坐标系下的运动旋量转换
文章目录
- 坐标系下的运动旋量转换
- 前言
- 一、运动旋量
- 物体运动旋量
- 空间运动旋量
- 二、伴随变换矩阵
- 三、坐标系下运动旋量的转换
- 四、力旋量
- 五、总结
- 参考资料
前言
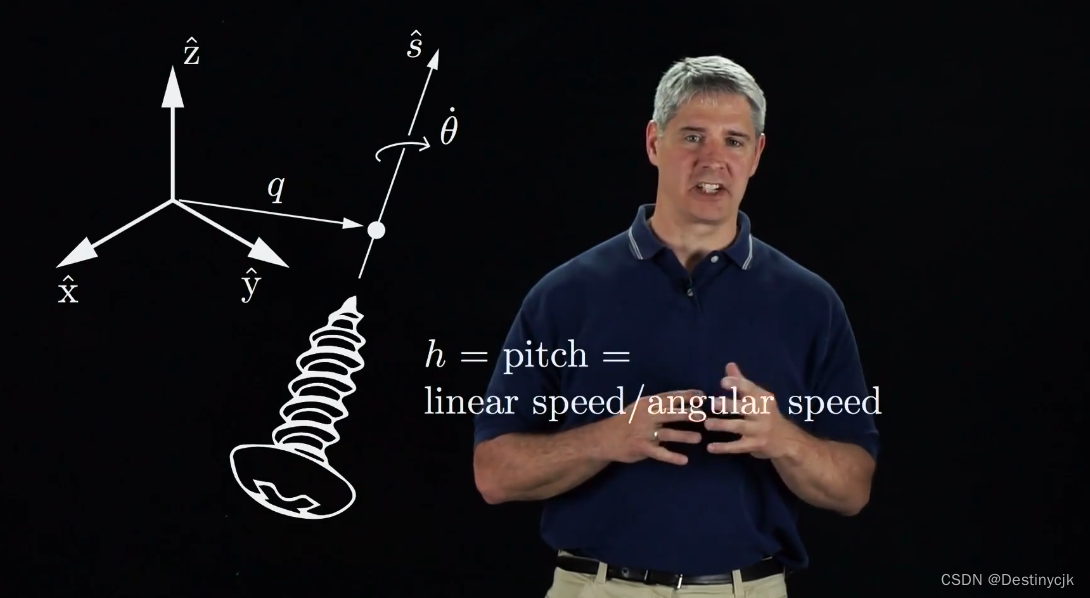
对于刚体而言,其角速度可以写为 ω ^ θ ˙ \hat {\omega} \dot \theta ω^θ˙,其中, ω ^ \hat\omega ω^为单位转轴, θ ˙ \dot \theta θ˙为绕着转轴转动的角速度大小。运动旋量则用来描述物体角速度与线速度的组合。由于在机器人学中,运动旋量可能需要描述在不同坐标系之下,本文参考凯文·M.林奇的《现代机器人学》,对运动旋量概念与坐标系下的运动旋量转换进行梳理与总结,便于自己后续回忆。
一、运动旋量
首先,定义有单位螺旋轴 S = ( ω , v x , v y , v z ) ( ω = 1 ) S=(\omega,v_x,v_y,v_z)(\omega=1) S=(ω,vx,vy,vz)(ω=1),利用旋转速度 θ ˙ \dot\theta θ˙与之相乘,由此可得运动旋量 V = S θ ˙ V=S\dot\theta V=Sθ˙。这里注意:通过绕螺旋轴 S S S转动 θ \theta θ角的位移与以速度 θ ˙ = θ \dot\theta=\theta θ˙=θ绕螺旋轴 S S S转动单位时间完全相等,因此, V = S θ ˙ V=S\dot\theta V=Sθ˙可同样看作为指数坐标(刚体转动的指数坐标,可以等效为单位转轴 ω ^ ( ω ^ ∈ R 3 , ∣ ∣ ω ^ ∣ ∣ = 1 ) \hat\omega(\hat\omega\in R^3,||\hat\omega||=1) ω^(ω^∈R3,∣∣ω^∣∣=1))与绕该轴线的转角 θ ∈ R \theta\in R θ∈R。
在对运动旋量有了大致了解以后,正式进入正题,即何为物体运动旋量、何为空间运动旋量。
物体运动旋量
首先,用 { s } \{s\} {s}与 { b } \{b\} {b}分别描述固定(空间)坐标系和移动(物体)坐标系。则有
T s b ( t ) = [ R ( t ) p ( t ) 0 1 ] T_{sb}(t)=\begin{bmatrix} R(t) & p(t) \\ \pmb0 & 1 \end{bmatrix} Tsb(t)=[R(t)0p(t)1]
其中, T s b T_{sb} Tsb表示从空间坐标系到物体坐标系的转换集合矩阵,后续可用 T T T代替。令 T − 1 T ˙ T^{-1}\dot T T−1T˙,则有
T − 1 T ˙ = [ R T − R T p 0 1 ] [ R ˙ p ˙ 0 0 ] = [ R T R ˙ R T p ˙ 0 1 ] T^{-1}\dot T=\begin{bmatrix} R^T & -R^Tp \\ \pmb0 & 1 \end{bmatrix}\begin{bmatrix} \dot R & \dot p \\ \pmb0 & 0 \end{bmatrix}=\begin{bmatrix} R^T\dot R & R^T\dot p \\ \pmb0 & 1 \end{bmatrix} T−1T˙=[RT0−RTp1][R˙0p˙0]=[RTR˙0RTp˙1]
其中, R T R ˙ = R − 1 R ˙ = [ ω b ] R^T\dot R=R^{-1}\dot R=[\omega_b] RTR˙=R−1R˙=[ωb],这里的 [ ω b ] [\omega_b] [ωb]即为物体坐标系 { b } \{b\} {b}下的刚体角速度的反对称矩阵, [ ∗ ] [*] [∗]符号代表 ∗ * ∗的反对称矩阵。具体证明过程可参考书籍,这里不再展开。同理, p ˙ \dot p p˙代表坐标系 { s } \{s\} {s}中描述的 { b } \{b\} {b}的原点的线速度,因此, R T p ˙ = R − 1 p ˙ = v b R^T\dot p=R^{-1}\dot p=v_b RTp˙=R−1p˙=vb则为在物体坐标系 { b } \{b\} {b}中描述 { s } \{s\} {s}的原点的线速度。可进一步阐述为: T − 1 T ˙ T^{-1}\dot T T−1T˙表示动坐标系相对于当前与其瞬时重合的静坐标系 { b } \{b\} {b}的线速度与角速度。
