1.数据通信的基本知识
1.串行/并行通信

2.单工/半双工/全双工通信
类似于【广播 对讲 电话】
不是有两根线就是全双工,而是输入和输出都有对应的数据线。

3.同步/异步通信
区分同步/异步通信的根本:判断是否有时钟信号(时钟线)。如果有时钟线则是同步通信,如果没有时钟线则是异步通信。

4.波特率 VS 比特率

5.常见的串行通信接口

2.串口(RS-232)
1.什么是串口
实际上就是按位来对数据进行发送和接收。

2.RS232电平和CMOS/TTL电平对比

3.设备间的RS232通信示意图
MAX323:将RS232电平---》TTL/CMOS电平

4.STM32串口与电脑USB口通信示意图
USB/串口转换电路CH340C:USB电平---》TTL/CMOS电平

5.RS232异步通信协议
注意:异步通信协议中是没有使用到时钟线(SCLK)

3.STM32USART
1.STM32USART简介
USART虽然是同步和异步都可以进行使用,但是我们大多数情况下使用的都是异步通信。

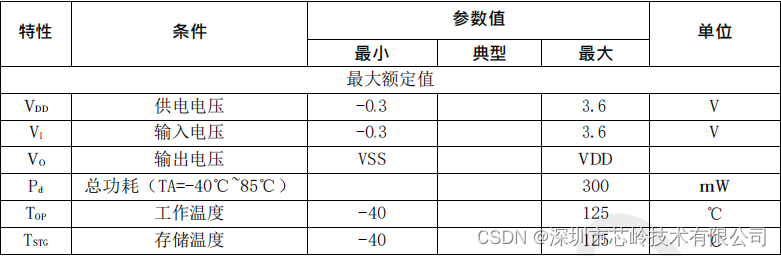
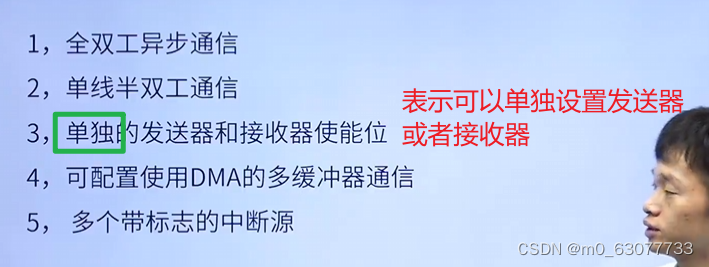
2.STM32USART主要特征
3.在选型手册中查看USART/UART对应的引脚定义

4.STM32F1的USART框图
1.引脚说明

2.接收/发送数据的存放/处理位置
数据要先放在DR寄存器中,然后再通过DR寄存器操作CPU

3.波特率的处理

5.框图简化版


4.设置USART/UART波特率
1.计算公式

baud:波特率是用户自己定义的,然后求出USARTDIV,然后分为整数部分和小数部分,在存储到USART_BRR寄存器

2.波特比率寄存器(BRR)

3.举个例子

4.公式推导
因为小数部分和整数部分都要往左移动4位,所以将整个值*16

5.USART寄存器
1.控制寄存器 1(USART_CR1)


2.控制寄存器 2(USART_CR2)


3. 控制寄存器 3(USART_CR3)


4. 数据寄存器(USART_DR)
1)具体传输多少位取决于寄存器USART_CR1中的位12M【字长】
2)设置好控制和波特率寄存器后,往该寄存器写入数据即可发送,接收数据则读该寄存器

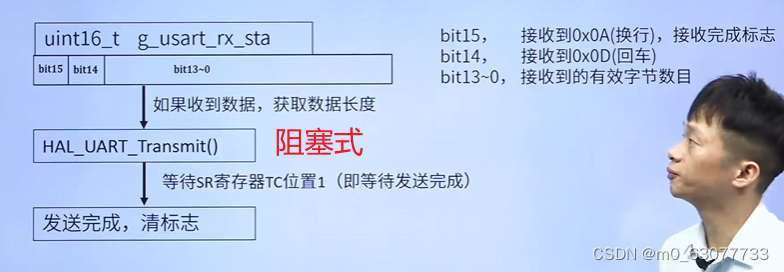
5.状态寄存器(USART_SR)
根据TC位(发送完成位)可以知道能否发数据,根据RXNE位(读数据寄存器非空)知道是否收到数据。

