目录
一,介绍
二,原理
三,PBD算法
手动实现PBD的拉伸
一,介绍
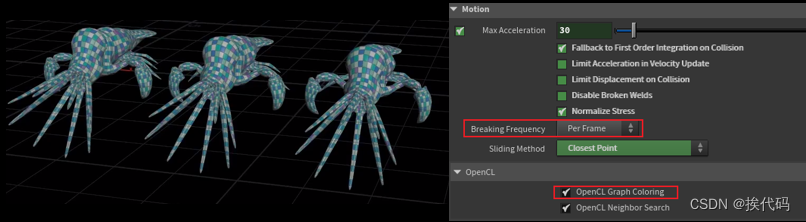
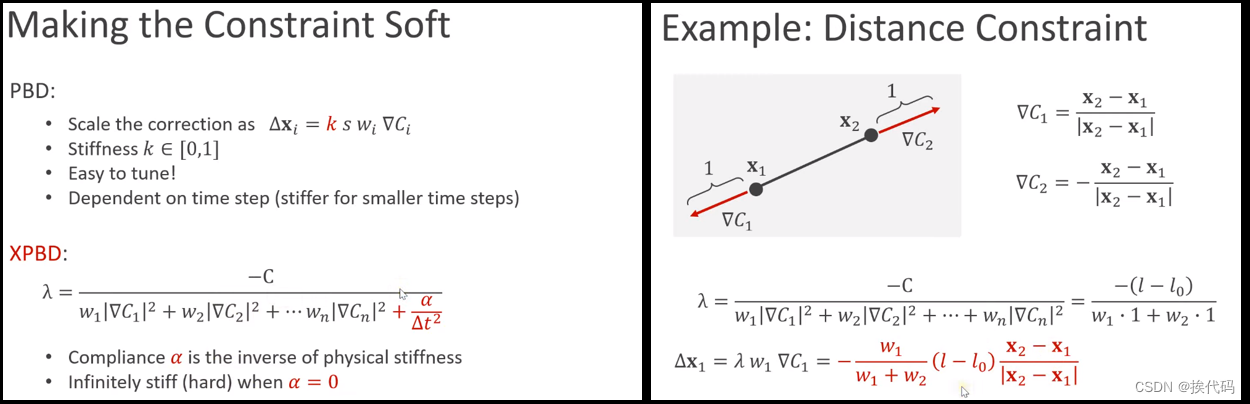
Vellum是一个解算模拟框架,使用更高级的PBD(XPBD,extended position based dynamics),是2nd Order Integration(传统的PBD使用的是1nd Order Integration),不像PBD子步和迭代次数的刚性依赖(迭代越多越硬);由于Vellum Solver需对约束重复计算,为提高效率并行计算,引入Graph Color技术;Grain是使用PBD来模拟沙子或颗粒物的;

可被用于创建许多不同的东西,包括cloth、hair、softbodies、balloons、及grains;基于位置方法的主要优势,是其可控、稳定、快速生成可信结果;GPU友好对于并行约束解算,特别是使用graph color(Breaking Frequency会re-color);
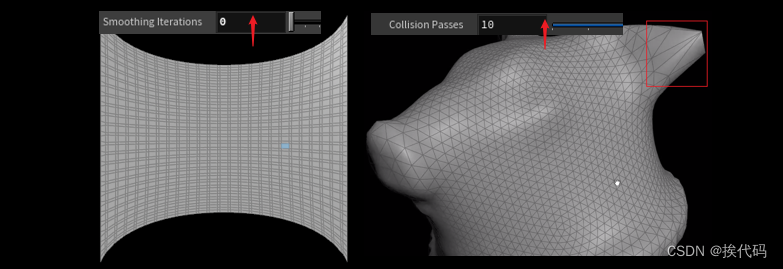
Constraint Iteration约束迭代,对于高刚性和高精度使用更高的约束迭代,提高子步效果更好但也更贵;Collision Iteration碰撞迭代,关联到detangle节点,在约束迭代间穿插执行;Smooth Iteration平滑迭代,默认约束迭代使用Gauss-Seidel方法快速收敛,对于不可能的配置(如无限刚性和0.5倍的restlength)等无法完全收敛的则使用Jacobi方法更慢的收敛来分散错误;
