2023年7月8日,在全球瞩目的世界人工智能大会(WAIC)浦江东岸分会场,主题为“引领未来,赋能焕新”的“2023世界人工智能大会浦东论坛”隆重举办。浦东新区作为全国首个人工智能创新应用先导区,正打造上海人工智能产业发展高地,论坛期间更是发布了十大人工智能创新技术,上海几何伙伴智能驾驶有限公司G-PAL 1.0行泊一体智能驾驶解决方案,作为十大创新技术之一,于会上首次亮相并引起广泛关注。
 ▲G-PAL 1.0行泊一体智能驾驶解决方案
▲G-PAL 1.0行泊一体智能驾驶解决方案
助力智能驾驶降本增效 打造轻量级行泊一体解决方案
伴随着分布式向集中式演进的电子电气架构趋势,以及消费者对智能驾驶需求的增长,行业正大规模力推L2+级自动驾驶量产落地,行泊一体方案正逐渐被业界所关注。行泊一体指的是将智能驾驶与自动泊车功能集成在一个域控制器上,相较于此前行车和泊车分别开发的模式,其优势是传感器等硬件复用可大大节约成本,同时软件配置更加灵活,功能迭代开发效率也可有效提高。
在“降本增效”奏响2023年整个汽车行业“主旋律”的当下,以“单SoC芯片配置”为主的轻量级行泊一体方案正成为智能驾驶赛道众多玩家更加青睐的选择。该方案将所有传感器的信号全部接入到一块SoC芯片为主的域控制器上,在软件算法的作用下,能够实现传感器和计算资源的深度复用与共享,既保证性能优势,又极具性价比。作为深谙客户需求、致力于提供高性价比产品的智能/自动驾驶整体解决方案供应商,几何伙伴打造出了G-PAL 1.0行泊一体智能驾驶解决方案。
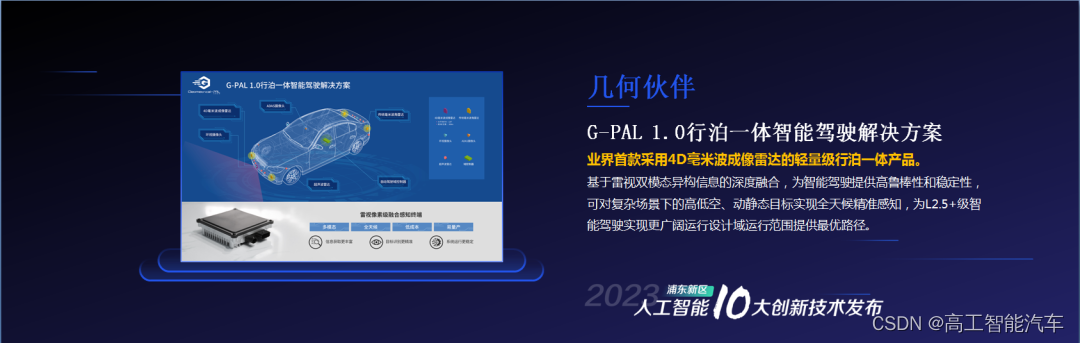
G-PAL 1.0行泊一体智能驾驶解决方案是一款全天候、高可靠、低成本、满足车规级标准设计的轻量级行泊一体产品,同时也是业界首款采用4D毫米波成像雷达的轻量级行泊一体产品。
该方案采用5R5V12USS感知方案,将前视摄像头升级为8MP模组,并将前向毫米波雷达无缝升级为4D毫米波成像雷达,再基于雷视双模态异构信息的深度融合,为智能驾驶提供高鲁棒性和稳定性的行泊一体解决方案,可对复杂场景下的高低空、动静态目标实现全天候精准感知。
基于以上配置,该方案能实现L2.5+级行泊功能应用,行车方面提供ACC、AEB、FCW、LKA、ELKA、LDW、FCTA/B、BSD、LCA、RCTA/B、DOW、TJA、ICA、HWA等辅助驾驶功能,泊车方面提供AVM、APA、RPA、TBA等辅助泊车功能。在复杂道路场景应用(见下图)中,具有显著的提升作用,大大提高了系统安全冗余与运行体验,为L2.5+级智能驾驶实现更广阔ODD运行范围提供最优路径。
静止车辆识别与“鬼探头”识别
▲静止车辆识别与“鬼探头”识别:能够准确识别在本车道前的故障/静止车辆,以及更精准的识别行人/非机动车“鬼探头”,提前为AEB留出更多的决策制动空间,提升AEB性能,提高行车安全性。
▲高空障碍物识别:能够精准识别高空障碍物,并准确判断安全通行高度(特别是横杆无高度标识时),减少AEB“幽灵刹车(误刹车)”,提升ACC巡航的舒适性。
▲地面低矮目标识别:能够准确识别锥桶、地缝等低矮目标,判断是否可以安全通行,并根据结果,提前做出减速、紧急制动、偏移避让等反应,从而提高行车安全性和舒适性。(如望了解更多场景示例,可联系邮箱info geometricalpal.com)
技术创新迭代升级 整体方案实现超高性价比
G-PAL 1.0行泊一体智能驾驶解决方案通过将前向毫米波雷达升级为4D毫米波成像雷达,大大提高了方案的可靠性与安全性,感知能力处于行业领先。
