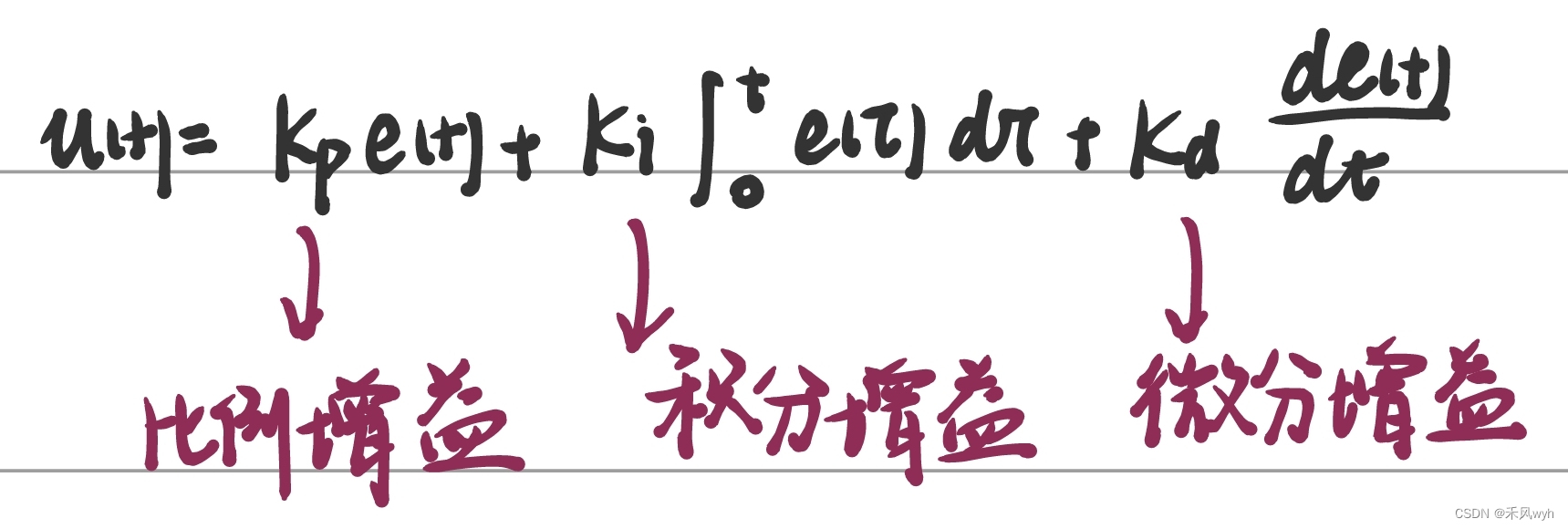
一、 PID公式
二、 PID应用的必要性
1. 四驱小车运动
| 左边两个驱动轮和右边两个驱动轮的速度相同 | 直线 |
| 右边轮子的速度大于左边轮子的速度 | 左偏 |
| 右边轮子的速度小于左边轮子的速度 | 右偏 |
2. 产生多种运动的原因
小车的4个电机,减速箱以及车轮在物理层面上存在误差,虽然给4个轮子通了相同pwm(电流),但是却没办法保证运行时车子的4个轮子的转速相同。
我们只知道通过改变电流让电机旋转起来,却不知道轮子的实际转速,所以没法保证小车跑直线。这就是开环控制。

3. 解决方案分析
小车跑偏就是因为小车现在的控制系统是开环的,只能用pwm控制电机让它旋转,并不知道轮子的实际速度是多少。
只有知道了方向是否发生了偏转,才能进一步对小车的运动方向进行控制调整。例如,往左偏了,我们就把右边的轮子速度降低一点。如果往右边偏了,我们就把边的轮子速度升高一点。
4. 解决方案
引入反馈信号:如果我们能得知车子的运动方向,就可以对车子的方向加以纠正,控制小车跑直线(闭环控制)。
(1)给小车安装电子陀螺仪
用它来测量小车运行的方向信号,从而控制单片机pwm的输出值(input)去修正电机的工作电流,从而修改轮子的实际速度(output),从而纠正小车的跑偏的问题,从而使用PID技术实现方向对小车方向的闭环控制。
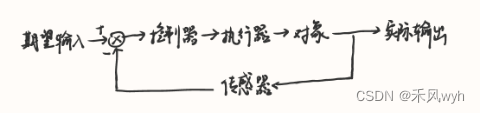
闭环比开环多了反馈信号feedback。我们这里的feedback信号选用了电子陀螺仪的偏转角(yaw值)。根据闭环控制,设计一个小车的实际控制方案,例如,保持左边的轮子速度不变,当车子向右发生偏转时,我就加快右边轮子的转速。当车子向左偏的时候,我就降低右边轮子的转速。
(2)确定反馈信号量和控制量之间的比例关系
| 方向没有发生改变 | 反馈为0 | 输出变化为0 ,不需要改变输出值 |
| 车子往右偏 | 改变右轮的速度 | 输入变化是?输出应该改变? |
| 车子往左偏 | 改变左轮的速度 | 输入变化是?输出应该改变? |
输入信号和输出信号存在一种比例关系,即传感器的值yaw和驱动电机的pwm的值存在一种比例关系(比例P)。方向偏的越多,那么右轮的pwm应该越大,方向偏的越少,右轮的pwm应该越少。方向偏的多少(偏差error)就是[yaw的目标值]-[yaw的当前值]。
出现的问题原因:左轮输入的Input和右轮驱动输入的Input是一样的,但是由于左轮和右轮的执行器有差异,导致左轮的Output1和右轮的Output2的值不一样。于是我们保持左轮依然使用开环系统,而把右轮系统改成可以调整转速的闭环系统。这样使得输入右轮系统的数值就不仅仅是Input了,还增加了电子陀螺仪反馈回来的偏转角(jaw)的误差值error。把这两个数值通过控制器处理后,再输入到执行器,让右轮最终产生的Output2等于左轮的Output1。
(3)在系统的Controller部分引用PID比例部分
pwm=error*Kp+input
error=yaw的目标值-yaw的当前值
根据error的值的大小设定一个比例系数Kp,Kp是一个系数常数,需要根据系统的性能手动设定。然后加上原来input,形成新的pwm值。
| 当小车发生右偏时 | 当小车发生左偏时 |
| 偏转角测量出来的当前测量值就会跟初始方向产生一个误差error | 偏转值跟初始方向同样产生一个error |
| 假设初始方向是1 | |
| 第一次测量测出来是0.2 | 第一次测量测出来是1.2 |
| error = 1-0.2=0.8,pwm就不等于input了,而是input+0.8Kp | error = 1 - 1.2 = - 0.2,pwm就不等于input了,而是input-0.2Kp |