每个vellum类型均可相互交互,即可直接将各个类型的发射源合并(merge)起来,还可使用POP Force,POP Stream等;通常cloth使用三角面;
几种类型的柔体:
- Cloth + Pressure,vellum configure balloon
- Cloth + Structs,vellum configure struct softbody
- Distance along edges + Tetrahedral volume
- Tet Conform + Tetrahedral Stretch,vellum configure Tetrahedral softbody
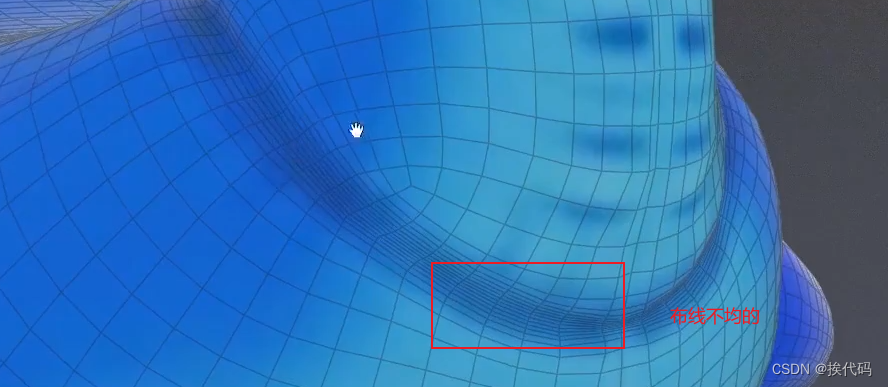
对布线不均的模型,应remesh使对象均匀布线,以为后续解算,最后在用解算的对象驱动原模型;
二,原理
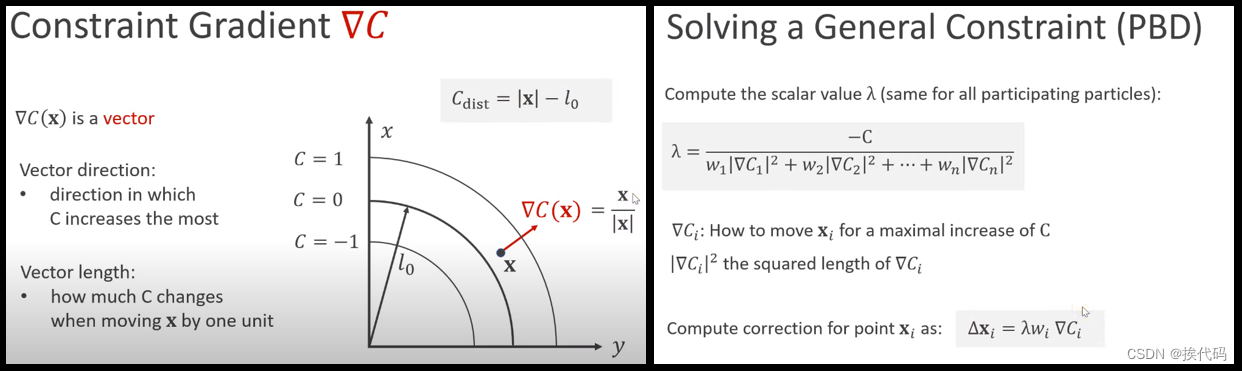
本质上是点(有碰撞半径的球)及约束组成,PBD是一个动态系统,试图一个点一个点地relax约束和碰撞,只有再足够高的迭代次数下才会产生合理的结果;
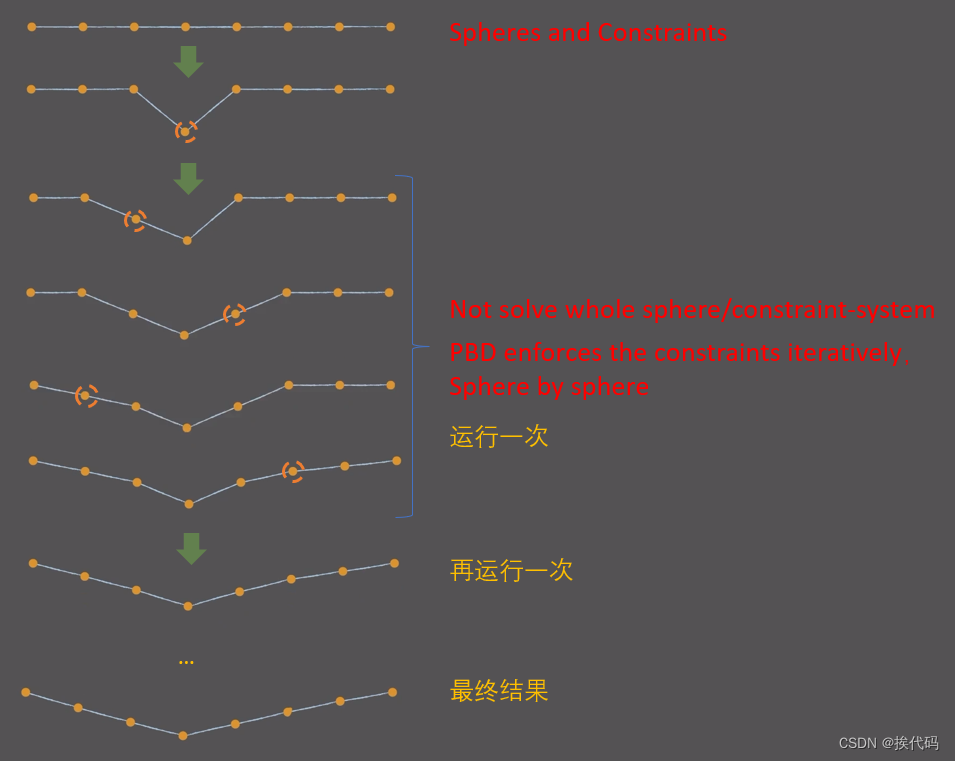
