文章目录
- 📕教程说明
- 📕HandGrabInteractor
- ⭐HandGrabAPI
- ⭐HandWristPoint
- ⭐GripPoint
- ⭐PinchPoint
- ⭐PinchArea
- ⭐HandGrabVisual
- ⭐HandGrabGlow
- 📕HandGrabInteractable
- ⭐Support Grab Type
- ⭐Pinch Grab Rules 和 Palm Grab Rules
- ⭐Unselect Mode
- ⭐Hand Alignment
- ⭐Scaled Hand Grab Poses
- ⭐Movement Provider
- 🔍MoveTowardsTargetProvider
- 🔍MoveFromTargetProvider
- 🔍FollowTargetProvider
此教程相关的详细教案,文档,思维导图和工程文件会放入 Seed XR 社区。这是一个高质量知识星球 XR 社区,博主目前在内担任 XR 开发的讲师。此外,该社区提供教程答疑、及时交流、进阶教程、外包、行业动态等服务。
知识星球链接:Seed XR 高级社区

📕教程说明
这篇教程将会详细介绍 Meta XR SDK 中 HandGrabInteractor 和 HandGrabInteractable 的相关知识点。
系列教程专栏:https://blog.csdn.net/qq_46044366/category_12118293.html
配套的视频链接:
【2023 VR+MR全硬件开发教程】六、HandGrab-HandGrabInteractor知识点(主讲:YY)
【2023 VR+MR全硬件开发教程】六-2、HandGrabInteractable知识点(主讲:YY)
电脑操作系统:Windows 11
使用的 VR 设备:Meta Quest 3(Quest 系列都适用)
使用的 Unity 版本:2021.3.5 LTS (这里推荐使用 2021 及以上的 LTS 版本)
Meta XR SDK 版本:v57
官方文档:https://developer.oculus.com/documentation/unity/unity-gs-overview/
HandGrab:https://developer.oculus.com/documentation/unity/unity-isdk-hand-grab-interaction/
📕HandGrabInteractor
