作业1
题目:
使用驱动代码实现如下要求
应用程序通过阻塞的io模型来读取number变量的值
number是内核驱动中的一个变量
number的值随着按键按下而改变(按键中断)
例如 number=o 按下按键 number=1,再次按下按键 number=0
在按下按键的时候需要同时将1ed1的状态取反
驱动中需要编写字符设备驱动
驱动中需要自动创建设备节点
这个驱动需要的所有设备信息放在设备树的同一个节点中
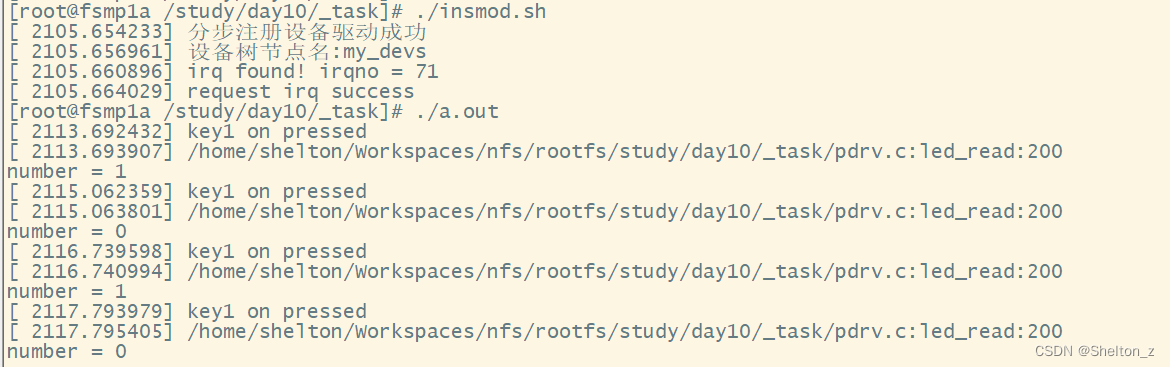
结果
代码:
pdrv.c
#include <linux/cdev.h> // 注册设备头文件
#include <linux/device.h>
#include <linux/fs.h> //定义文件操作结构体头文件
#include <linux/gpio.h>
#include <linux/init.h>
#include <linux/interrupt.h>
#include <linux/ioctl.h>
#include <linux/module.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/platform_device.h>// GPIO控制
#define LED_ON _IO('l', 1) // 1开 2关
#define LED_OFF _IO('l', 2)// 读
ssize_t led_read(struct file *file, char *ubuf, size_t size, loff_t *lof);
// GPIO控制
long led_ioctl(struct file *file, unsigned int cmd, unsigned long arg);// 初始化驱动
int pdrv_probe(struct platform_device *pdev);
// 卸载驱动
int pdrv_remove(struct platform_device *pdev);//构建设备树匹配的表
struct of_device_id of_table[]={{.compatible="hqyj,my_devs",}, {},
};// 驱动结构体
struct platform_driver pdrv={.probe=pdrv_probe,.remove=pdrv_remove,.driver={.name="led", .of_match_table=of_table,//设置设备树匹配},};// 创建文件IO对象
struct file_operations fops = {.read = led_read,.unlocked_ioctl = led_ioctl,
};// 读取相关
unsigned int number = 0; // 变量
unsigned int condition = 0;
wait_queue_head_t wq_head; // 定义等待队列头// 注册设备驱动
struct cdev *cdev_ptr; // 字符设备驱动对象
dev_t devno; // 设备号
int major = 255; // 主设备号
int minor = 0; // 次设备号
struct class *cls_ptr; // 提交目录
struct device *dev_prt; // 设备节点信息// 设备树解析GPIO
struct device_node *dnode; // 设备树父节点
struct gpio_desc *gpiono; // gpio编号 led1// 中断相关
unsigned int irqno;
struct tasklet_struct tasklet; // 中断底半部任务队列对象/*** @brief 分步注册设备*/
static int step_regist(void)
{int ret;// 1.分配字符设备驱动对象空间cdev_ptr = cdev_alloc();if (cdev_ptr == NULL) {printk("申请字符设备驱动对象空间失败\n");ret = -EFAULT;goto out;}// 2.字符设备驱动对象部分初始化cdev_init(cdev_ptr, &fops);// 3.申请设备号ret = alloc_chrdev_region(&devno, minor, 0, "my_led");if (ret) {printk("动态指定设备号失败\n");goto out2;}// 4.注册字符设备驱动对象 cdev_addret = cdev_add(cdev_ptr, MKDEV(major, minor), 1);if (ret) {printk("注册字符设备驱动对象失败\n");goto out3;}// 5.向上提交目录 class_createcls_ptr = class_create(THIS_MODULE, "my_led");if (IS_ERR(cls_ptr)) {printk("向上提交目录失败\n");ret = -PTR_ERR(cls_ptr);goto out4;}// 6.向上提交设备节点dev_prt = device_create(cls_ptr, NULL, MKDEV(major, 0), NULL, "my_led");if (IS_ERR(dev_prt)) {printk("向上提交节点信息失败\n");ret = -PTR_ERR(dev_prt);goto out5;}return 0;out5:device_destroy(cls_ptr, MKDEV(major, 0));class_destroy(cls_ptr);
out4:cdev_del(cdev_ptr);
