目录
1. 源码下载
2. DSP库源码简介
3.基于库的移植(DSP库的使用)
3.1 实验1
3.2 实验2
4. 使用V6版本的编译器进行编译
上一篇:STM32F407-Discovery的硬件FPU-CSDN博客
1. 源码下载
Github地址:GitHub - ARM-software/CMSIS_5: CMSIS Version 5 Development Repository
最新版本是5.9.0,也可以使用HAL库里自带的,本文基于STM32Cube_FW_F4_V1.27.0里自带的DSP版本
2. DSP库源码简介
目录结构如下:\Drivers\CMSIS\DSP
 Example:官方自带的一些示例
Example:官方自带的一些示例
Include:公共头文件夹目录,其中比较重要的是arm_math.h
Projects:官方自带的工程示例
Source:DSP的源码实现,是重点目录
Source目录下各个文件夹实现功能简介如下表:
| 文件夹 | 实现的功能(API) |
| BasicMathFunctions | 实现基本数学函数,有浮点/定点/向量等基本运算 |
| CommonTables | 一些公用的参数表 |
| ComplexMathFunctions | 复数的计算:加减乘除、取模等 |
| ControllerFunctions | 一些控制功能函数:比如PID控制算法 |
| FastMathFunctions | 纯数学理论实现的一些快速计算算法:求正余弦/快速开方 |
| FilteringFunctions | 滤波功能的实现:IIR/FIR/LMS/求卷积等 |
| MatrixFunctions | 矩阵运算相关API:加减法、转置、求逆等 |
| StatisticsFunctions | 常用的统计学方法:求均值/方差/标准差/均方根等 |
| SupportFunctions | 功能性函数:数据拷贝(连续的一大块)/定点浮点之间的转换 |
| TransformFunctions | 变换函数实现:复数/实数的FFT/IFFT以及离散余弦变换DCT |
对应的DSP LIB库:\Drivers\CMSIS\Lib\ARM:

STM32F4是M4内核,FPU支持单精度浮点数据运算,小端模式,所以:arm_cortexM4lf_math.lib是重点文件。
3.基于库的移植(DSP库的使用)
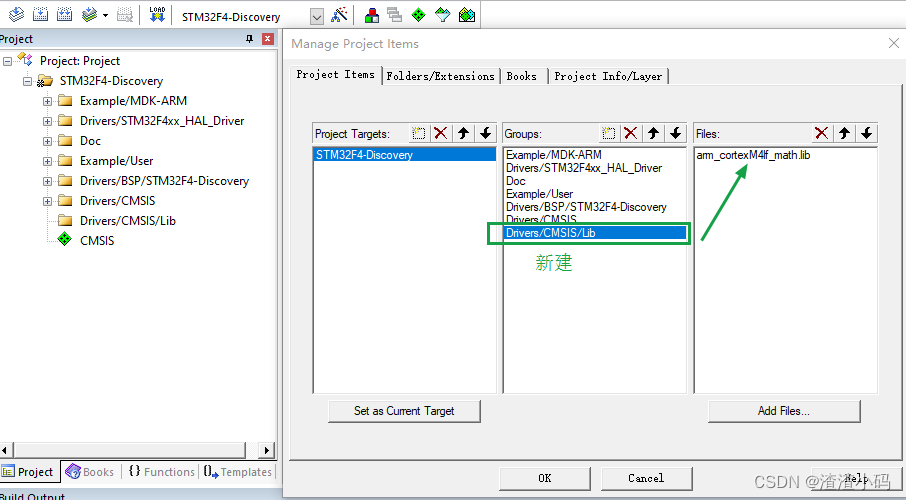
仿照源代码库文件所在的目录结构,新建文件夹:Drivers\CMSIS\Lib\ARM
然后直接拷贝arm_cortexM4lf_math.lib到ARM目录下。

仿照源代码库的目录结构,新建文件夹:Drivers\CMSIS\DSP\Include
同样将源码目录中的三个头文件拷贝过来:

将库文件添加到Keil工程,并且添加头文件路径:

到此,库的移植已经完毕,接下来是预处理定义一些宏。
(1) 首先是硬件FPU要开启:取决于__FPU_PRESENT和__FPU_USED
详见上一篇:STM32F407-Discovery的硬件FPU-CSDN博客
(2) 使用DSP库中的基本数学运算实现,比如sin()/cos():ARM_MATH_DSP
(3) 如果使用矩阵运算,则矩阵大小是个很值得注意的问题,运算前要对输入矩阵的大小进行检查:ARM_MATH_MATRIX_CHECK
(4) 浮点数转 Q32/Q15/Q7 时,处理四舍五入,最大限度确保数据精度不丢失: ARM_MATH_ROUNDING
(5) 批量处理数据时,加快执行速度,比如批量求绝对值: ARM_MATH_LOOPUNROLL
(6) 最后是CM4内核的一个宏:ARM_MATH_CM4
把这些添加到全局的宏定义中:

| USE_HAL_DRIVER,STM32F407xx,USE_STM32F4_DISCO,ARM_MATH_MATRIX_CHECK,ARM_MATH_ROUNDING,ARM_MATH_LOOPUNROLL,ARM_MATH_CM4 |
3.1 实验1
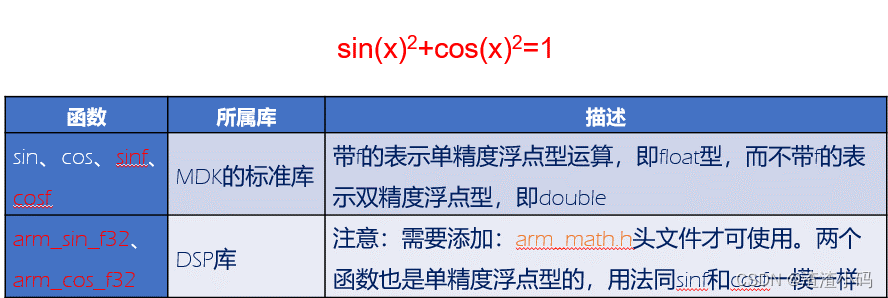
对比MDK标准库函数和DSP库函数的计算速度。
Main.c
/* Includes ------------------------------------------------------------------*/
#include "main.h"#define DELTA 0.0001f /* 误差值 */
extern TIM_HandleTypeDef g_timx_handle;
uint8_t g_timeout;/*** @brief sin cos 测试* @param angle : 起始角度* @param times : 运算次数* @param mode : 是否使用DSP库* @arg 0 , 不使用DSP库;* @arg 1 , 使用DSP库;** @retval 无*/
uint8_t sin_cos_test(float angle, uint32_t times, uint8_t mode)