我们可以找到 Oculus Integration 官方提供的 Hand Grab 示例场景,在 Assets/Oculus/Interaction/Samples/Scenes/Examples 文件夹下的 Hand Grab Examples 场景:

找到 OVRCameraRig 玩家物体,左右手的 HandGrabInteractor 物体在如下图所示的位置:
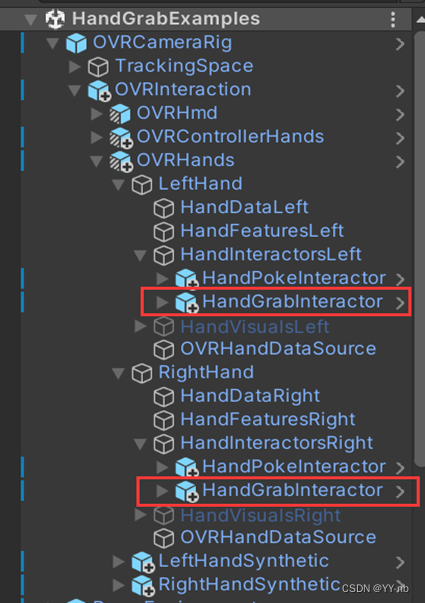
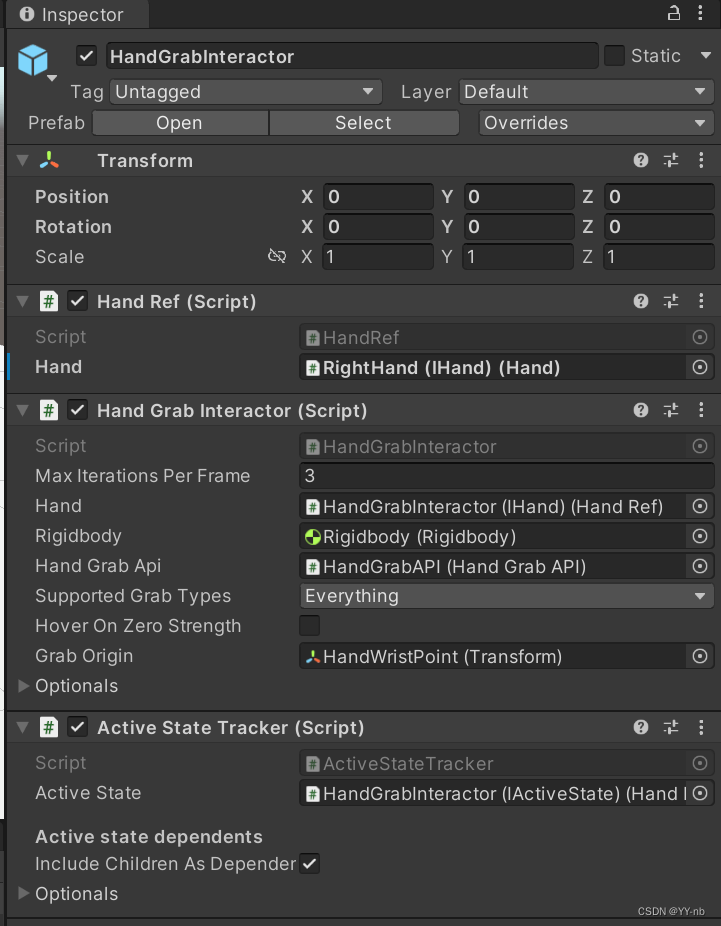
HandGrabInteractor 物体上挂载了 HandGrabInteractor 脚本:
然后我们展开 HandGrabInteractor 物体,接下来我会讲解它身上这些子物体的作用:
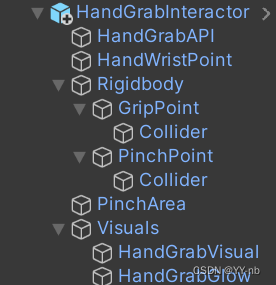
⭐HandGrabAPI
检测 Hand Grab 是否选中或者取消选中可抓取物体,也就是检测抓取动作是否发生。
⭐HandWristPoint
控制在抓取的时候虚拟手部和现实手部在位置和旋转角度上的偏移。
⭐GripPoint
Palm Grab 的探测范围(下图中手掌处的球形范围),调整 GripPoint 上的 HandWristOffset 脚本参数可以修改探测范围的位置和旋转角度。物体进入探测范围后触发抓取,就会被吸到手上。
