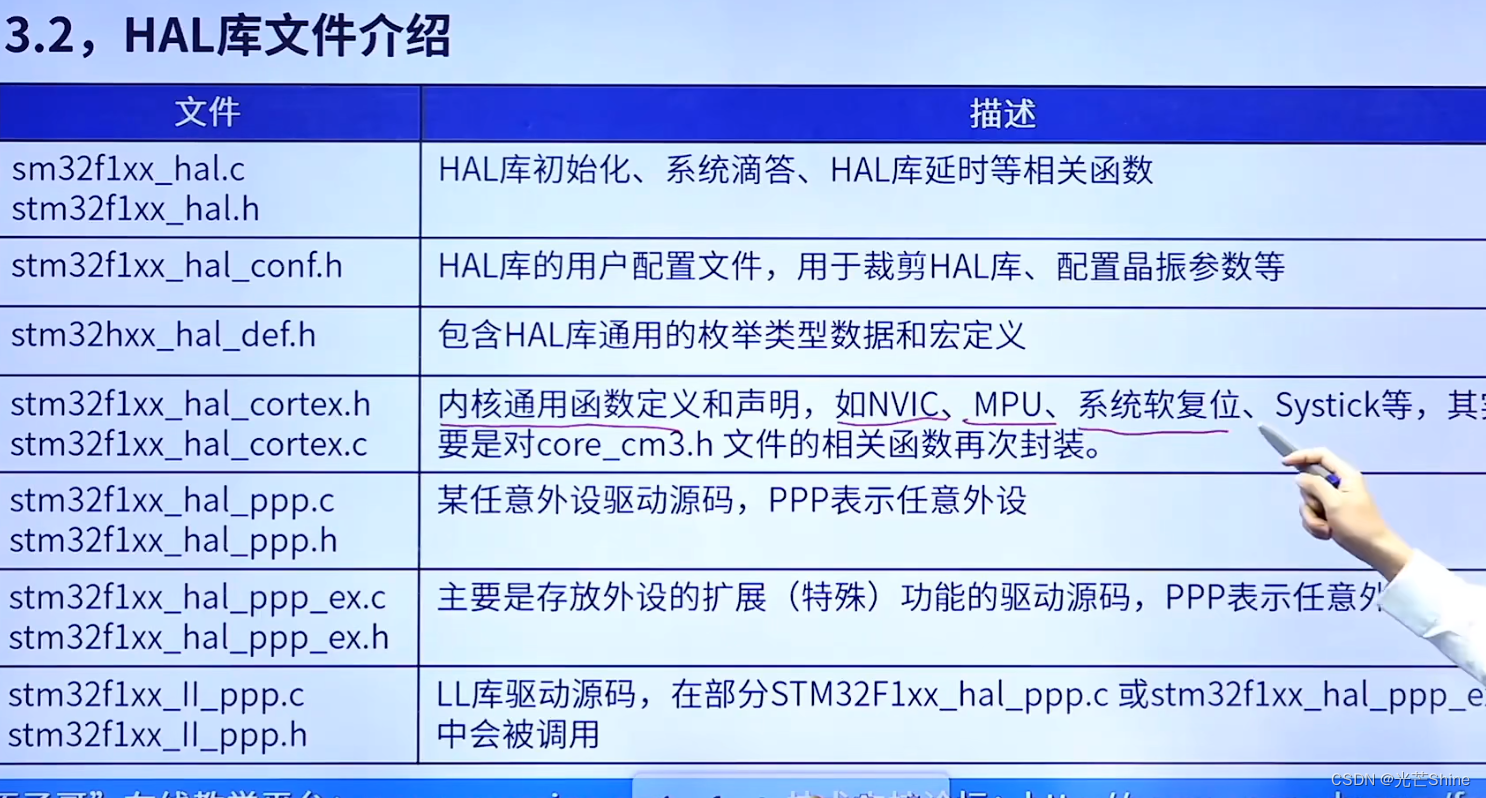
2.3.1 目录结构
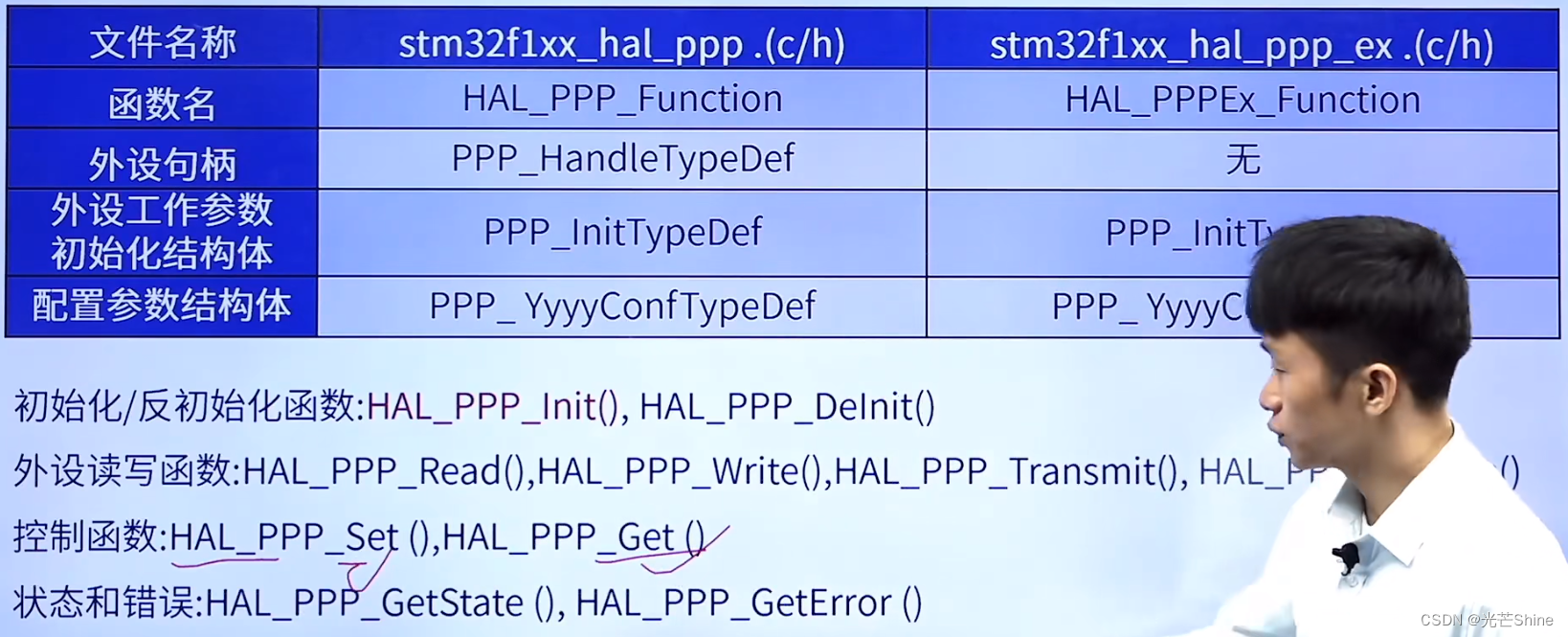
2.3.2 HAL库API函数和变量的命名规则
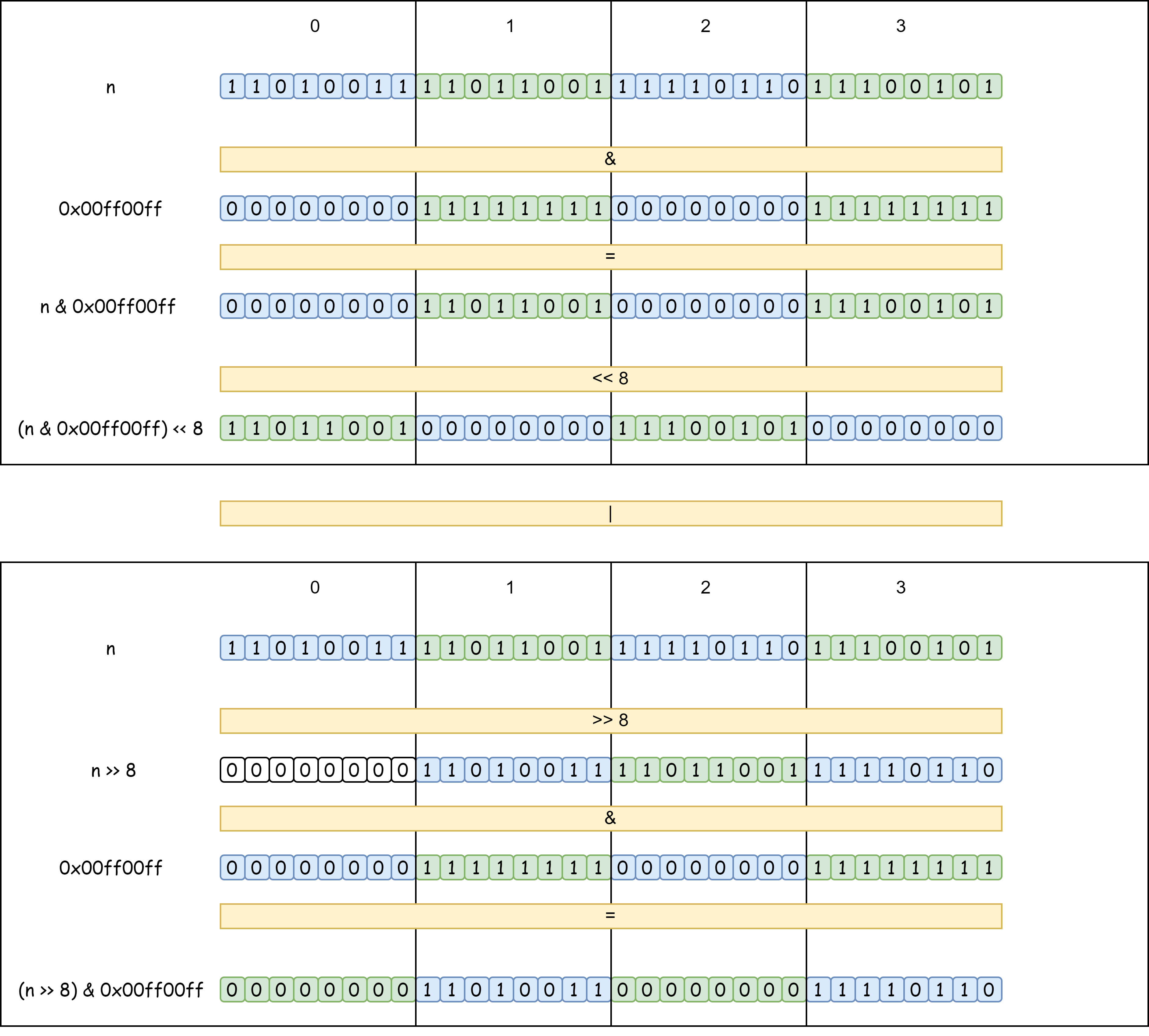
2.3.3 HAL库对寄存器位操作的相关宏定义