| 由于0.8Kp是一个正数,所以最总pwm也就是升高了 | 由于-0.2Kp是一个负数,所以最终pwm也就是降低了 |
| 右轮的速度就会增加,小车开始往左,纠正小车右偏 | 右轮的速度就会减小,小车开始往右偏,纠正小车左偏 |
因为电子陀螺仪的采样率大概为100ms一次。所以需要在计算机里每100ms 采样一次得到yaw的值:error = [yaw的目标值]-[yaw的当前值]。新的pwm=error*Kp+input,用来驱动右轮的电机。
Kp值的选取:只有在Kp选取到一个合适的值,小车才能保持直线。
| Kp过大 | 震荡,小车会摇摆行驶 |
| Kp过小 | 纠正的不够,产生稳态误差 |
稳态误差产生的原因:纠正的过程中,当前的测量值会跟目标值越来越小,那么error就会变得很小,使得error*Kp 也会变得很小; error*Kp 由于过小就会失去纠正的作用,离目标值始终存在一个误差,称之为稳态误差。
(4)在系统的Controller部分引用PID积分部分
问题:合适的Kp是很难找的,我们可以引入E*Ki(误差的积分)。当 error*Kp 部分的量纠正不够的时候,可以靠 I 部分的量(对每100ms测量出来的误差进行累加)来补充上去。
假设:a. 开始向右偏转,只要不向左偏转,I 值是一直增加的。b. P 的输出一开始是比较猛的,但是当越来越靠近目标。c. 当 P 因误差 error 过小失去调整作用时,可以用 I 积分部分来弥补比例部分的稳态误差。
pwm = error * Kp + E * Ki + input,
E = 每次测量的error 的累加和,系统每100ms测量一次jaw的值,每次测量的jaw的值和jaw的目标值有一个差值,我称之为err,把每次测量的err累加在一起就是E。
| E*Ki 过大 | 会出现积分饱和,系统依然会振荡 |
| E*Ki 过小 | 纠正不够 |
(5)在系统的Controller部分引用PID微分部分
我们可以通过限制 I 的最大值的方法,来进行限制。也可以再增加一个微分量 D*Kd,Kd为系数常数。每100ms测量一次jaw偏转角,而D指的就是这一次的误差和上一次测量的误差之间的差值,是一个反映误差纠正快慢的量,重点是负值。
在图上看,就是图像变化陡峭的部分。当Input加上这个值以后,系统可以有效抑制运行过程中变化过快的部分,比如振荡期。而对变化缓慢的部分,比如稳定期,微分部分几乎就不起作用。有点像起一个柔和的缓冲作用。
pwm = error * Kp + E * Ki + D * Kd + input,
D=当前一次测量的error - 上一次测量的error,每100ms测量一次jaw,并计算出err,D反应的是系统的err变化率。所以err变化剧烈的区域,D会对总的输出值进行抑制,防止剧烈的振荡,而稳定之后的区域,D对输出值的影响就很小了。
三、程序编写
1. 核心公式
pwm = error * Kp + E * Ki + D * Kd + input
2. 相关参数及说明
| pwm | 控制左边轮子和右边轮子的速度 | 在650-899的范围内,pwm的值越大,轮子的速度越快。低于650时 小车不运动了。 |
| E | 每次测量的error加到一起 | 电子陀螺仪PDU6050测量的偏转角值为jaw。按下小车启动按键时,测量到的 jaw 就为目标值。之后每100ms测量出来的 jaw 值为当前值,用目标值减去当前值为每次测量的误差error |
| D | 0 | / |
最后每100ms 计算一次公式 pwm = error * Kp + E*Ki + D * Kd + input ,把计算出来的pwm值作为右轮的电机驱动的参数,代入电机的驱动程序里,根据实际场景调整一下系统参数Kp,Ki。