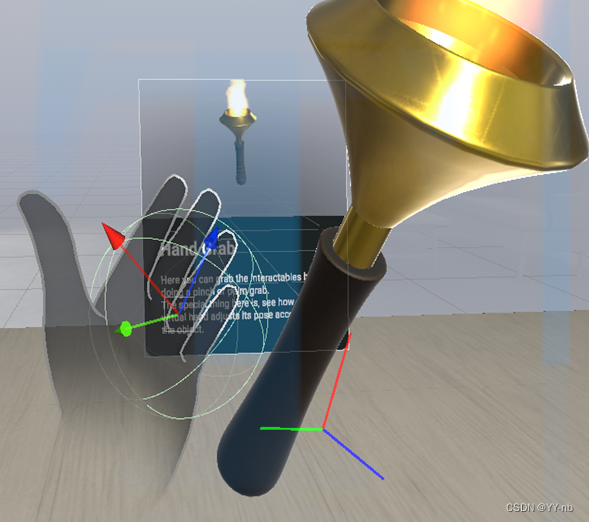
探测范围为 GripPoint 子物体 Collider 的碰撞体范围。
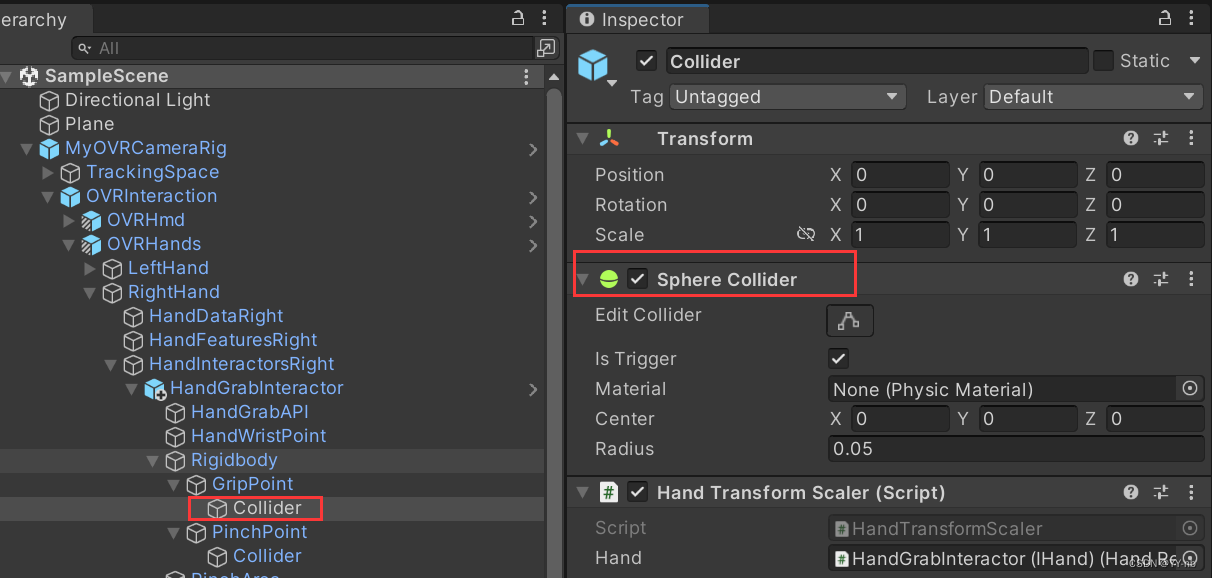
⭐PinchPoint
Pinch Grab 的探测范围,范围大小取决于 PinchPoint 子物体的 Collider 的碰撞体大小。
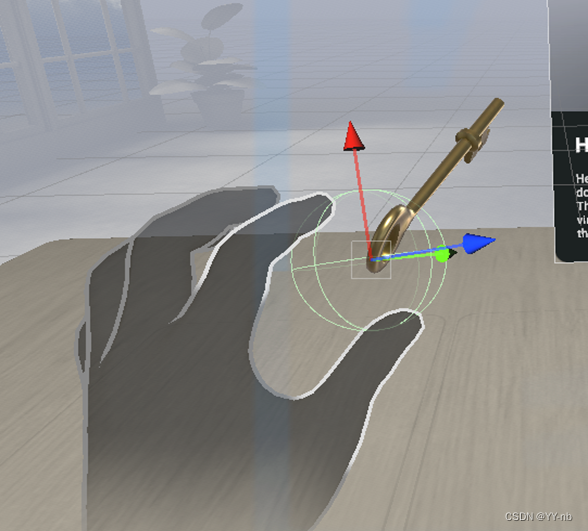
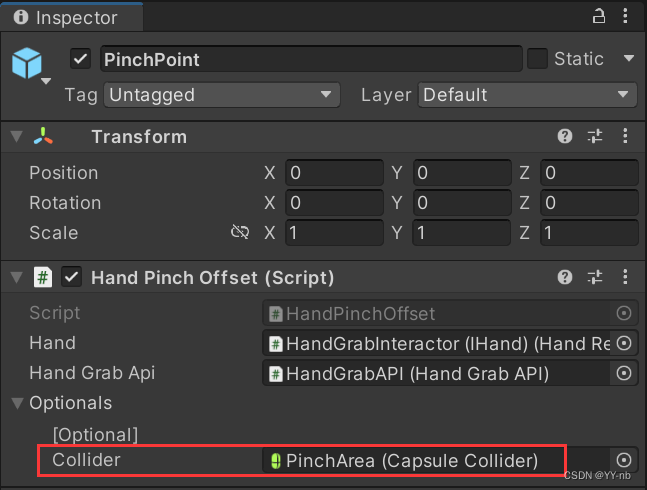
⭐PinchArea
PinchPoint 的 HandPinchOffset 脚本默认引用了 PinchArea 的碰撞体,PinchArea 碰撞体的位置会影响 PinchPoint 探测范围的位置。
PinchArea 碰撞体范围如下图所示。
注:是否能激活 Pinch Grab 实际上看的是物体是否进入到 PinchPoint 的球形检测范围内,而不是看物体是否进入到 PinchArea 范围内。
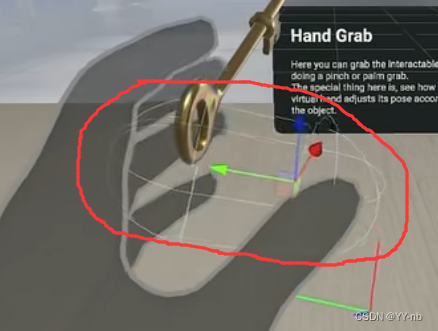
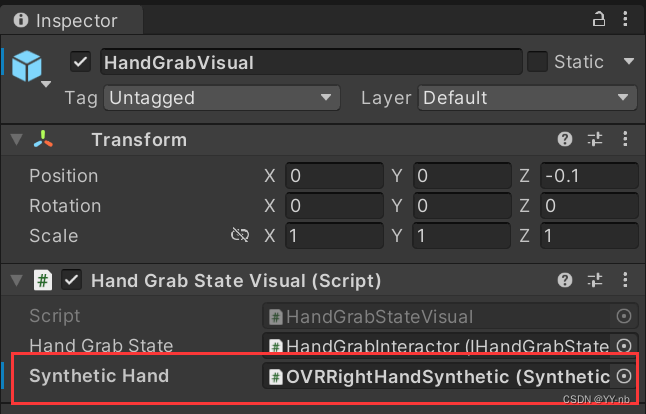