 6.需要配置的时序总结
6.需要配置的时序总结

6.USART/UART异步通信配置步骤

1.HAL_USART_Init
对USART进行初始化


2.HAL_USART_Receive_IT
USART的中断使能函数
这个函数是非阻塞式的,没有执行完也可以出来

3.HAL_USART_Receive
没有开启中断的UASRT
这个函数是阻塞式的,没有执行完不可以出来

7.通过串口接收或者发送一个字符

1.连接注意点


2.原理图分析

3.代码编写

usart_init()
相关的设置参数和开启usart的中断

hal_usart_mspinit()
1)使能USART1和对应的IO时钟
2)初始化IO
3)使能USART1中断,设置NVIC优先级

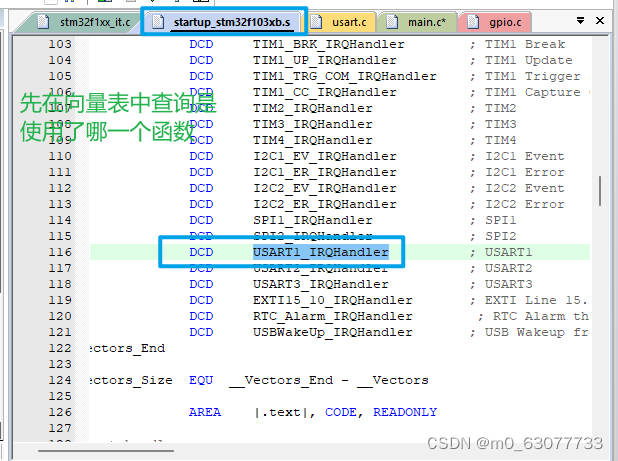
usart1_IRQHandler

中断回调服务函数
2)HAL_UART_iRQHandler()会清除中断

HAL_USART_RxCpltCallback
串口接收数据的回调函数

1.CubeMX和HAL库的串口实战
1、CubeMX中打开并设置串口
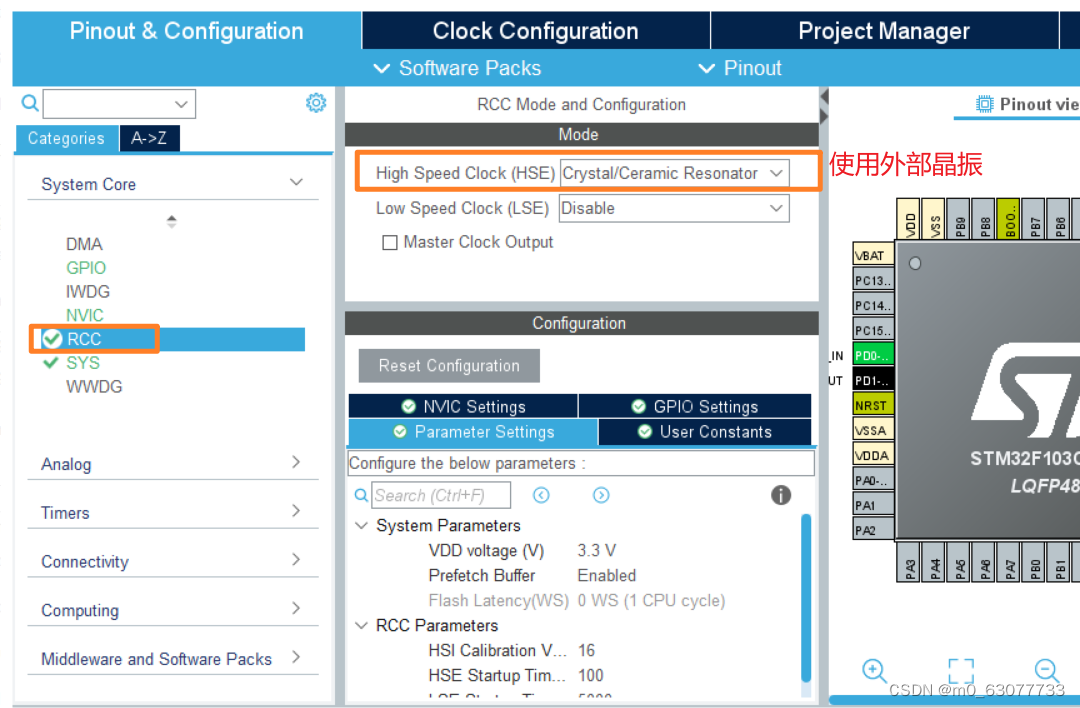
1.设置对应的RCC
2.查看原理图上对应的RX和TX
注意点:我们的串口对应的应该是RX--》TX,TX--》RX
我们要先查看原理图中是否已经帮我们接反了,如果没有则需要我们自己手动接反。


