目标
• 图像梯度,图像边界等
• 使用到的函数有:cv2.Sobel(),cv2.Schar(),cv2.Laplacian() 等
原理
梯度简单来说就是求导。
OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr 和 Laplacian。我们会意义介绍他们。
Sobel,Scharr 其实就是求一阶或二阶导数。Scharr 是对 Sobel(使用小的卷积核求解求解梯度角度时)的优化。Laplacian 是求二阶导数。
1.Sobel 算子和 Scharr 算子
Sobel 算子是高斯平滑与微分操作的结合体,所以它的抗噪声能力很好。 你可以设定求导的方向(xorder 或
yorder)。还可以设定使用的卷积核的大 小(ksize)。
import cv2
import numpy as np
# 读取灰度图像
img = cv2.imread(r"C:\Users\mzd\Desktop\opencv\images.jpg", cv2.IMREAD_GRAYSCALE)
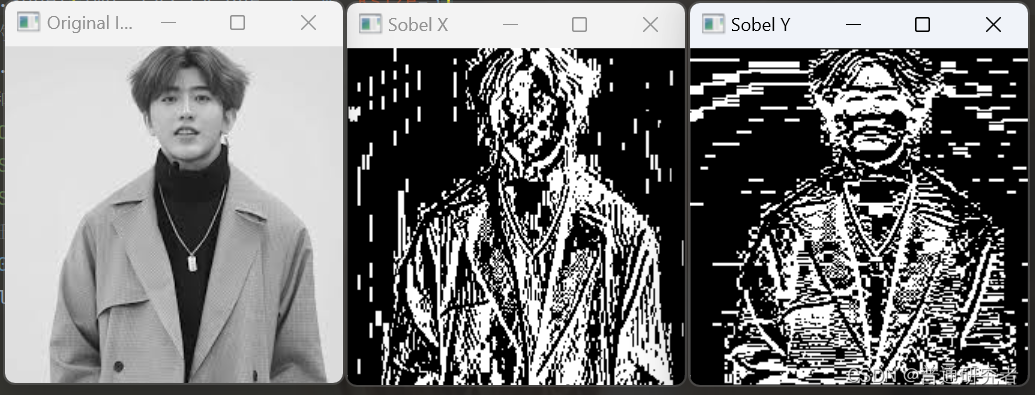
# 计算水平方向的Sobel梯度
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
# 计算垂直方向的Sobel梯度
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
# 显示原始图像和Sobel梯度图像
cv2.imshow('Original Image', img)
cv2.imshow('Sobel X', sobelx)
cv2.imshow('Sobel Y', sobely)
# 等待用户按下任意键
cv2.waitKey(0)
cv2.destroyAllWindows()
图像梯度是图像中灰度变化的一种度量,通常用于检测图像中的边缘或者区域的变化。在图像处理中,常用的梯度计算方法包括Sobel、Scharr、Laplacian等。
Sobel算子:
Sobel算子是一种常用的梯度计算方法,分为水平和垂直两个方向。在OpenCV中,cv2.Sobel() 函数用于计算图像的Sobel梯度。
基本语法如下:
sobelx = cv2.Sobel(src, ddepth, dx, dy, ksize[, dst[, scale[, delta[, borderType]]]])
src: 输入图像。ddepth: 输出图像的深度,通常使用-1表示与输入图像相同。dx和dy: 分别表示水平和垂直方向的梯度阶数。ksize: Sobel核的大小,通常为1、3、5等奇数。dst(可选): 输出图像。scale(可选): 缩放因子,通常为1。delta(可选): 一个可选的增量,将被加到输出。borderType(可选): 边界处理的方式,通常为默认值cv2.BORDER_DEFAULT。
- Laplacian算子:
Laplacian算子用于计算图像的二阶导数,从而得到图像的梯度。在OpenCV中,cv2.Laplacian() 函数用于计算Laplacian梯度。
基本语法如下:
laplacian = cv2.Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
参数说明与Sobel类似,其中 ksize 表示Laplacian核的大小。
import cv2
import numpy as np
# 读取灰度图像
img = cv2.imread(r"C:\Users\mzd\Desktop\opencv\images.jpg", cv2.IMREAD_GRAYSCALE)
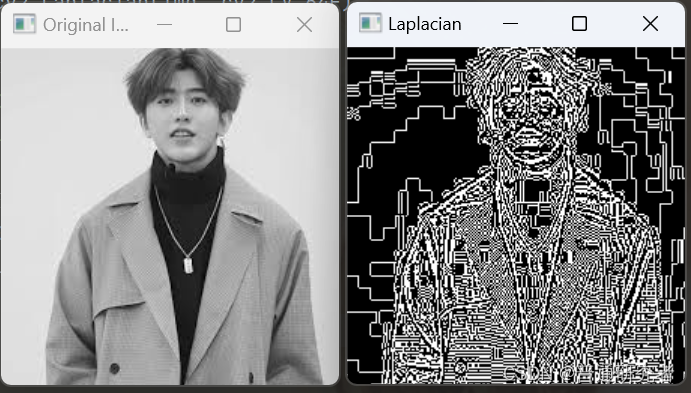
# 计算Laplacian梯度
laplacian = cv2.Laplacian(img, cv2.CV_64F)# 显示原始图像和Laplacian梯度图像
cv2.imshow('Original Image', img)
cv2.imshow('Laplacian', laplacian)# 等待用户按下任意键
cv2.waitKey(0)
cv2.destroyAllWindows()
这些梯度计算方法可以帮助检测图像中的边缘和区域变化,对于后续的图像分析和处理非常有用。