⭐HandGrabVisual
连接 SyntheticHand,在手部呈现出完整的抓取手势后固定手部姿态,让抓取手势不与物体穿模。
⭐HandGrabGlow
控制抓取时手部的特效。

Glow Type
Outline:手指轮廓高亮。

Fill:手指颜色填充。

Both:结合了 Outline 和 Fill
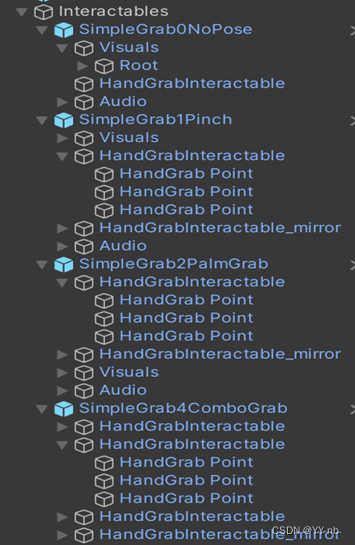
📕HandGrabInteractable
在 Hand Grab Examples 场景中找到可抓取的物体,每一个物体上有一到多个 HandGrabInteractable 子物体。
每一个 HandGrabInteractable 物体上挂载了一个 Hand Grab Interactable 脚本:
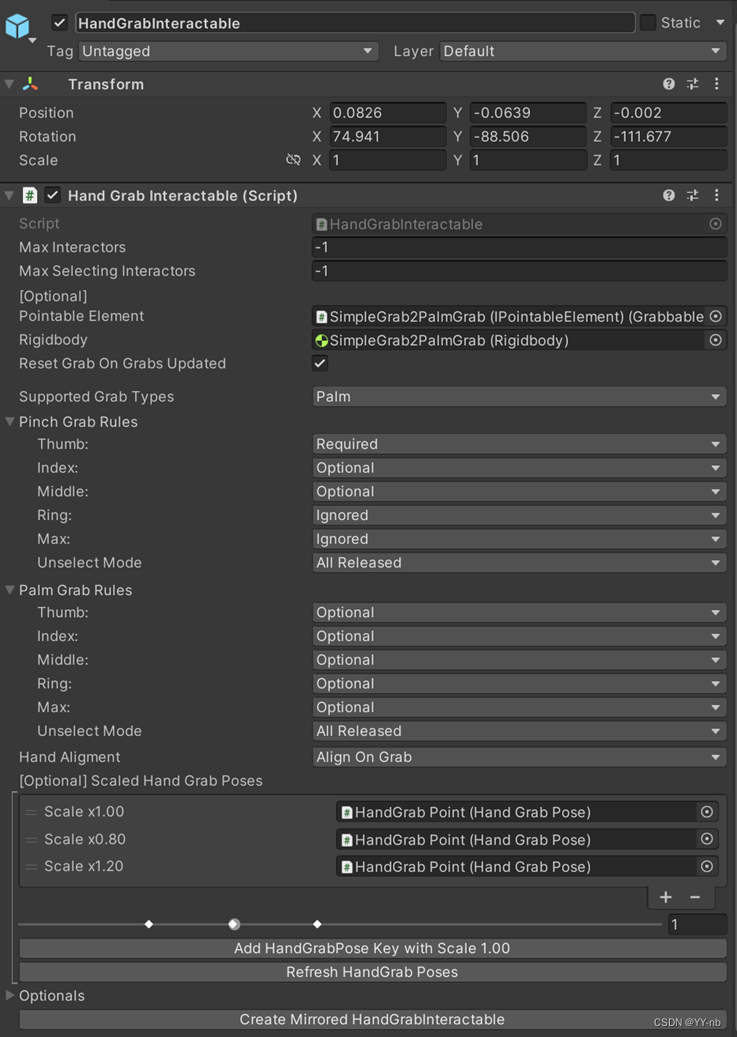
接下来,我来介绍一下脚本上的一些重要参数。
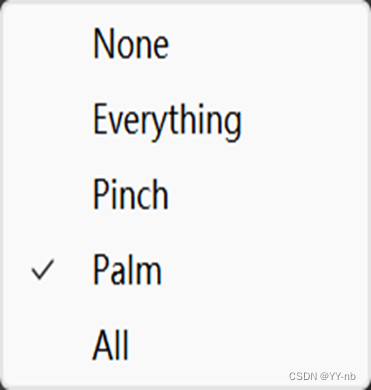
⭐Support Grab Type
用 Hand Grab 当中的哪一种方式去抓取。
⭐Pinch Grab Rules 和 Palm Grab Rules