{float sinx, cosx;float result;uint32_t i = 0;if (mode == 0){for (i = 0; i < times; i++){cosx = cosf(angle); /* 不使用DSP优化的sin,cos函数 */sinx = sinf(angle);result = sinx * sinx + cosx * cosx; /* 计算结果应该等于1 */result = fabsf(result - 1.0f); /* 对比与1的差值 */if (result > DELTA)return 0XFF; /* 判断失败 */angle += 0.001f; /* 角度自增 */}}else{for (i = 0; i < times; i++){cosx = arm_cos_f32(angle); /* 使用DSP优化的sin,cos函数 */sinx = arm_sin_f32(angle);result = sinx * sinx + cosx * cosx; /* 计算结果应该等于1 */result = fabsf(result - 1.0f); /* 对比与1的差值 */if (result > DELTA)return 0XFF; /* 判断失败 */angle += 0.001f; /* 角度自增 */}}return 0; /* 任务完成 */
}int main(void)
{float time;uint8_t res;/* STM32F4xx HAL library initialization:- Configure the Flash prefetch, instruction and Data caches- Configure the Systick to generate an interrupt each 1 msec- Set NVIC Group Priority to 4- Global MSP (MCU Support Package) initialization*/HAL_Init();
/* Configure the system clock to 168 MHz */SystemClock_Config();/* 串口2初始化: 只用tx功能 */if(uart2_init(9600)){Error_Handler();}#if 1
// BSP_LED_Off(LED6);
// HAL_Delay(200);
//
// BSP_LED_On(LED6);
// //HAL_Delay(1000);
// //test_fpu_tmp1();
// fft_test();
// BSP_LED_Off(LED6);
// for (int i=0; i <N; i++) { //打印很耗时
// printf("ifft: OUTPUT_SEQ[%d].real=%f, OUTPUT_SEQ[%d].img=%f\n", i, OUTPUT_SEQ[i].real, i, OUTPUT_SEQ[i].img);
// }
// printf("\n\n");//不用GPIO来测量时长了,改用定时器btim_timx_int_init(65535, 8400 - 1);__HAL_TIM_SET_COUNTER(&g_timx_handle, 0); /* 重设TIM6定时器的计数器值 */g_timeout = 0;res = sin_cos_test(PI / 6, 200000, 0);//HAL_Delay(1000);time = __HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%0.1fms\r\n", time / 10);/* 使用DSP优化 */__HAL_TIM_SET_COUNTER(&g_timx_handle, 0); /* 重设TIM6定时器的计数器值 */g_timeout = 0;res = sin_cos_test(PI / 6, 200000, 1);time = __HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%0.1fms\r\n", time / 10);
#endifprintf("__CC_ARM:%d\n", __CC_ARM);printf("__FPU_PRESENT:%d\n", __FPU_PRESENT);printf("__FPU_USED:%d\n", __FPU_USED);printf("SCB->CPACR:0x%x\n", SCB->CPACR);while(1){;}return 0;
}/*** @brief System Clock Configuration* The system Clock is configured as follow :* System Clock source = PLL (HSE)* SYSCLK(Hz) = 168000000* HCLK(Hz) = 168000000* AHB Prescaler = 1* APB1 Prescaler = 4* APB2 Prescaler = 2* HSE Frequency(Hz) = 8000000* PLL_M = 8* PLL_N = 336* PLL_P = 2* PLL_Q = 7* VDD(V) = 3.3* Main regulator output voltage = Scale1 mode* Flash Latency(WS) = 5* @param None* @retval None*/
static void SystemClock_Config(void)