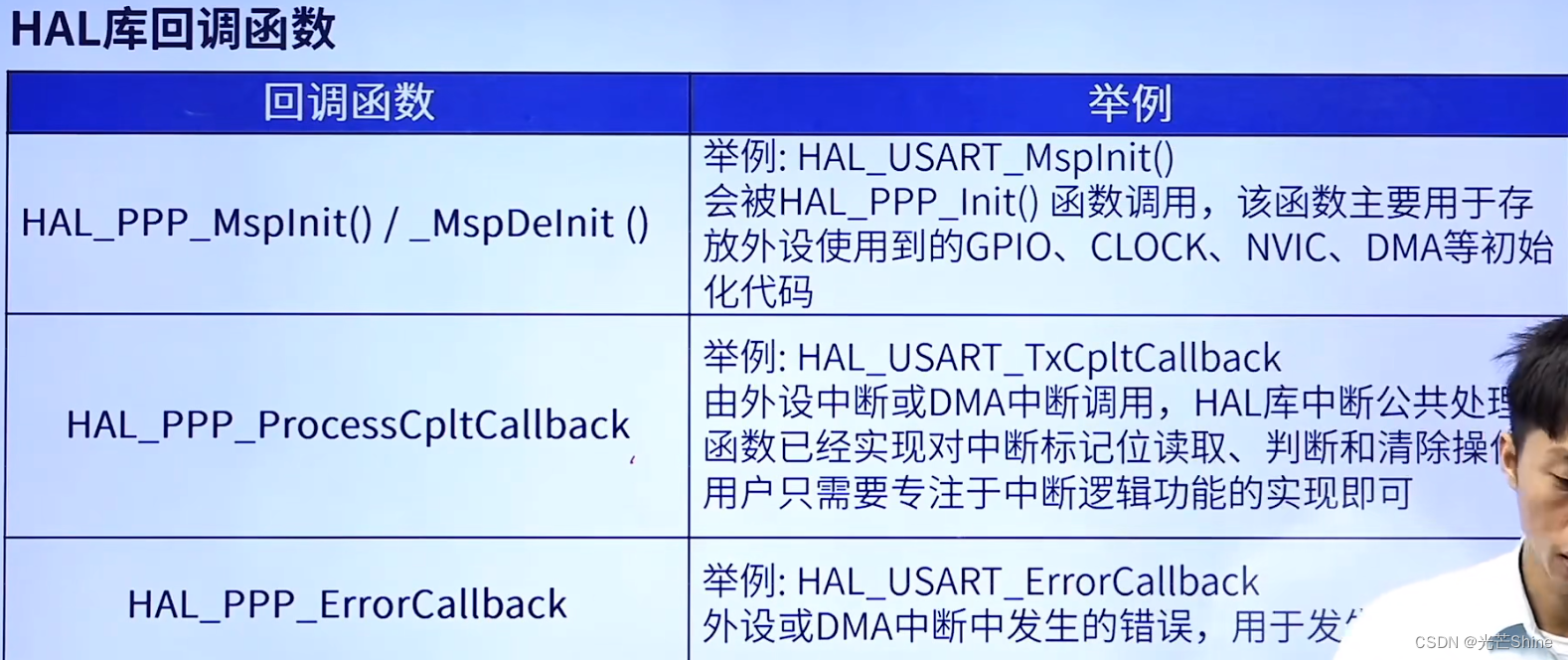
2.3.4 HAL库回调函数
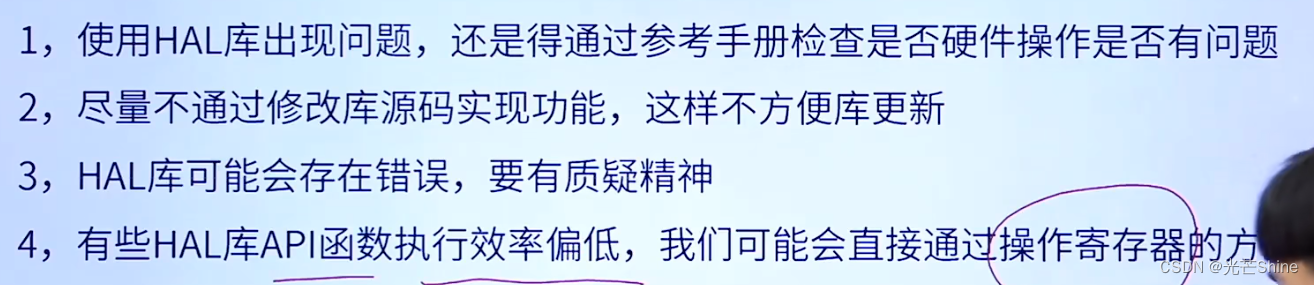
2.3.5 HAL使用注意事项
2.3 LL 库
3 STM32Cube
3.1 概述
STM32Cube是ST公司开发的一套生态系统,致力于使STM32的开发变的更简单,并且100%开源免费。
STM32Cube生态系统包括两大部分:
- PC软件工具:STM32CubeMX、STM32CubeIDE、STM32CubeProgrammer、STM32CubeMnitor等
- 软件库:STM32 Embedded Software bricks
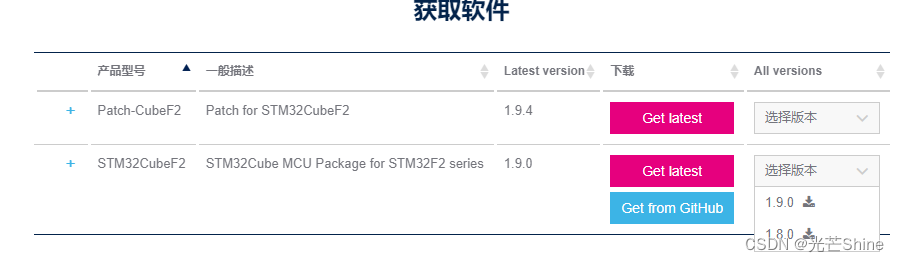
st官方下载
方式一:st官方下载地址: https://www.st.com/zh/embedded-software/stm32cubef2.html
方式二:st官方搜索STM32Cube

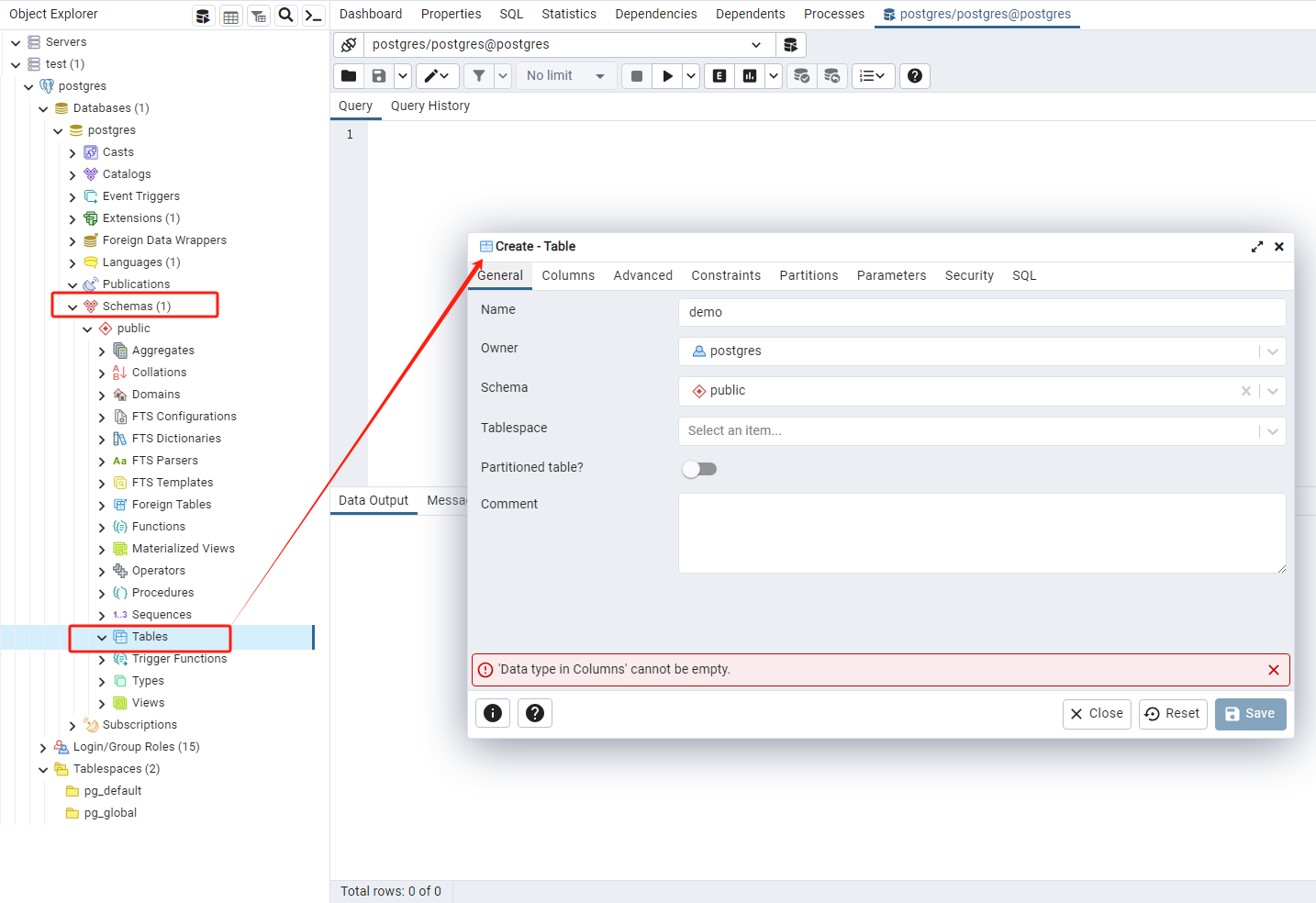
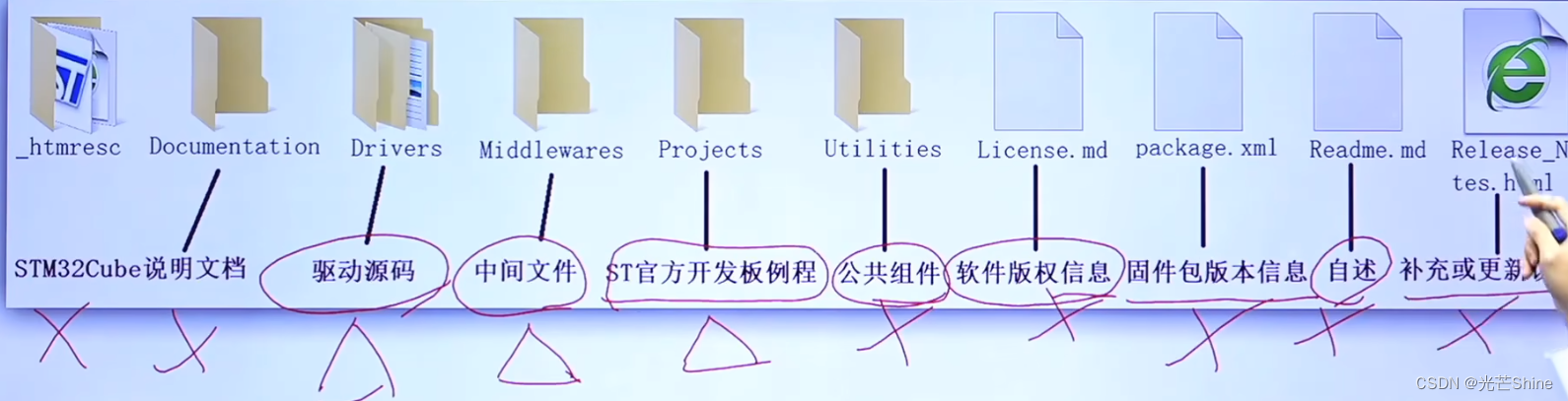
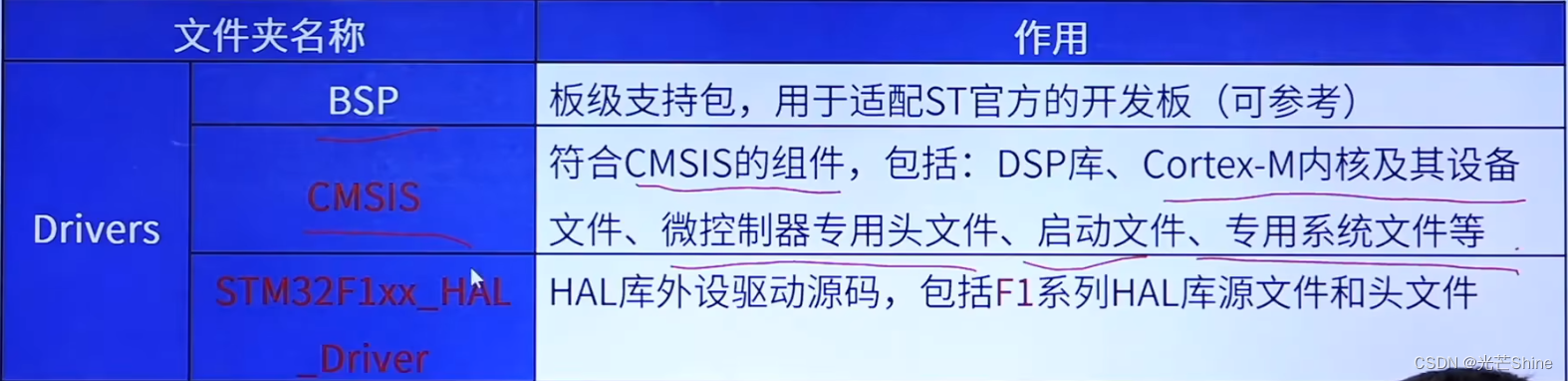
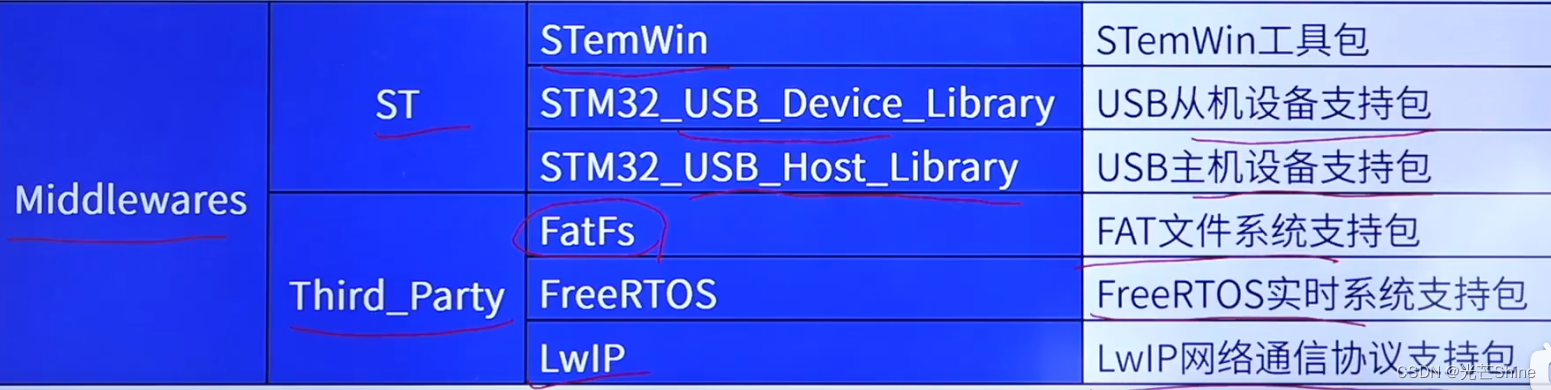
3.2 固件包文件夹简介
3.3 STM32CubeMX
下载地址: https://www.st.com/en/development-tools/stm32cubemx.html
3.3.1 概述
STM32CubeMX 是用于 32 位 ARM Cortex STM32 微控制器的图形工具。它允许对 STM32 微控制器和微处理器进行非常简单的配置,生成初始化 C 代码,还可以通过一步一步的操作为 Arm Cortex-M 内核或 Arm Cortex-A core 生成部分 Linux 设备树。它是 STMCube 生态系统的一部分,且可以作为独立应用程序或作为 Eclipse 插件集成在开发环境(STM32CubeIDE)中。
STM32CubeMX 适用于任何STM32设备的配置工具 该工具用Java编写,所以可以在Windows、Linux、Mac上运行,它可以使用户通过图形用户界面对微控制器进行配置,然后为Cortex-M内核生成初始化C代码,或者为Cortex-A内核生成Linux设备树源(下面两张图对STM32CubeMX的作用作以诠释):
4 STM32CubeIDE
STM32CubeIDE 集成开发环境 该工具是基于Eclipse+GNU C/C++工具链的,除了基本的编辑和编译功能,还包括代码编译报告功能和高级调试功能,另外,该IDE还集成了CubeMX。