定义了Pinch Grab 和 Palm Grab 的触发需要用到哪几根手指。每一根手指有三个选项可以选择:Required,Optional,Ignored
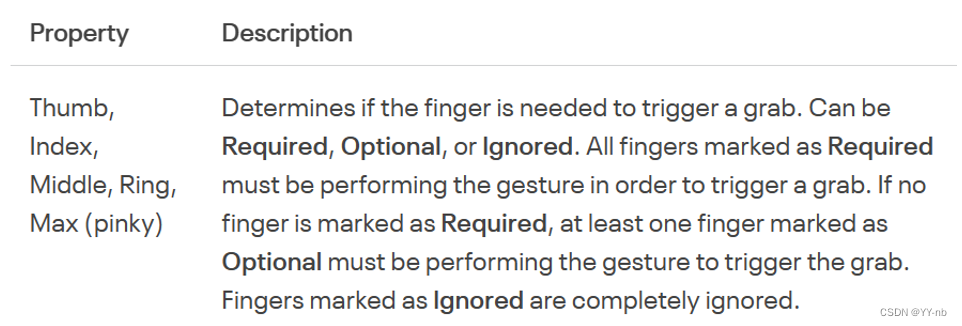
被标记了 Required 的手指必须参与到抓取的触发过程中,也就是说如果我想要抓起一个物体,必须要用到标记了 Required 的手指。比如说五根手指中食指被标记了 Required,那么抓取的时候必须要用到食指,如果只用大拇指和中指是抓不起来的。
如果没有手指被标记了 Required,那么想要抓起一个物体,至少要用到一个标记了 Optional 的手指。
标记了 Ignored 的手指不会被考虑到抓取的触发过程中。
⭐Unselect Mode
决定了抓取了一个物体后什么时候会视为取消抓取。

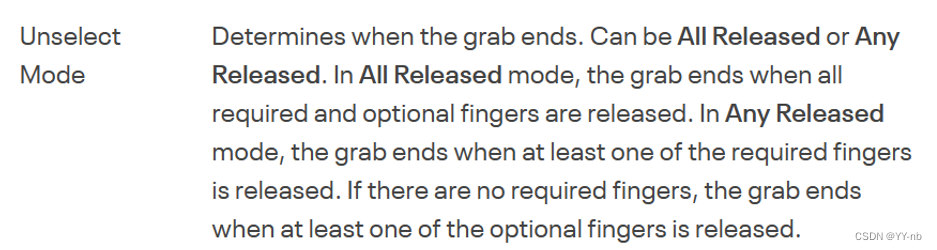
如果选了All Released,当所有标记了 Required 或者 Optional 的手指松开后,视为取消抓取。
如果选了Any Released,只要有一个标记了 Required 的手指松开后,就会视为取消抓取。
⭐Hand Alignment
决定了在抓取的过程中,虚拟的手是如何变化到对应的抓取手势的。