我们使用的STM32F103C8xx直接接入USB口即可
由上面分析可知,我们使能PA9和PA10即可

3.设置相关的USART

4.设置相关的时钟

2、串口操作
(1)阻塞模式串口发送:CPU不做其他事情
MCU的CPU一个字节一个字节的将要发送的内容丢给串口模块,然后看着串口模块将这个字节发送出去,然后CPU再去拿下一个字节来丢给串口模块。直到本次要发送的所有字节全部发完,CPU才会去做其他事。
(2)中断模式串口发送:CPU轮询式查询
MCU的CPU向串口模块丢一个字节,然后串口模块慢慢发,CPU丢完这个字节后会跳出去做其他事情,等串口模块发完这个字节后会生成一个中断,中断会通知CPU过来继续丢下一个字节。
2.源码分析和串口发送的实现
1、阻塞式串口发送/接收
1.1 阻塞式发送:HAL_UART_Transmit(常用)
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
{uint16_t *tmp;uint32_t tickstart = 0U;/* Check that a Tx process is not already ongoing *///查看状态if (huart->gState == HAL_UART_STATE_READY){if ((pData == NULL) || (Size == 0U)){return HAL_ERROR;}/* Process Locked *///将串口模块锁住了,将变量的值设置为"HAL_LOCKED"__HAL_LOCK(huart);huart->ErrorCode = HAL_UART_ERROR_NONE;huart->gState = HAL_UART_STATE_BUSY_TX;/* Init tickstart for timeout managment *///获取当前的时候,用于判断是否超时tickstart = HAL_GetTick();huart->TxXferSize = Size;//表示要发送的个数huart->TxXferCount = Size;//还要发送的个数=总个数-已经发送while (huart->TxXferCount > 0U){huart->TxXferCount--;if (huart->Init.WordLength == UART_WORDLENGTH_9B){//等待标志发生,查看是否超时if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_TXE, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;//超时}tmp = (uint16_t *) pData;huart->Instance->DR = (*tmp & (uint16_t)0x01FF);if (huart->Init.Parity == UART_PARITY_NONE){pData += 2U;}else{pData += 1U;}}else{if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_TXE, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;}//真正执行操作的代码huart->Instance->DR = (*pData++ & (uint8_t)0xFF);}}//查看发送是否已经完成【阻塞等待串口发完】if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_TC, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;}/* At end of Tx process, restore huart->gState to Ready */huart->gState = HAL_UART_STATE_READY;/* Process Unlocked *///解锁__HAL_UNLOCK(huart);return HAL_OK;}else{return HAL_BUSY;}
}