{RCC_ClkInitTypeDef RCC_ClkInitStruct;RCC_OscInitTypeDef RCC_OscInitStruct;/* Enable Power Control clock */__HAL_RCC_PWR_CLK_ENABLE();/* The voltage scaling allows optimizing the power consumption when the device isclocked below the maximum system frequency, to update the voltage scaling valueregarding system frequency refer to product datasheet. */__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);/* Enable HSE Oscillator and activate PLL with HSE as source */RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 8;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 7;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/* Select PLL as system clock source and configure the HCLK, PCLK1 and PCLK2clocks dividers */RCC_ClkInitStruct.ClockType = (RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2);RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK){Error_Handler();}/* STM32F405x/407x/415x/417x Revision Z devices: prefetch is supported */if (HAL_GetREVID() == 0x1001){/* Enable the Flash prefetch */__HAL_FLASH_PREFETCH_BUFFER_ENABLE();}
}运行结果如下:
| [22:54:44.691] 315.0ms //使用库函数 [22:54:44.851] 153.9ms //使用DSP [22:54:44.851] __CC_ARM:1 [22:54:44.867] __FPU_PRESENT:1 [22:54:44.883] __FPU_USED:1 [22:54:44.898] SCB->CPACR:0xf00000 |
3.2 实验2
测量计算1024个点的复数FFT运行时长
main.c
/* FFT长度,如果不指定,则默认是1024个点* 长度可选范围: 16, 64, 256, 1024.*/
#define FFT_LENGTH 1024float fft_inputbuf[FFT_LENGTH * 2]; /* FFT输入数组 */
float fft_outputbuf[FFT_LENGTH]; /* FFT输出数组 */
uint8_t g_timeout;
extern TIM_HandleTypeDef g_timx_handle;int main(void)
{float time;uint8_t res;int i;arm_cfft_radix4_instance_f32 scfft;/* STM32F4xx HAL library initialization:- Configure the Flash prefetch, instruction and Data caches- Configure the Systick to generate an interrupt each 1 msec- Set NVIC Group Priority to 4- Global MSP (MCU Support Package) initialization*/HAL_Init();/* Configure the system clock to 168 MHz */SystemClock_Config();/* 串口2初始化: 只用tx功能 */if(uart2_init(9600)){Error_Handler();}/* 初始化scfft结构体,设置相关参数 */arm_cfft_radix4_init_f32(&scfft, FFT_LENGTH, 0, 1);#if 1/* 初始化输入序列 */for (i = 0; i < FFT_LENGTH; i++){fft_inputbuf[2 * i] = 100 +10 * arm_sin_f32(2 * PI * i / FFT_LENGTH) +30 * arm_sin_f32(2 * PI * i * 4 / FFT_LENGTH) +50 * arm_cos_f32(2 * PI * i * 8 / FFT_LENGTH); /* 实部 */fft_inputbuf[2 * i + 1] = 0; /* 虚部: 都是0 */}btim_timx_int_init(65535, 8400 - 1);__HAL_TIM_SET_COUNTER(&g_timx_handle, 0); /* 重设TIM6定时器的计数器值 */g_timeout = 0;arm_cfft_radix4_f32(&scfft, fft_inputbuf); /* FFT(基4) *//* 计算运行时间 */time =__HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%0.1fms\r\n", time / 10);arm_cmplx_mag_f32(fft_inputbuf, fft_outputbuf, FFT_LENGTH); /* 求模 */printf("\r\n%d point FFT runtime:%0.1fms\r\n", FFT_LENGTH, time / 10);