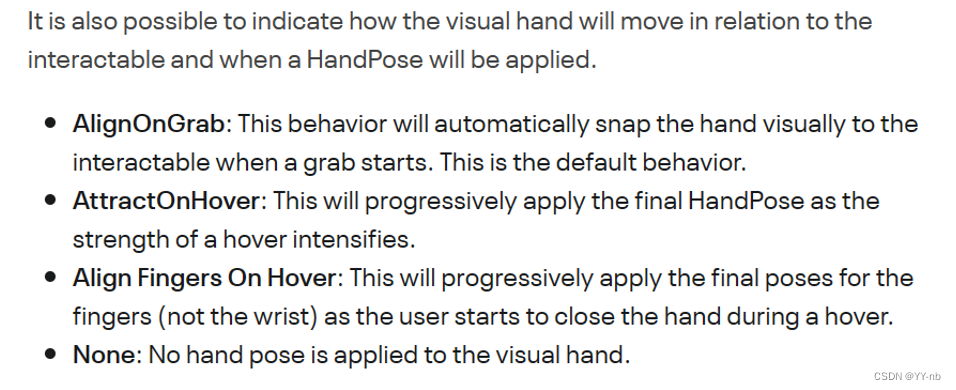
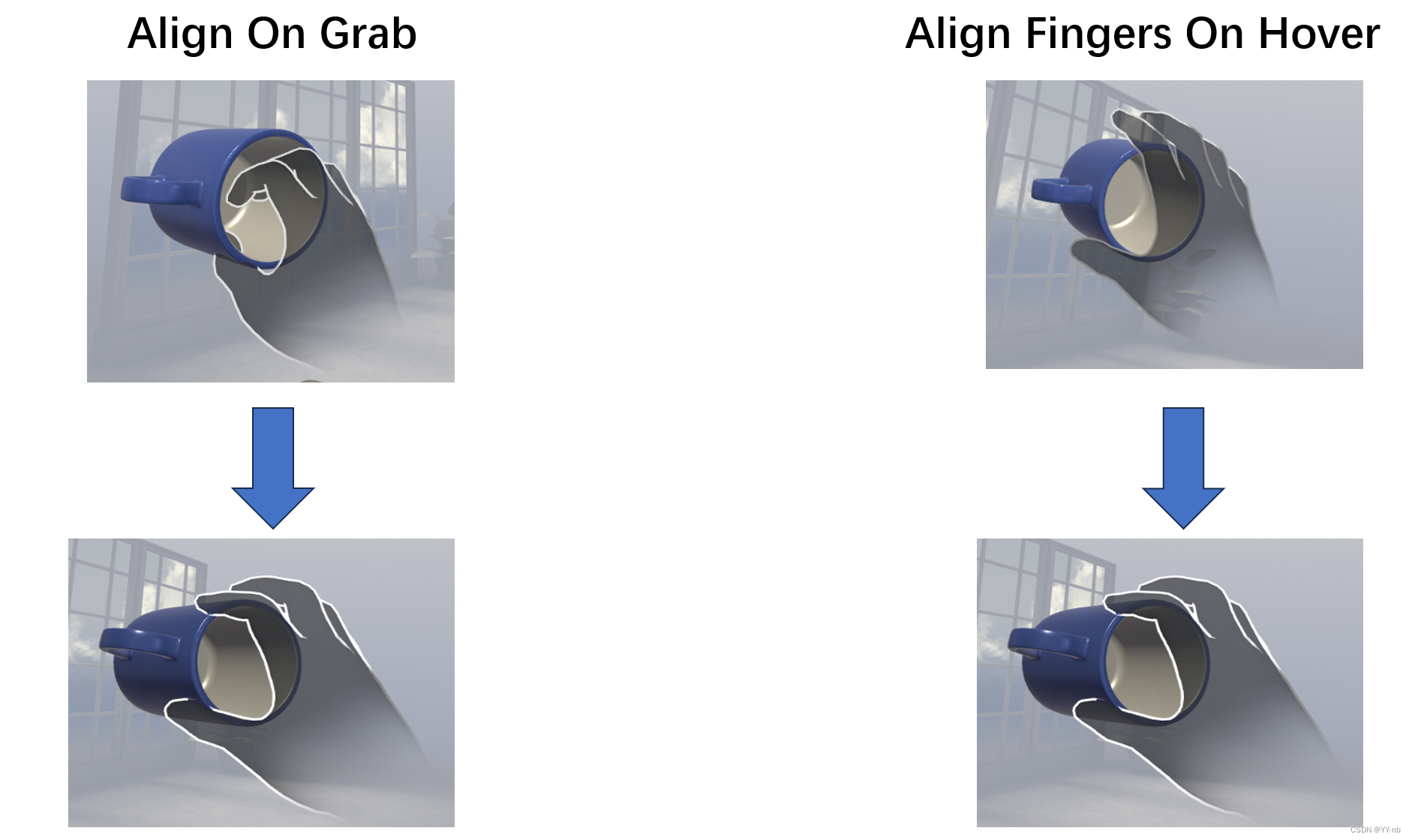
Align On Grab:在抓取的时候会自动调整手部的姿态。
Attract On Hover:手在靠近物体,进入到 Hover 状态后,仿佛会卡住,然后做出抓取的动作,虚拟手就会变化到对应的抓取手势。
Align Fingers On Hover:在进入到 Hover 状态后开始抓取,手指就会逐渐变化到对应的抓取姿态。这个方式需要和 Align On Grab 进行比较会比较直观,如果选了 Align On Grab,虚拟手指在一开始会跟随现实的手进行弯曲,这个时候可能会与物体穿模,然后过一段时间后手指才会变化到抓取手势的姿态。如果选择了 Align Fingers On Hover,在手指弯曲的过程中如果接近了抓取姿态,手指就会直接被卡住,变化到对应的抓取手势,一般情况下手指是不会与物体穿模。
⭐Scaled Hand Grab Poses
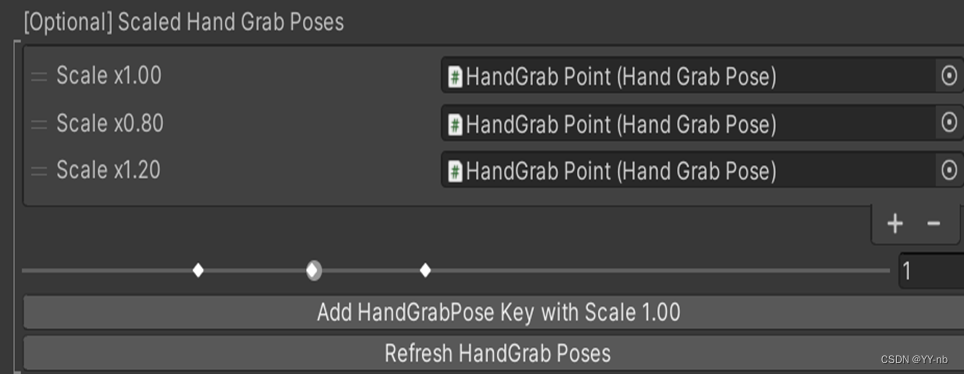
因为我们每个人的手部大小可能是不同的,设置Scaled Hand Grab Poses就可以为不同大小的手配备相应大小的抓取手势。