out3:unregister_chrdev_region(MKDEV(major, minor), 1);
out2:kfree(cdev_ptr);
out:return ret;
}/*** @brief 删除设备注册*/
static int rm_regist(void)
{// 1.销毁设备信息 device_destroydevice_destroy(cls_ptr, MKDEV(major, 0));// 2.销毁目录 class_destroyclass_destroy(cls_ptr);// 3.注销对象 cdev_del()cdev_del(cdev_ptr);// 4.释放设备号 unregister_chrdev_region()unregister_chrdev_region(MKDEV(major, minor), 1);// 5.释放对象空间 kfree()kfree(cdev_ptr);return 0;
}/*** @brief 中断回调函数*/
static irqreturn_t interrupt_handler(int irqno, void *dev_id)
{int ret;printk("key1 on pressed\n");ret = gpiod_get_value(gpiono);switch (ret) {case 0:gpiod_set_value(gpiono, 1);break;case 1:gpiod_set_value(gpiono, 0);break;}// 开启中断底半部tasklet_schedule(&tasklet);return IRQ_HANDLED;
}/*** @brief 中断底半部任务队列回调函数*/
static void tasklet_handler(struct tasklet_struct *tasklet)
{number = !number;condition = 1;wake_up_interruptible(&wq_head); // 将进程唤醒
}// 读
ssize_t led_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{int ret;if (sizeof(number) < size)size = sizeof(number);wait_event_interruptible(wq_head, condition); // 将进程切换为休眠ret = copy_to_user(ubuf, &number, size);if (ret) {printk("copy_tO_user filed\n");return -EIO;}printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);condition = 0; // 表示下一次硬件数据没有准备好return 0;
}// GPIO控制
long led_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{// unsigned int dev_selected = (int)(file->private_data + 1);if (cmd == LED_ON)gpiod_set_value(gpiono, 1);else if (cmd == LED_OFF)gpiod_set_value(gpiono, 0);return 0;
}// 注册驱动
int pdrv_probe(struct platform_device *pdev) {int ret;// 注册字符设备文件ret = step_regist();if (ret)return ret;printk("分步注册设备驱动成功\n");// 解析设备树文件dnode = of_find_node_by_path("/my_devs");if (!dnode) {printk(KERN_ALERT "dnode is null\n");return -ENXIO;}printk("设备树节点名:%s\n", dnode->name);gpiono = gpiod_get_from_of_node(dnode, "led1", 0, GPIOD_OUT_LOW, NULL);// 等待队列相关init_waitqueue_head(&wq_head); // 初始化等待队列头// 初始化任务队列tasklet_setup(&tasklet, tasklet_handler);// 中断初始化irqno = irq_of_parse_and_map(dnode, 0); // 从设备树节点中获取获取软中断号if (!irqno) {printk(KERN_ALERT "can't find irq\n");return -ENOMEM;}printk("irq found! irqno = %d\n", irqno);ret = request_irq(irqno, interrupt_handler, IRQF_TRIGGER_FALLING, "key", NULL); // 注册中断号if (ret) {printk(KERN_ALERT "request irq failed\n");return ret;}printk("request irq success\n");return 0;
}// 卸载驱动
int pdrv_remove(struct platform_device *pdev) {// 注销中断号free_irq(irqno, NULL);// 删除字符设备文件rm_regist();// 释放gpio编号gpiod_put(gpiono);return 0;
}module_platform_driver(pdrv);
MODULE_LICENSE("GPL");