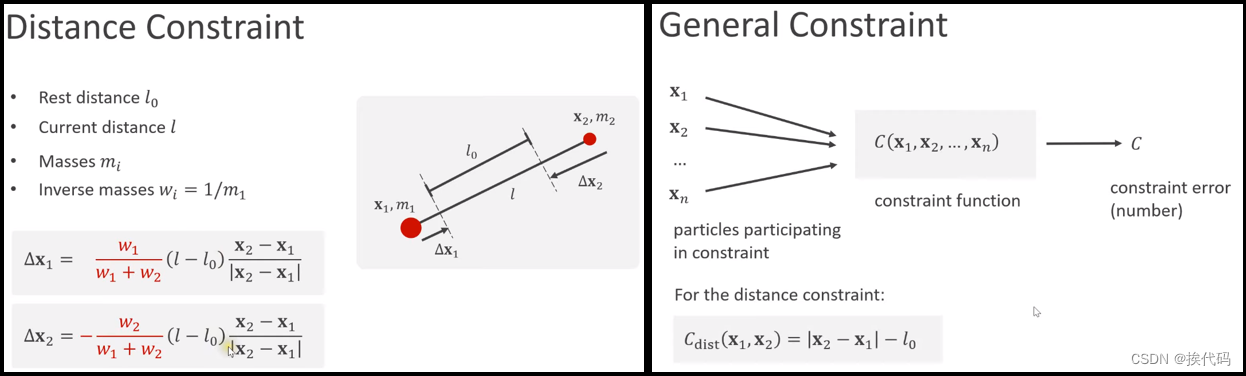
有三种类型的约束:Distance/Length/Stretch 保持点间的距离(可认为是线性弹簧),Rotational/Bend 保持面间的角度(可认为是旋转弹簧),Volume 保持几何体的体积(tetrahedron); 在实际应用中,可以是其中一种或多种的组合;

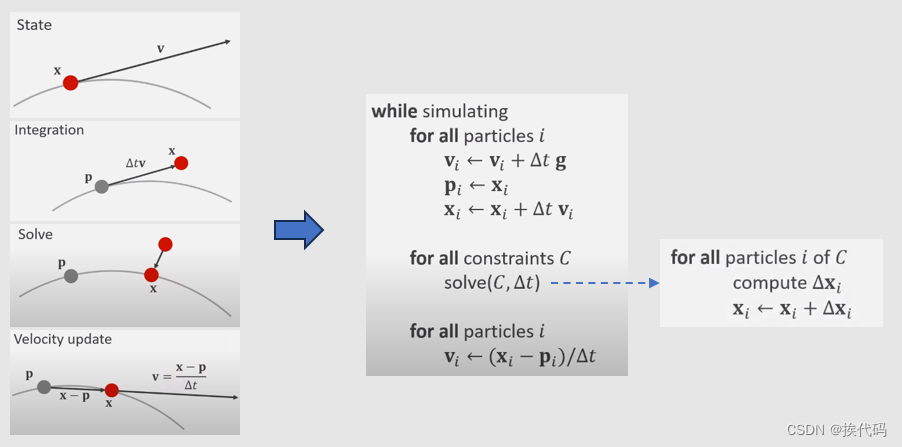
三,PBD算法
- 循环所有粒子,根据力及速度,计算新位置
;
- 循环所有约束,修正新位置
- 循环所有粒子,根据最终的位置和起始位置,更新速度
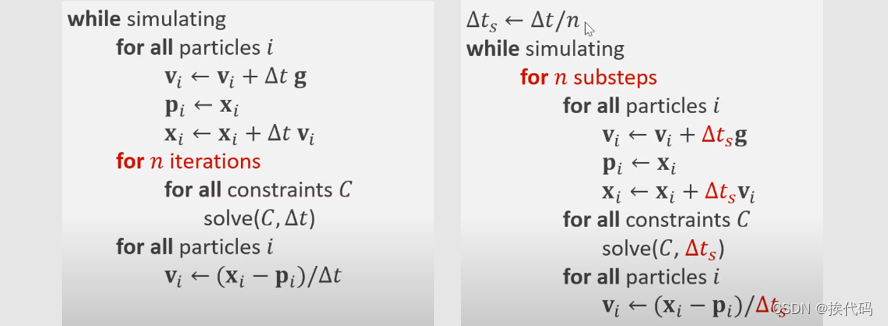
迭代iteration和子步sub-steps
【文献导读】XPBD: Position-Based Simulation of Compliant Constrained Dynamics_beidou111的博客-CSDN博客
【物理模拟】PBD算法详解-CSDN博客
手动实现PBD的拉伸
参考: Implementing A Position Based Cloth Solver From Scratch – Entagma
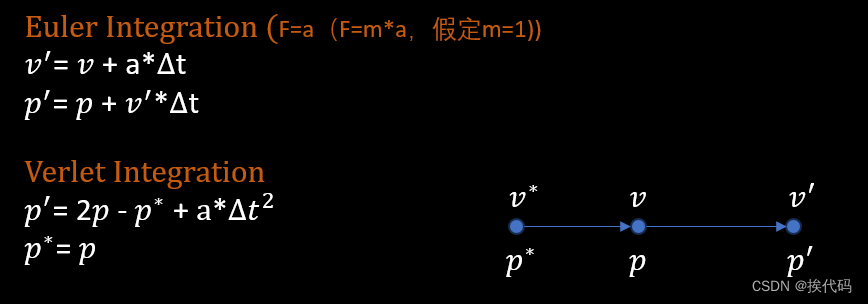
// Verlet Integration
vector cur_P = @P;
vector old_P = v@old_P;
vector force = v@force;@P = 2*@P - old_P + force * pow(@TimeInc,2);@old_P = cur_P;
//satisfy constraints
int constraints[] = pointprims(1, @ptnum);vector displacement = set(0,0,0);
float weight = 0;foreach(int con; constraints){int con_pts[] = primpoints(1, con);vector posa = point(0, 'P', con_pts[0]);vector posb = point(0, 'P', con_pts[1]);vector delta = posa - posb;float delta_len = length(delta);float restlength = prim(1, 'restlength', con); float error = (restlength - delta_len) * 0.5;float dir = 1;if(con_pts[0] != @ptnum)dir = -1;displacement += normalize(delta) * error * dir;weight += 1.0;
}@P += displacement/weight;