// printf("FFT Result:\r\n");// for (i = 0; i < FFT_LENGTH; i++)
// {
// printf("fft_outputbuf[%d]:%f\r\n", i, fft_outputbuf[i]);
// }
#endifprintf("__CC_ARM:%d\n", __CC_ARM);printf("__FPU_PRESENT:%d\n", __FPU_PRESENT);printf("__FPU_USED:%d\n", __FPU_USED);printf("SCB->CPACR:0x%x\n", SCB->CPACR);while(1){;}return 0;
}打印:大概是0.6ms完成一个1024点的复数运算
| [23:39:30.141] 0.6ms [23:39:30.141] [23:39:30.141] 1024 point FFT runtime:0.0ms [23:39:30.172] __CC_ARM:1 [23:39:30.188] __FPU_PRESENT:1 [23:39:30.204] __FPU_USED:1 [23:39:30.220] SCB->CPACR:0xf00000 |
4. 使用V6版本的编译器进行编译

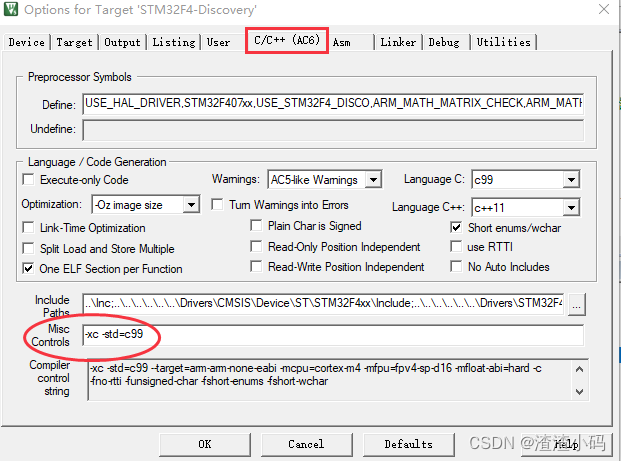
编译出现一堆错:ArmClang: error: unsupported option '--C99'

将--C99改为-xc -std=c99即可:

更改如下:
注:
(1)如果要用V5编译器,则该选项要改回--C99
(2)V6版本的编译器对浮点数运算有做优化,将优化等级配置为fast mode后,相对V5版本有明显速度的提升,如下:
AC6版本编译器配置

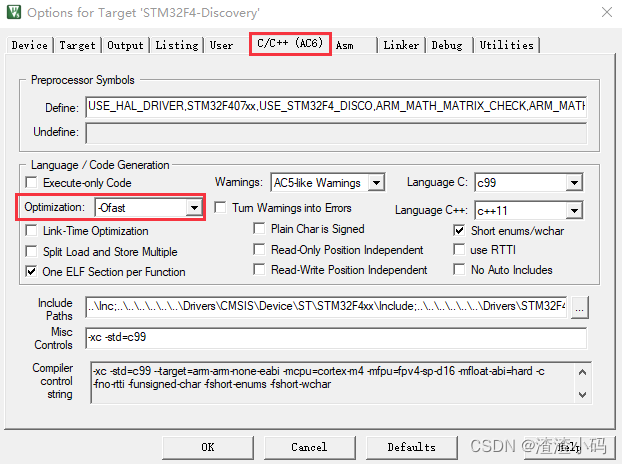
基于上面的实验2:运行结果用了0.5ms
[10:47:32.200] test_fft()->times: 0.500000ms
[10:47:32.232] __FPU_PRESENT:1
[10:47:32.248] __FPU_USED:1
[10:47:32.264] SCB->CPACR:0xf00000
关于MDK5的AC5,AC6编译器对比,可以参考这个论坛:
https://www.armbbs.cn/forum.php?mod=viewthread&tid=95455
测试代码:main.c
/********************************************************************************* @file UART/UART_TwoBoards_ComPolling/Src/main.c* @author MCD Application Team* @brief This sample code shows how to use STM32F4xx UART HAL API to transmit* and receive a data buffer with a communication process based on* polling transfer.* The communication is done using 2 Boards.******************************************************************************* @attention** Copyright (c) 2017 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************//* Includes ------------------------------------------------------------------*/
#include "main.h"/** @addtogroup STM32F4xx_HAL_Examples* @{*//** @addtogroup UART_TwoBoards_ComPolling* @{*//* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define TRANSMITTER_BOARD/* Private function prototypes -----------------------------------------------*/
static void SystemClock_Config(void);
static void Error_Handler(void);/* Private functions ---------------------------------------------------------*/extern TIM_HandleTypeDef g_timx_handle;
uint8_t g_timeout;float re_dat;
float a=0.14f;
float b=0.26f;void test_fpu_tmp1(void)