构造六维向量 V b = [ ω b v b ] V_b=\begin{bmatrix} \omega_b \\ v_b \end{bmatrix} Vb=[ωbvb],定义其为物体坐标系中的速度,简称为物体运动旋量。写为矩阵形式为
T − 1 T ˙ = [ V b ] = [ [ ω b ] v b 0 1 ] ∈ s e ( 3 ) T^{-1}\dot T=[V_b]=\begin{bmatrix} [\omega_b] & v_b \\ \pmb0 & 1 \end{bmatrix} \in se(3) T−1T˙=[Vb]=[[ωb]0vb1]∈se(3)
这里可以注意,六维向量 V b V_b Vb的反对称矩阵的撰写形式,即原部矢量 w b w_b wb取反对称形式,偶部矢量不改变形式。
空间运动旋量
同理,可以推导 T ˙ T − 1 \dot TT^{-1} T˙T−1有
V s = [ ω s v s ] ∈ R 6 , T ˙ T − 1 = [ V s ] = [ [ w s ] v s 0 1 ] ∈ s e ( 3 ) V_s=\begin{bmatrix} \omega_s \\ v_s \end{bmatrix} \in R^6, \dot TT^{-1}=[V_s]=\begin{bmatrix} [w_s] & v_s \\ \pmb0 & 1 \end{bmatrix} \in se(3) Vs=[ωsvs]∈R6,T˙T−1=[Vs]=[[ws]0vs1]∈se(3)
此时, V s V_s Vs描述空间固定坐标系中的速度,因此被称为空间运动旋量。
二、伴随变换矩阵
在第一节中,描绘了分别在两个坐标系下的运动旋量,即 V b V_b Vb与 V s V_s Vs,那么,如果我们已知这两个坐标系的转换矩阵 T s b = ( R s b , p s b ) ∈ S E ( 3 ) T_{sb}=(R_{sb},p_{sb})\in SE(3) Tsb=(Rsb,psb)∈SE(3),我们是否可以对这两个运动旋量建立联系呢?答案就是伴随变换矩阵。即有
V s = [ ω s v s ] = [ A d T s b ] V b = [ R s b 0 [ p s b ] R s b R s b ] [ ω b v b ] V_s=\begin{bmatrix} \omega_s \\ v_s \end{bmatrix}=[Ad_{T_{sb}}]V_b=\begin{bmatrix} R_{sb} & \pmb 0\\ [p_{sb}]R_{sb} & R_{sb} \end{bmatrix} \begin{bmatrix} \omega_b \\ v_b \end{bmatrix} Vs=[ωsvs]=[AdTsb]Vb=[Rsb[psb]Rsb0Rsb][ωbvb]
其中, [ A d T s b ] = [ R s b 0 [ p s b ] R s b R s b ] ∈ R 6 × 6 [Ad_{T_{sb}}]=\begin{bmatrix} R_{sb} & \pmb 0\\ [p_{sb}]R_{sb} & R_{sb} \end{bmatrix} \in R^{6\times6} [AdTsb]=[Rsb[psb]Rsb0Rsb]∈R6×6即为该伴随变换矩阵。
将其化为矩阵形式,则有
[ V s ] = T s b [ V b ] T − 1 [V_s]=T_{sb}[V_b]T^{-1} [Vs]=Tsb[Vb]T−1
三、坐标系下运动旋量的转换
结合第二、三节内容,即可总结空间、物体坐标系下运动旋量的转换关系: T s b ( t ) = T ( t ) = [ R ( t ) p ( t ) 0 1 ] ∈ S E ( 3 ) T_{sb}(t)=T(t)=\begin{bmatrix} R(t) & p(t)\\ \pmb0 & 1 \end{bmatrix}\in SE(3) Tsb(t)=T(t)=[R(t)0p(t)1]∈SE(3)仍表示固定坐标系 { s } \{s\} {s}到物体坐标系 { b } \{b\} {b}的位姿转换矩阵(这里的 S E ( 3 ) SE(3) SE(3)即为一种特殊李群)。则有
物体运动旋量(body twist)