1.2 阻塞式接收:HAL_UART_Receive(不常用)
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
{uint16_t *tmp;uint32_t tickstart = 0U;/* Check that a Rx process is not already ongoing */if (huart->RxState == HAL_UART_STATE_READY){if ((pData == NULL) || (Size == 0U)){return HAL_ERROR;}/* Process Locked */__HAL_LOCK(huart);huart->ErrorCode = HAL_UART_ERROR_NONE;huart->RxState = HAL_UART_STATE_BUSY_RX;/* Init tickstart for timeout managment */tickstart = HAL_GetTick();huart->RxXferSize = Size;huart->RxXferCount = Size;/* Check the remain data to be received */while (huart->RxXferCount > 0U){huart->RxXferCount--;if (huart->Init.WordLength == UART_WORDLENGTH_9B){//检查UART_FLAG_RXNE是否为空,如果为非空,表示接收到数据if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_RXNE, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;}tmp = (uint16_t *) pData;if (huart->Init.Parity == UART_PARITY_NONE){*tmp = (uint16_t)(huart->Instance->DR & (uint16_t)0x01FF);pData += 2U;}else{*tmp = (uint16_t)(huart->Instance->DR & (uint16_t)0x00FF);pData += 1U;}}else{if (UART_WaitOnFlagUntilTimeout(huart, UART_FLAG_RXNE, RESET, tickstart, Timeout) != HAL_OK){return HAL_TIMEOUT;}if (huart->Init.Parity == UART_PARITY_NONE){*pData++ = (uint8_t)(huart->Instance->DR & (uint8_t)0x00FF);}else{*pData++ = (uint8_t)(huart->Instance->DR & (uint8_t)0x007F);}}}/* At end of Rx process, restore huart->RxState to Ready */huart->RxState = HAL_UART_STATE_READY;/* Process Unlocked */__HAL_UNLOCK(huart);return HAL_OK;}3.延时时间的设置
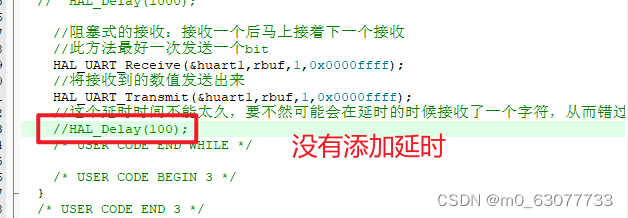
如果我们设置的延时时间太长,则我们可能会在延时的时候错过一些字符的发送和接收。



4.总结
int main(void)
{//定义一个要进行发送的数据uint8_t sbuf[8]="stm32";//定义一个要进行接收的数据uint8_t rbuf[20]="";HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();while (1){//第一个参数要传入的是地址//size:要发送的大小//0x0000ffff:超时时间// HAL_UART_Transmit(&huart1,sbuf,5,0x0000ffff);// HAL_Delay(1000);//阻塞式的接收:接收一个后马上接着下一个接收//此方法最好一次发送一个bitHAL_UART_Receive(&huart1,rbuf,1,0x0000ffff);//将接收到的数值发送出来HAL_UART_Transmit(&huart1,rbuf,1,0x0000ffff);//这个延时时间不能太久,要不然可能会在延时的时候接收了一个字符,从而错过这个//HAL_Delay(100);}
}阻塞式的发送实际用的很多,因为编程简单。缺陷是浪费高速CPU的部分性能,没有追求到串口发送和整个系统性能的最高。
2、非阻塞式(中断)串口发送
1.HAL_UART_Transmit_IT
这个函数没有超时时间,因为我们不用等。
注意点::要打开中断
HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
{/* Check that a Tx process is not already ongoing */if (huart->gState == HAL_UART_STATE_READY){if ((pData == NULL) || (Size == 0U)){return HAL_ERROR;}/* Process Locked */__HAL_LOCK(huart);//因为我们使用中断方式,则需要在串口内部定义一个buf,使得buf指向data的地址huart->pTxBuffPtr = pData;huart->TxXferSize = Size;huart->TxXferCount = Size;huart->ErrorCode = HAL_UART_ERROR_NONE;huart->gState = HAL_UART_STATE_BUSY_TX;/* Process Unlocked */__HAL_UNLOCK(huart);/* Enable the UART Transmit data register empty Interrupt *///使能UART发送数据寄存器空中断__HAL_UART_ENABLE_IT(huart, UART_IT_TXE);return HAL_OK;}else{return HAL_BUSY;}
}
2.注意点
我们使用这个中断式的应该打开Usart的中断


int main(void)
{//定义一个要进行发送的数据uint8_t sbuf[8]="stm32";//定义一个要进行接收的数据uint8_t rbuf[20]="";HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();while (1){/**中断式发送和接收*/HAL_UART_Transmit_IT(&huart1,sbuf,5);HAL_Delay(100);}
}3.printf的实现
printf的实现其实就是重载fputc函数
1.原始代码
#ifdef __GNUC__#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
/*** @brief Retargets the C library printf function to the USART.* @param None* @retval None*/
PUTCHAR_PROTOTYPE
{/* Place your implementation of fputc here *//* e.g. write a character to the EVAL_COM1 and Loop until the end of transmission */HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);return ch;
}2.注意点1:
一定一定要勾选User MicroLIB