{long i, j;float re_nul;float time;/* 初始化定时器6 */btim_timx_int_init(65535, 8400 - 1);/* 重设TIM6定时器的计数器值 */__HAL_TIM_SET_COUNTER(&g_timx_handle, 0);g_timeout = 0;for(i=0; i<10000; i++) {for(j=0; j<2; j++) {re_nul=a*b;re_dat=re_dat+re_nul;a=a+0.1f;b=b+0.1f;}}/* 计算运行时间 */time =__HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%s()->times: %fms\r\n", __func__, time / 10);btim_timx_int_deinit(65535, 8400 - 1);printf("re_dat:%f\n", re_dat);}complex INPUT_SEQ[FFT_LEN], RES_SEQ[FFT_LEN], OUTPUT_SEQ[FFT_LEN];
float SEQ_DAT[FFT_LEN], dataR[FFT_LEN], dataI[FFT_LEN];
int fft_priv_test(void)
{int i, j;float time;//构造实数序列for (i=0; i < FFT_LEN; i++) {SEQ_DAT[i]=i+0.0f;}//构造虚数序列for (j=0; j<FFT_LEN; j++) {INPUT_SEQ[j].real= SEQ_DAT[j];INPUT_SEQ[j].img=0.0f;}// for (i=0; i <FFT_LEN; i++) {
// printf("before fft: INPUT_SEQ[%d].real=%f, INPUT_SEQ[%d].img=%f\n", i, INPUT_SEQ[i].real, i, INPUT_SEQ[i].img);
// }
// printf("\n\n");/* 初始化定时器6 */btim_timx_int_init(65535, 8400 - 1);/* 重设TIM6定时器的计数器值 */__HAL_TIM_SET_COUNTER(&g_timx_handle, 0);g_timeout = 0;#if 1FFT(INPUT_SEQ, FFT_LEN, FFT_ORDER, RES_SEQ);
// for (i=0; i <FFT_LEN; i++) {
// printf("fft: RES_SEQ[%d].real=%f, RES_SEQ[%d].img=%f\n", i, RES_SEQ[i].real, i, RES_SEQ[i].img);
// }
// printf("\n\n");iFFT(RES_SEQ, FFT_LEN, FFT_ORDER, OUTPUT_SEQ);/* 计算运行时间 */time =__HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%s()->times: %fms\r\n", __func__, time / 10);btim_timx_int_deinit(65535, 8400 - 1);#elseHAL_Delay(1000);
#endif// for (i=0; i <FFT_LEN; i++) { //打印很耗时
// printf("ifft: OUTPUT_SEQ[%d].real=%f, OUTPUT_SEQ[%d].img=%f\n", i, OUTPUT_SEQ[i].real, i, OUTPUT_SEQ[i].img);
// }
// printf("\n\n");return 0;
}#define DELTA 0.0001f /* 误差值 *//*** @brief sin cos 测试* @param angle : 起始角度* @param times : 运算次数* @param mode : 是否使用DSP库* @arg 0 , 不使用DSP库;* @arg 1 , 使用DSP库;** @retval 无*/
uint8_t sin_cos_test(float angle, uint32_t times, uint8_t mode)
{float sinx, cosx;float result;float time;uint32_t i = 0;/* 初始化定时器6 */btim_timx_int_init(65535, 8400 - 1);/* 重设TIM6定时器的计数器值 */__HAL_TIM_SET_COUNTER(&g_timx_handle, 0);g_timeout = 0;if (mode == 0){printf("not use DSP\n");for (i = 0; i < times; i++){cosx = cosf(angle); /* 不使用DSP优化的sin,cos函数 */sinx = sinf(angle);result = sinx * sinx + cosx * cosx; /* 计算结果应该等于1 */result = fabsf(result - 1.0f); /* 对比与1的差值 */if (result > DELTA)return 0XFF; /* 判断失败 */angle += 0.001f; /* 角度自增 */}}else{printf("use DSP\n");for (i = 