⭐Movement Provider
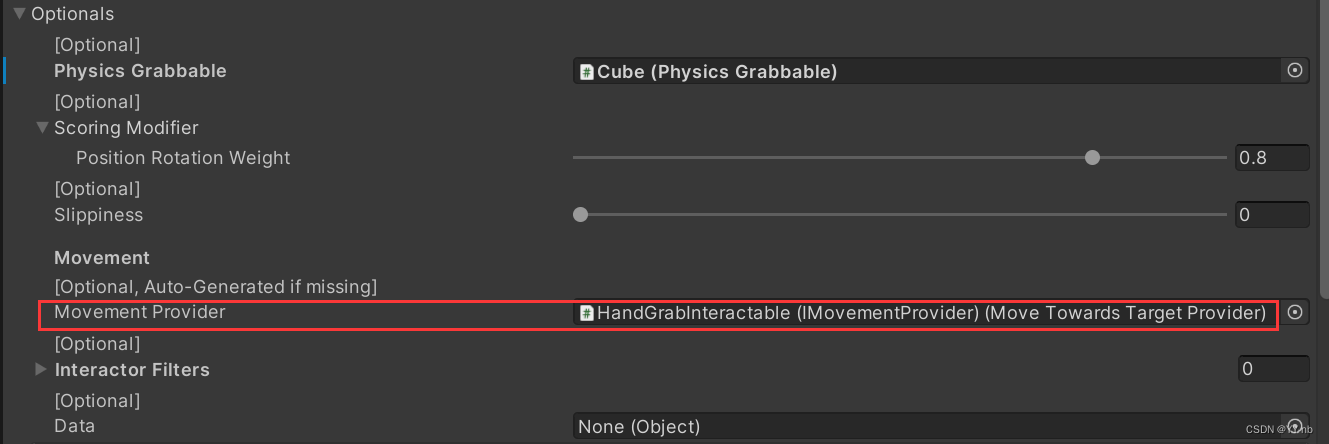
在 HandGrabInteractable 脚本的 Optionals 下,有一个 Movement Provider 参数,如果没有赋值,在程序运行后会在改该物体上自动添加上一个 MoveTowardsTargetProvider 脚本,然后给 Movement Provider 参数赋值。
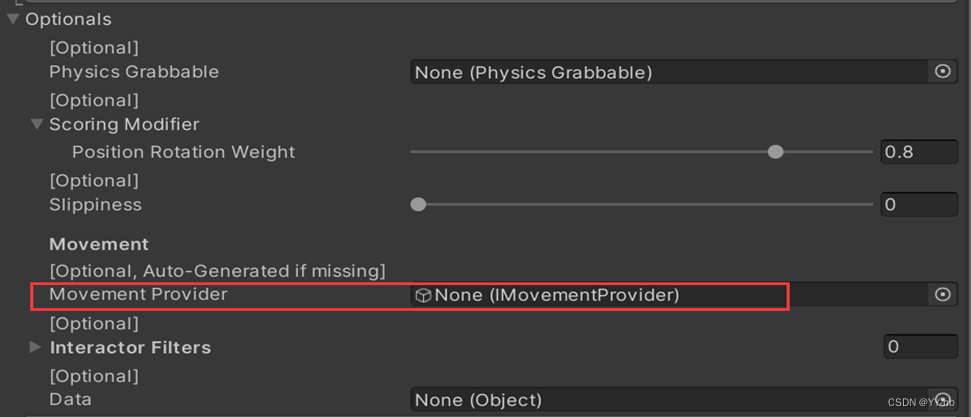
注:如果我们手动添加了 Movement Provider 类型的脚本,要手动给 Movement Provider 参数赋值。
这里介绍一下常用的几种的 Movement Provider:
🔍MoveTowardsTargetProvider
控制物体吸向手部的速度。
Travel Speed 越大,物体吸向手部所花的时间越多。
🔍MoveFromTargetProvider
抓取物体的时候,手部主动吸向物体,而不是物体吸向手部。

🔍FollowTargetProvider
让物体被抓取的时候吸向手部,但是带有阻尼衰减运动。也就是物体吸到手上时还会不停地晃,然后慢慢恢复正常状态。Speed 越小,阻尼效果越明显。