3.注意点2:
我们使用到了fputc,其中FILE中是定义在<stdio.h>中的宏定义
定义在usart.h中



int main(void)
{/* USER CODE BEGIN 1 *///定义一个要进行发送的数据uint8_t sbuf[8]="stm32";//定义一个要进行接收的数据uint8_t rbuf[20]="";HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();while (1){float a=4.532;printf("a=%f\n",a);printf("test\r");}
}4.串口接收编程实战
1、阻塞式串口接收
CPU等着过来。所以当CPU临时去处理其他事情时,可能会错过一些串口的输出。所以我们基本上不用。如果真的要使用,则要协调好延时和串口的接收和发送。
2、中断式串口接收
使用中断的方式向串口发送数据并且输出
1.先开启uart中断

2.写中断处理函数:HAL_UART_RxCpltCallback
在main函数中
//rc用来暂存和处理串口接收到的字节内容的
uint8_t receive_char;//这个就是HAL库对接的中断处理程序
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{//判断是否为usart1if(huart->Instance == USART1){//这里就是真正的中断处理代码//我们这里的处理就是接收到一个字节后原封不动的发回去HAL_UART_Transmit(&huart1, &receive_char, 1,0xFF);//发送字符//等待本次接收完毕,同时开启下一次接收【更新receive_char】//HAL_UART_Receive_IT:开启中断处理流程while(HAL_UART_Receive_IT(&huart1, &receive_char, 1) != HAL_OK);}}

3.注册中断
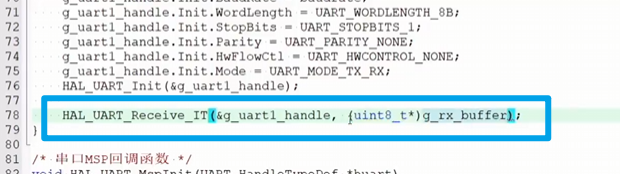
由上面分析可以知道,我们在进入中断处理函数中,是将接收到的字符发送出去,所以我们需要在外部先接收到字符【触发中断】,才可以发送。所以我们需要在其他模块初始化的位置先进入一次中断,接收串口发送的数据。

3.测试代码
此代码:在我们不向串口发送字符时,每3s发送一次a,当我们向串口发送数据时,会马上在串口输出。
int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();//从此处进入中断处理程序HAL_UART_Receive_IT(&huart1, &receive_char, 1);while (1){float a=4.532;printf("a=%f\n",a);HAL_Delay(3000);}
}//这个就是HAL库对接的中断处理程序
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{//判断是否为usart1if(huart->Instance == USART1){//这里就是真正的中断处理代码//我们这里的处理就是接收到一个字节后原封不动的发回去HAL_UART_Transmit(&huart1, &receive_char, 1,0xFF);//发送字符//等待本次接收完毕,同时开启下一次接收【更新receive_char】//HAL_UART_Receive_IT:开启中断处理流程while(HAL_UART_Receive_IT(&huart1, &receive_char, 1) != HAL_OK);}}
3.处理串口中断的流程


在初始化部分已经将中断连接起来,到时候产生中断则直接进入【HAL_UART_RxCpltCallback】这个函数
5.案例1:基于串口的命令shell实现
命令shell:发送一个命令返回一个回应
1.协议自定义
(1)指令集:指令1:add 指令2:sub
(2)指令结束符:';'【定义普通指令中不可能出现的】
(3)指令中遇到回车和空格、Tab等特殊字符怎么办
2.实现思路分析
1.定义一个缓冲区,存储接到的数据

2.定义一个索引值
值存储再buf中的第几个字节

3.代码编写


/* USER CODE BEGIN 4 */
//这个就是HAL库对接的中断处理程序
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{//判断是否为usart1if(huart->Instance == USART1){//将receive_char的数值存放再buf中rev_buf[tindex]=receive_char;//暂存tindex++;//指向下一个while(HAL_UART_Receive_IT(&huart1, &receive_char, 1) != HAL_OK);}}4.main函数编写
1)判断指令
2)buf和index要记得清空
6.串口实验
1.串口接收数据过程

2.串口发送数据过程