0; i < times; i++){cosx = arm_cos_f32(angle); /* 使用DSP优化的sin,cos函数 */sinx = arm_sin_f32(angle);result = sinx * sinx + cosx * cosx; /* 计算结果应该等于1 */result = fabsf(result - 1.0f); /* 对比与1的差值 */if (result > DELTA)return 0XFF; /* 判断失败 */angle += 0.001f; /* 角度自增 */}}/* 计算运行时间 */time =__HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%s()->times: %fms\r\n", __func__, time / 10);btim_timx_int_deinit(65535, 8400 - 1);return 0; /* 任务完成 */
}/******************************************************************/
/* FFT长度,如果不指定,则默认是1024个点* 长度可选范围: 16, 64, 256, 1024.*/
#define FFT_LENGTH 1024
float fft_inputbuf[FFT_LENGTH * 2]; /* FFT输入数组 */
float fft_outputbuf[FFT_LENGTH]; /* FFT输出数组 */void test_fft(void)
{int i;float time;arm_cfft_radix4_instance_f32 scfft;/* 初始化scfft结构体,设置相关参数 */arm_cfft_radix4_init_f32(&scfft, FFT_LENGTH, 0, 1);/* 初始化输入序列 */for (i = 0; i < FFT_LENGTH; i++){/* 实部 */fft_inputbuf[2 * i] = 100 +10 * arm_sin_f32(2 * PI * i / FFT_LENGTH) +30 * arm_sin_f32(2 * PI * i * 4 / FFT_LENGTH) +50 * arm_cos_f32(2 * PI * i * 8 / FFT_LENGTH);/* 虚部: 都是0 */fft_inputbuf[2 * i + 1] = 0;}/* 初始化定时器6 */btim_timx_int_init(65535, 8400 - 1);/* 重设TIM6定时器的计数器值 */__HAL_TIM_SET_COUNTER(&g_timx_handle, 0);g_timeout = 0;/* FFT(基4) */arm_cfft_radix4_f32(&scfft, fft_inputbuf);/* 计算运行时间 */time =__HAL_TIM_GET_COUNTER(&g_timx_handle) + (uint32_t)g_timeout * 65536;printf("%s()->times: %fms\r\n", __func__, time / 10);/* 求模 */
// arm_cmplx_mag_f32(fft_inputbuf, fft_outputbuf, FFT_LENGTH);
//
// printf("\r\n%d point FFT runtime:%0.1fms\r\n", FFT_LENGTH, time / 10);
// printf("FFT Result:\r\n");
//
// for (i = 0; i < FFT_LENGTH; i++)
// {
// printf("fft_outputbuf[%d]:%f\r\n", i, fft_outputbuf[i]);
// }btim_timx_int_deinit(65535, 8400 - 1);
}
/******************************************************************/int main(void)
{uint8_t res;/* STM32F4xx HAL library initialization:- Configure the Flash prefetch, instruction and Data caches- Configure the Systick to generate an interrupt each 1 msec- Set NVIC Group Priority to 4- Global MSP (MCU Support Package) initialization*/HAL_Init();/* Configure the system clock to 168 MHz */SystemClock_Config();/* 串口2初始化: 只用tx功能 */if(uart2_init(9600)){Error_Handler();}#if 1test_fft();
// res=sin_cos_test(PI / 6, 200000, 0);
// res=sin_cos_test(PI / 6, 200000, 1);
// res=fft_priv_test();
// test_fpu_tmp1();