T − 1 T ˙ = [ V b ] = [ [ ω b ] v b 0 1 ] ∈ s e ( 3 ) T^{-1}\dot T=[V_b]=\begin{bmatrix} [\omega_b] & v_b \\ \pmb0 & 1 \end{bmatrix} \in se(3) T−1T˙=[Vb]=[[ωb]0vb1]∈se(3)
空间运动旋量(spatial twist)
T ˙ T − 1 = [ V s ] = [ [ ω s ] v s 0 1 ] ∈ s e ( 3 ) \dot TT^{-1}=[V_s]=\begin{bmatrix} [\omega_s] & v_s \\ \pmb0 & 1 \end{bmatrix} \in se(3) T˙T−1=[Vs]=[[ωs]0vs1]∈se(3)
运动旋量 V b V_b Vb与 V s V_s Vs存在关系为
V s = [ ω s v s ] = [ R s b 0 [ p s b ] R s b R s b ] [ ω b v b ] = [ A d T s b ] V b V_s=\begin{bmatrix} \omega_s \\ v_s \end{bmatrix}=\begin{bmatrix} R_{sb} & \pmb 0\\ [p_{sb}]R_{sb} & R_{sb} \end{bmatrix} \begin{bmatrix} \omega_b \\ v_b \end{bmatrix}=[Ad_{T_{sb}}]V_b Vs=[ωsvs]=[Rsb[psb]Rsb0Rsb][ωbvb]=[AdTsb]Vb
V b = [ ω b v b ] = [ R s b T 0 − R s b T [ p s b ] R s b T ] [ ω s v s ] = [ A d T s b ] V s V_b=\begin{bmatrix} \omega_b \\ v_b \end{bmatrix}=\begin{bmatrix} R_{sb}^T & \pmb 0\\ -R_{sb}^T[p_{sb}] & R_{sb}^T \end{bmatrix} \begin{bmatrix} \omega_s \\ v_s \end{bmatrix}=[Ad_{T_{sb}}]V_s Vb=[ωbvb]=[RsbT−RsbT[psb]0RsbT][ωsvs]=[AdTsb]Vs
这里友情提示下,在《现代机器人学》第三次印刷本中,对于 V s V_s Vs到 V b V_b Vb的转换似乎存在小错误,不过问题不大,一般都能看出来,自行矫正即可。
四、力旋量
与运动旋量对应的,也存在着力旋量的定义。对作用于空间物体上的力矩 m a m_a ma与 f a f_a fa,同样可将其合成为六维的空间力的形式,其称为力旋量(wrench),在坐标系 { a } \{a\} {a}中可描述为
F a = [ m a f a ] ∈ R 6 F_a=\begin{bmatrix} m_a \\ f_a \end{bmatrix} \in R^6 Fa=[mafa]∈R6
如若作用于刚体的力旋量不唯一,即将其通过力旋量的六维形式直接相加即可。无力元素的力旋量则被称为纯力偶(pure moment)。
关于力旋量的转换关系,基于系统功率一定原则,最终可推导出:
F b = [ A d T a b T ] F a F_b=[Ad_{T_{ab}}^T]F_a Fb=[AdTabT]Fa
其中, F a F_a Fa与 F b F_b Fb分别为坐标系 { a } \{a\} {a}与坐标系 { b } \{b\} {b}中的力旋量, T a b T_{ab} Tab为坐标系 { a } \{a\} {a}到坐标系 { b } \{b\} {b}的转换矩阵。
五、总结
在学习运动旋量与李群李代数时,一开始感觉确实有些晦涩且难以理解,但是在反复学习时,又感觉其形式简洁且非常实用,因此在这里学习记录,供后续参考。
参考资料
【1】https://www.bilibili.com/video/BV1KV411Z7sC/?p=17&vd_source=029a7426f7a6cecb96f1969e1ce8aff7。
【2】现代机器人学:机构、规划与控制。
![[AI]ChatGPT4 与 ChatGPT3.5 区别有多大](https://img-blog.csdnimg.cn/fa98ee2c1eef427a88412f9bc6483e55.png)