 ▲几何伙伴4D毫米波成像雷达
▲几何伙伴4D毫米波成像雷达
4D毫米波成像雷达是几何伙伴针对自动驾驶复杂场景需求而自主研发的核心传感器,当下自动驾驶行业高速发展,业内对于汽车雷达在分辨率、探测精度和可靠性等感知性能方面提出了更高要求,作为传感器之一的传统毫米波雷达,因其存在测高能力不足、点云稀疏、静态目标探测能力弱等行业痛点问题,已显得“心余力绌”。基于此,几何伙伴自研出了高分辨率4D毫米波成像雷达,在传统毫米波雷达全天时全天候感知优势的基础上,通过信号处理算法等优化,每秒能够输出超60000点的高质量点云,使得毫米波雷达具备成像能力;再结合视觉等其他传感器进行双模态异构信息深度融合,大幅度提升各种复杂场景下全天时全天候对动静态目标的精准识别,感知能力有了质的提升。
几何伙伴点云+OD+SLAM技术视频
▲几何伙伴点云+OD+SLAM技术视频
此外,G-PAL 1.0行泊一体智能驾驶解决方案还具备高效智能化数据闭环能力。数据驱动的机器学习方法正逐渐取代传统基于规则的方法,面对这样的行业趋势,几何伙伴构造了高效智能化数据闭环系统,打通了数据采集、数据上传、数据清洗、数据挖掘、数据标注、模型训练、模型验证、模型部署的闭环链路。
特色包括:(1)自动化标注:采用多帧时序处理大模型框架及基于资源感知和需求驱动的模型分布式训练方法,可快速对采集数据进行3D场景目标的精准自动化标注。(2)全天时全天候数据积累:涵盖高速高架、城区道路、晴雨天等多种工况和天候下的数据;(3)雷视融合数据库构建:4D毫米波成像雷达点云图像+视觉图像标注数据库的构建,弥补了当前行业内缺乏此类专业级数据库的不足,具备了数据开源并服务于全行业的条件。依靠数据闭环优势,该方案可以通过OTA进行迭代升级,不断提升产品性能和功能体验。
 ▲几何伙伴数据处理闭环流程
▲几何伙伴数据处理闭环流程
对标市场其他轻量级传统解决方案,几何伙伴G-PAL 1.0行泊一体智能驾驶解决方案通过配备高分辨率4D毫米波成像雷达与高效智能化数据闭环系统,能够满足用户多种需求,同时无需增加硬件成本,具备超高性价比。
市场应用前景广阔 商业化量产之路蓄力升级
在辅助驾驶逐渐成为标配的时代,行泊一体已成为车企弯道超车、抢占智能化高地的新选择,并成为了智能驾驶量产的新趋势。据预测,2023年开始,新车的行泊一体前装标配搭载率正进入快速上升通道,预计到2025年将超过40%,未来三年行泊一体市场空间将高达1000万辆。面对广阔的市场应用前景,凭借强大的研发实力,几何伙伴在前期已经获得了上汽、一汽、小米、德国博世等多家主机厂和顶尖Tier 1的高度认可与紧密合作,并已开始小规模量产交付。
为加快自动驾驶商业化落地,几何伙伴大规模量产也开始提上日程。公司车规级智能制造基地已于今年6月正式落成,可达到年产量百万级规模的产品交付能力,以保障产品稳定、安全、高质量投产。
执笔绘梦,赋能未来。在用户的需求驱动与产业智能化的推动下,G-PAL 1.0行泊一体智能驾驶解决方案商业化将日益走向成熟。未来,几何伙伴将继续充分发挥自身优势,寻求技术突破,围绕行业需求,提供更具性价比与更优用户体验的智能驾驶解决方案,包括5R6V12USS配置的G-PAL2.0方案,8R11V单SoC芯片配置的G-PAL3.0方案等,以全面满足不同价位、不同动力车型的量产落地需求,为当前智能驾驶和自动驾驶市场带来更可靠、更具性价比的选择,助力高阶自动驾驶时代的到来。