#endif//printf("__CC_ARM:%d\n", __CC_ARM);printf("__FPU_PRESENT:%d\n", __FPU_PRESENT);printf("__FPU_USED:%d\n", __FPU_USED);printf("SCB->CPACR:0x%x\n", SCB->CPACR);while(1){;}return 0;
}/*** @brief System Clock Configuration* The system Clock is configured as follow :* System Clock source = PLL (HSE)* SYSCLK(Hz) = 168000000* HCLK(Hz) = 168000000* AHB Prescaler = 1* APB1 Prescaler = 4* APB2 Prescaler = 2* HSE Frequency(Hz) = 8000000* PLL_M = 8* PLL_N = 336* PLL_P = 2* PLL_Q = 7* VDD(V) = 3.3* Main regulator output voltage = Scale1 mode* Flash Latency(WS) = 5* @param None* @retval None*/
static void SystemClock_Config(void)
{RCC_ClkInitTypeDef RCC_ClkInitStruct;RCC_OscInitTypeDef RCC_OscInitStruct;/* Enable Power Control clock */__HAL_RCC_PWR_CLK_ENABLE();/* The voltage scaling allows optimizing the power consumption when the device isclocked below the maximum system frequency, to update the voltage scaling valueregarding system frequency refer to product datasheet. */__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);/* Enable HSE Oscillator and activate PLL with HSE as source */RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 8;RCC_OscInitStruct.PLL.PLLN = 336;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLQ = 7;if(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/* Select PLL as system clock source and configure the HCLK, PCLK1 and PCLK2clocks dividers */RCC_ClkInitStruct.ClockType = (RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2);RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;if(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK){Error_Handler();}/* STM32F405x/407x/415x/417x Revision Z devices: prefetch is supported */if (HAL_GetREVID() == 0x1001){/* Enable the Flash prefetch */__HAL_FLASH_PREFETCH_BUFFER_ENABLE();}
}/*** @brief UART error callbacks* @param UartHandle: UART handle* @note This example shows a simple way to report transfer error, and you can* add your own implementation.* @retval None*/
void HAL_UART_ErrorCallback(UART_HandleTypeDef *UartHandle)
{/* Turn LED3 on: Transfer error in reception/transmission process */BSP_LED_On(LED3);
}/*** @brief This function is executed in case of error occurrence.* @param None* @retval None*/
static void Error_Handler(void)
{/* Turn LED5 on */BSP_LED_On(LED5);while(1){}
}#ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t* file, uint32_t line)
{/* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* Infinite loop */while (1){}
}
#endif/*** @}*//*** @}*/
下一篇: