1. ADC介绍
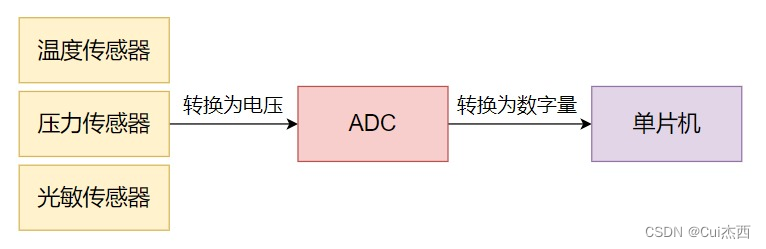
ADC是什么?
- Analog-to-Digital Converter,指模拟/数字转换器
ADC的性能指标
- 量程:能测量的电压范围
- 分辨率:ADC能辨别的最小模拟量,通常以输出二进制数的位数表示,比如:8、10、12、16 位等;位数越多,分辨率越高,一般来说分辨率越高,转化时间越长
- 转换时间:从转换开始到获得稳定的数字量输出所需要的时间称为转换时间
ADC特性
- 12 位精度下转换速度可高达 1MHZ
- 供电电压:V SSA :0V,V DDA :2.4V~3.6V
- ADC 输入范围:VREF- ≤ VIN ≤ VREF+(0–3.6V)
- 采样时间可配置,采样时间越长,转换结果相对越准确,但是转换速度就越慢
- ADC 的结果可以左对齐或右对齐方式存储在 16 位数据寄存器中
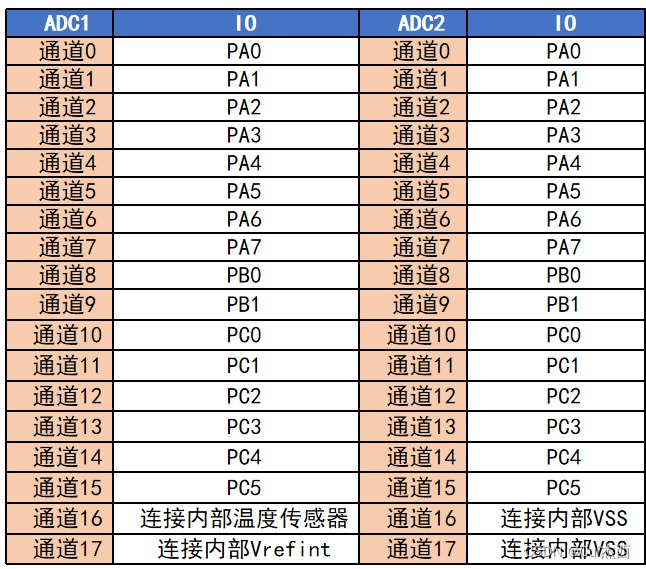
ADC通道
- 总共 2 个 ADC(ADC1,ADC2),每个 ADC 有 18 个转换通道: 16 个外部通道、 2 个内部通道(温度传感器、内
部参考电压)。
- 外部的 16 个通道在转换时又分为规则通道和注入通道,其中规则通道最多有 16 路,注入通道最多有 4 路。
- 规则组:正常排队的人;
- 注入组:有特权的人(军人、孕妇)
ADC转换顺序
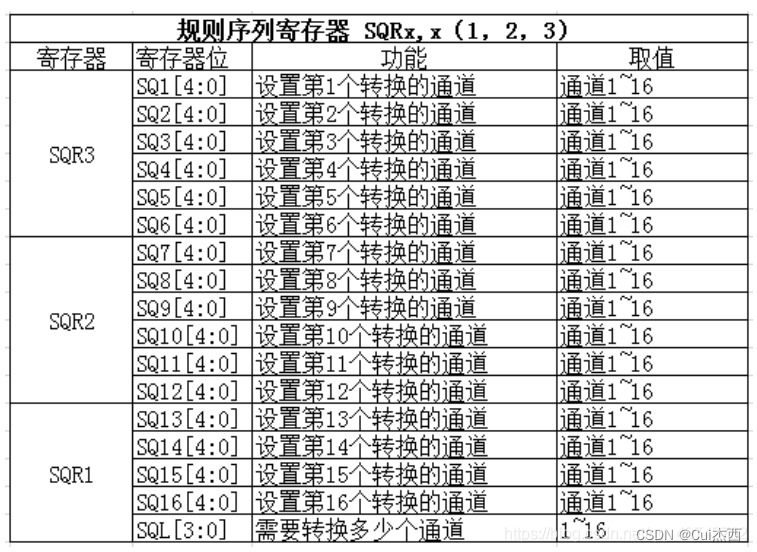
- 每个 ADC 只有一个数据寄存器,16 个通道一起共用这个寄存器,所以需要指定规则转换通道的转换顺序。
- 规则通道中的转换顺序由三个寄存器控制:SQR1、SQR2、SQR3,它们都是 32 位寄存器。
- SQR 寄存器控制着转换通道的数目和转换顺序,只要在对应的寄存器位 SQx 中写入相应的通道,这个通道就是第 x 个转换。
- 和规则通道转换顺序的控制一样,注入通道的转换也是通过注入寄存器来控制,只不过只有一个 JSQR 寄存器
来控制,控制关系如下:
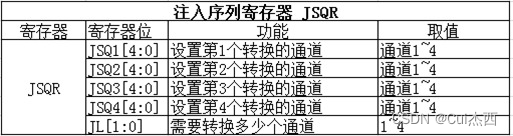
- 注入序列的转换顺序是从JSQx[ 4 : 0 ](x=4-JL[1:0])开始。只有当JL=4的时候,注入通道的转换顺序才会按
照JSQ1、JSQ2、JSQ3、JSQ4的顺序执行。
ADC触发方式
- 通过向控制寄存器ADC-CR2的ADON位写1来开启转换,写0停止转换。
- 也可以通过外部事件(如定时器)进行转换。
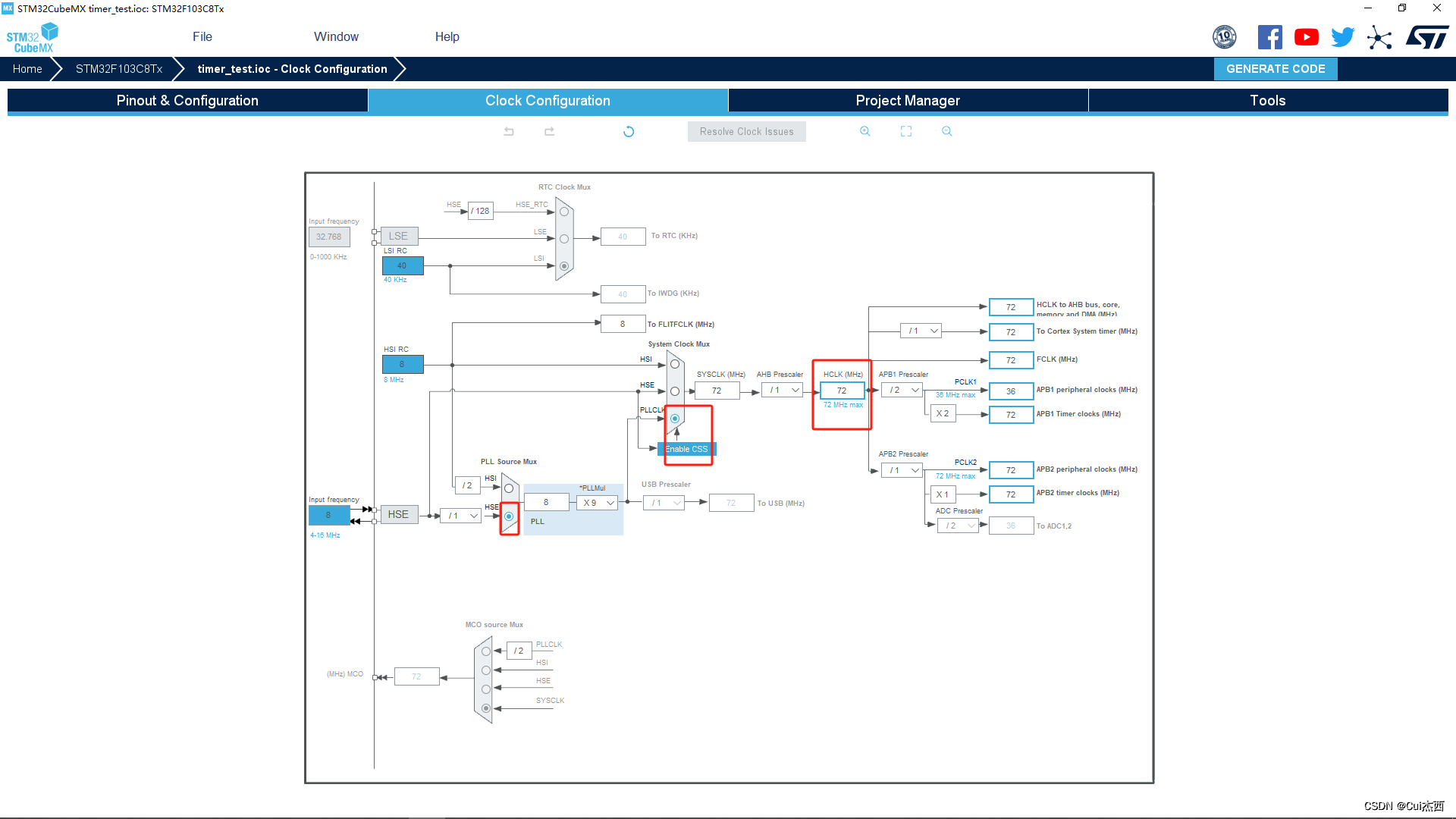
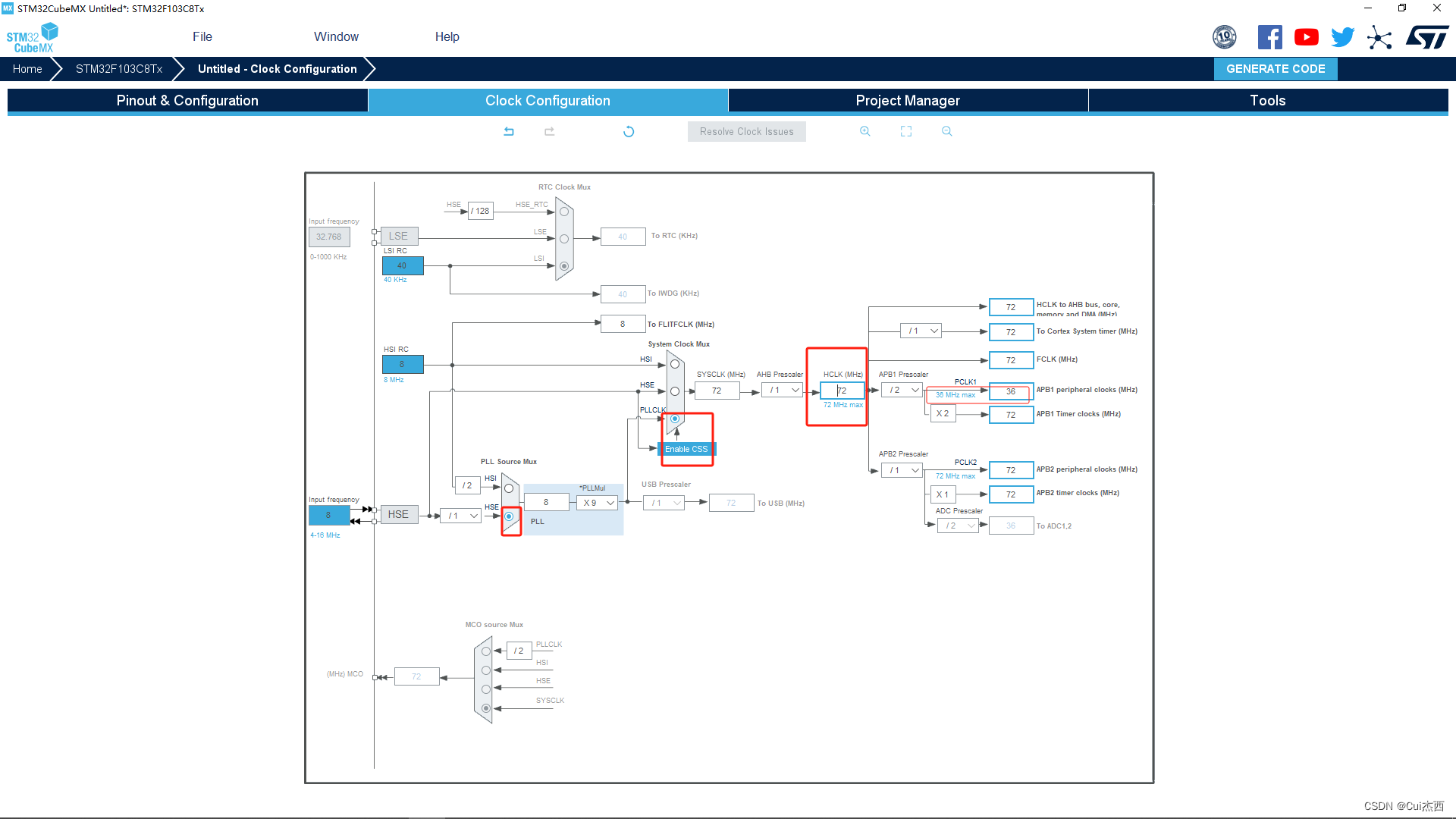
ADC转化时间
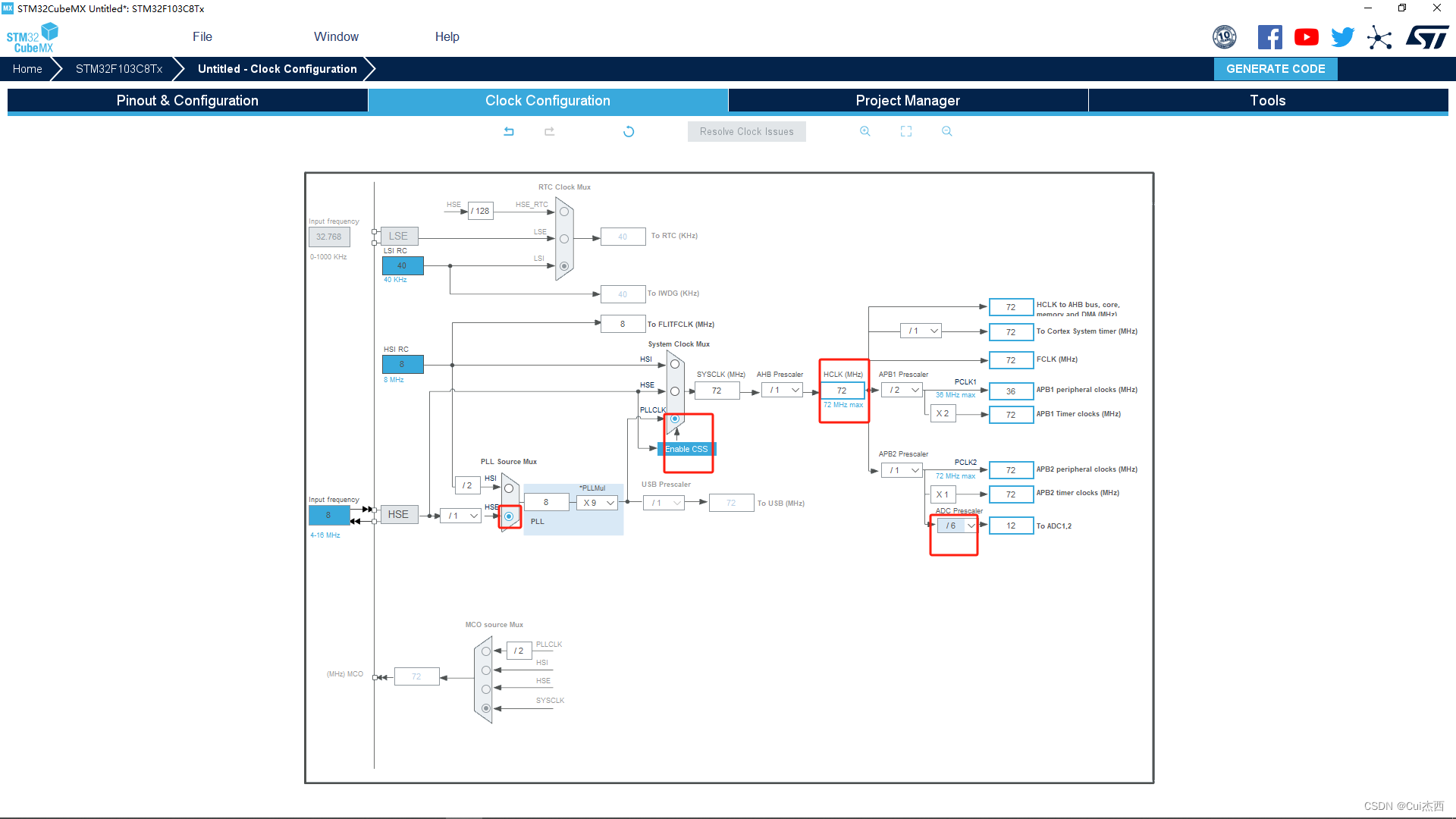
- ADC 是挂载在 APB2 总线(PCLK2)上的,经过分频器得到 ADC 时钟(ADCCLK),最高 14 MHz。
- 转换时间=采样时间+12.5个周期
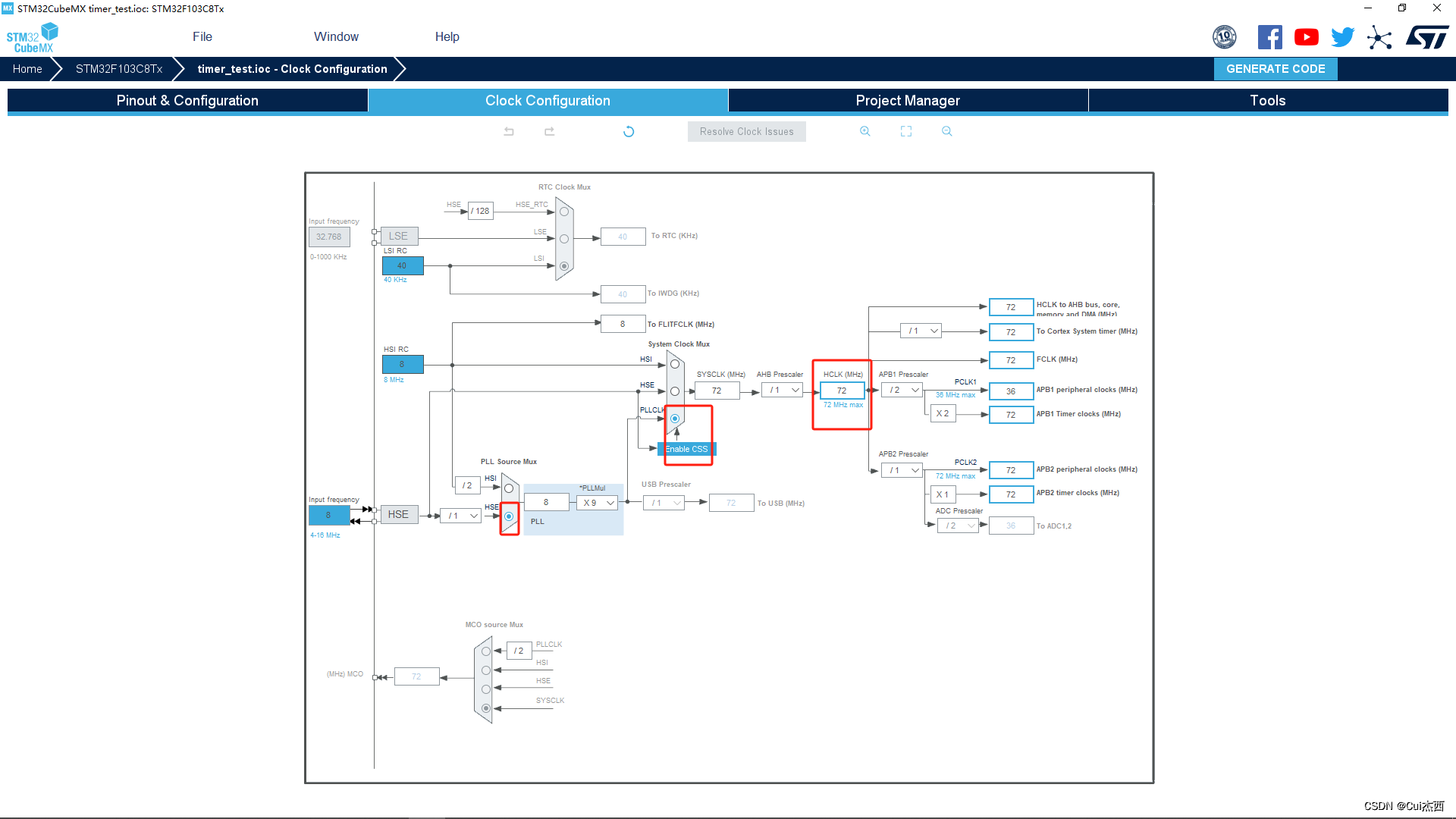
- 12.5 个周期是固定的,一般我们设置 PCLK2=72M,经过 ADC 预分频器能分频到最大的时钟只能是 12M,
采样周期设置为 1.5 个周期,算出最短的转换时间为 1.17us。
ADC转化模式
扫描模式
- 关闭扫描模式:只转换 ADC_SQRx 或 ADC_JSQR 选中的第一个通道
- 打开扫描模式:扫描所有被 ADC_SQRx 或 ADC_JSQR 选中的所有通道
单次转换/连续转换
- 单次转换:只转换一次
- 连续转换:转换一次之后,立马进行下一次转换
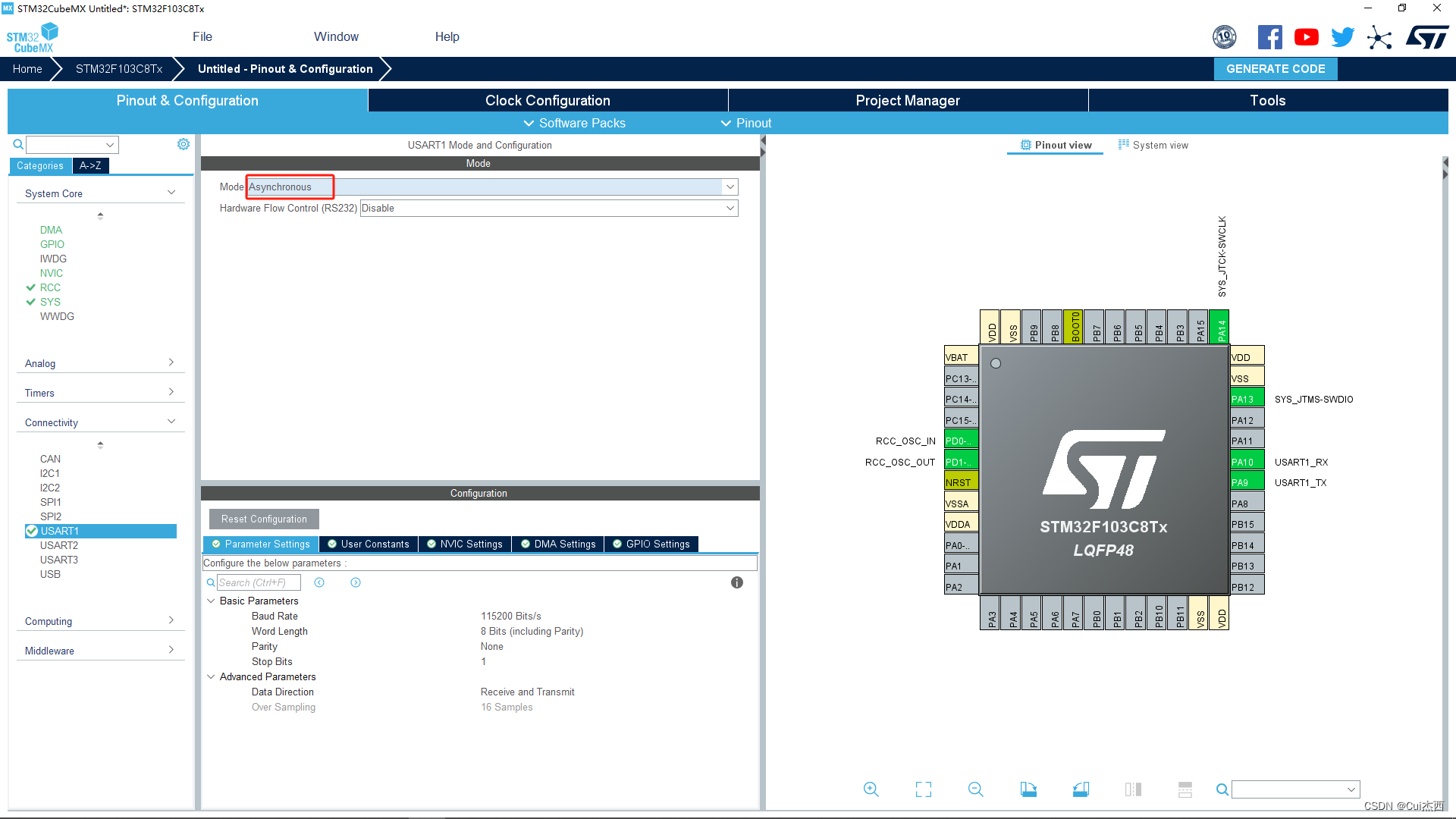
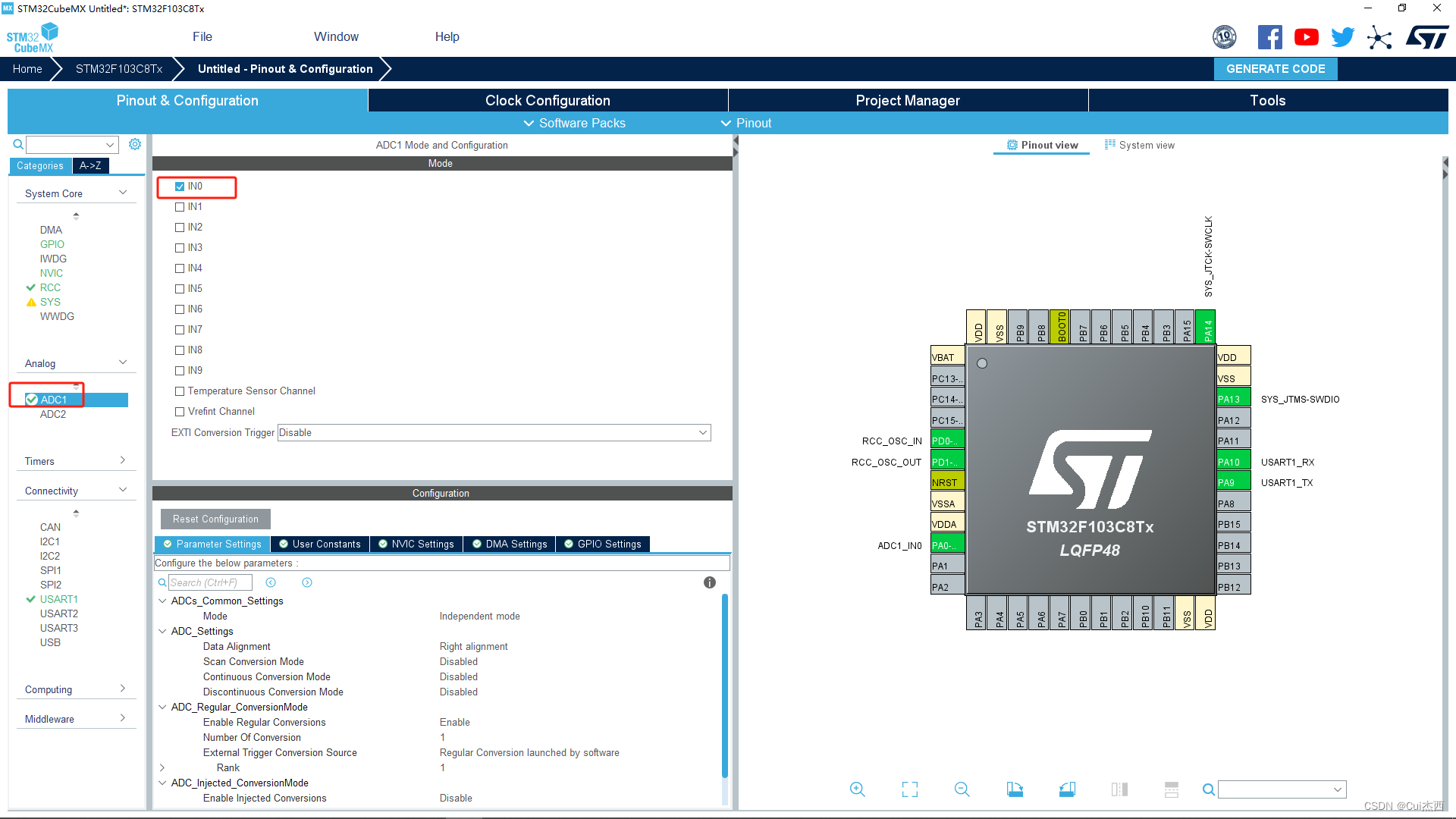
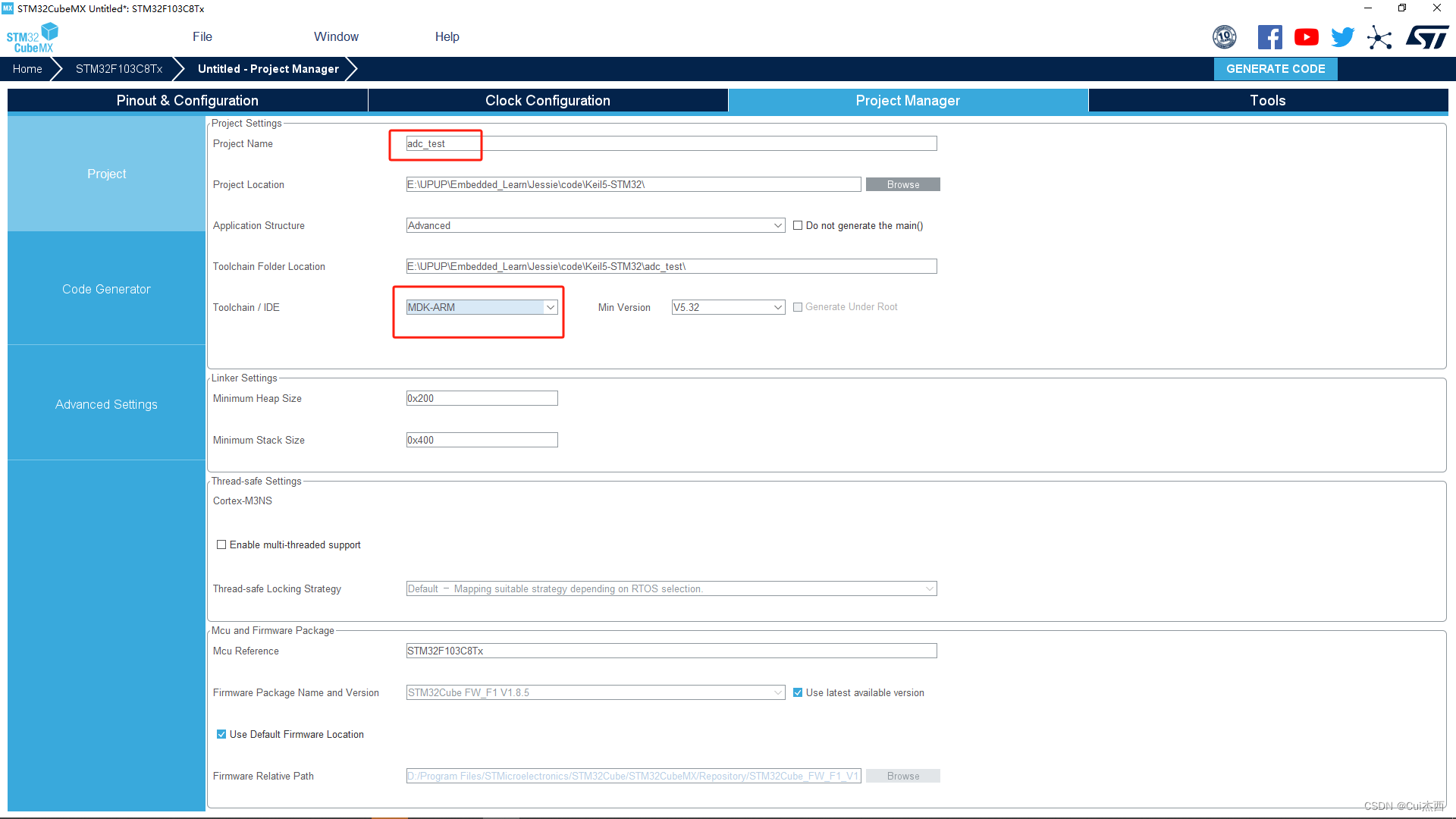
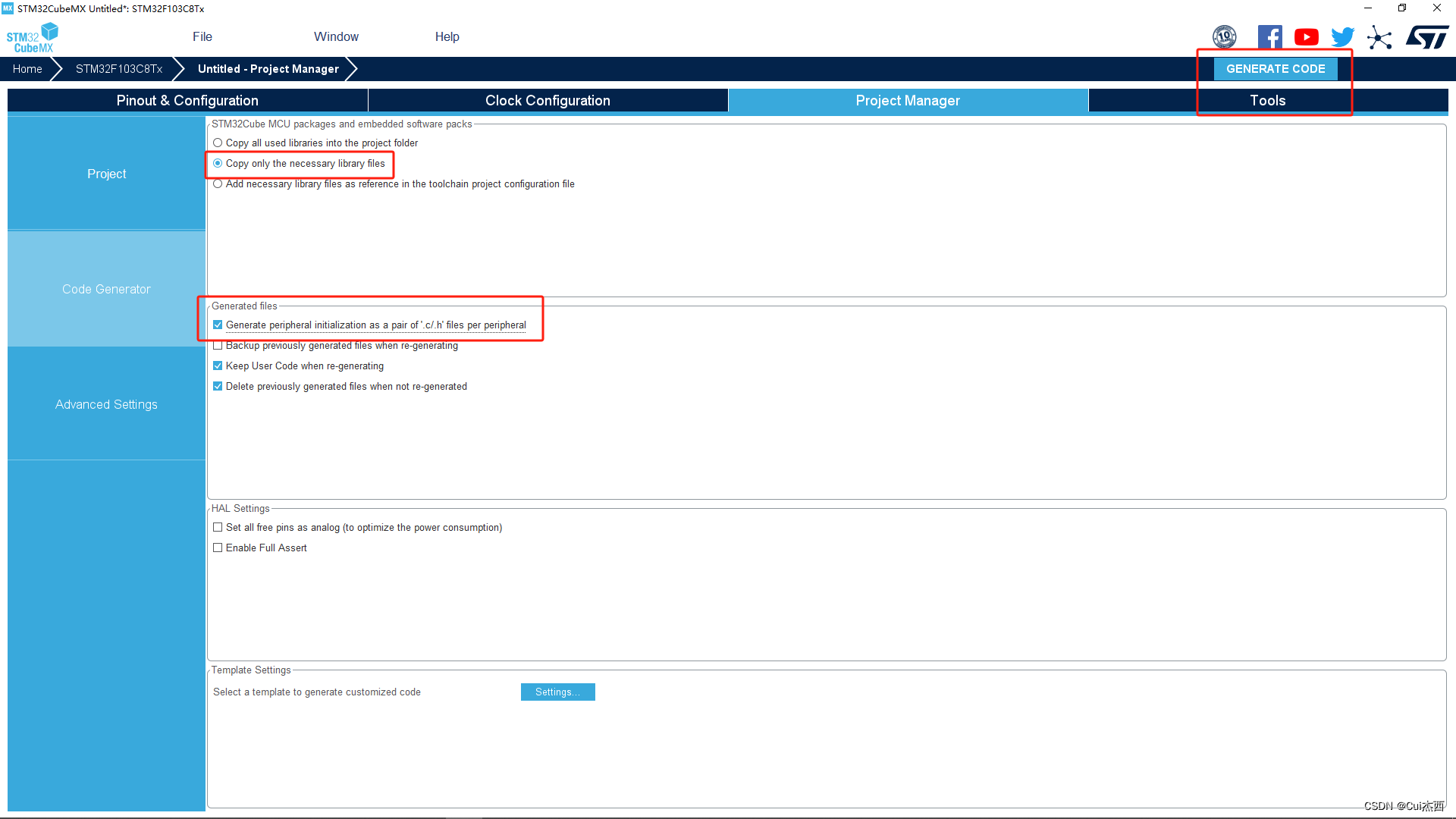
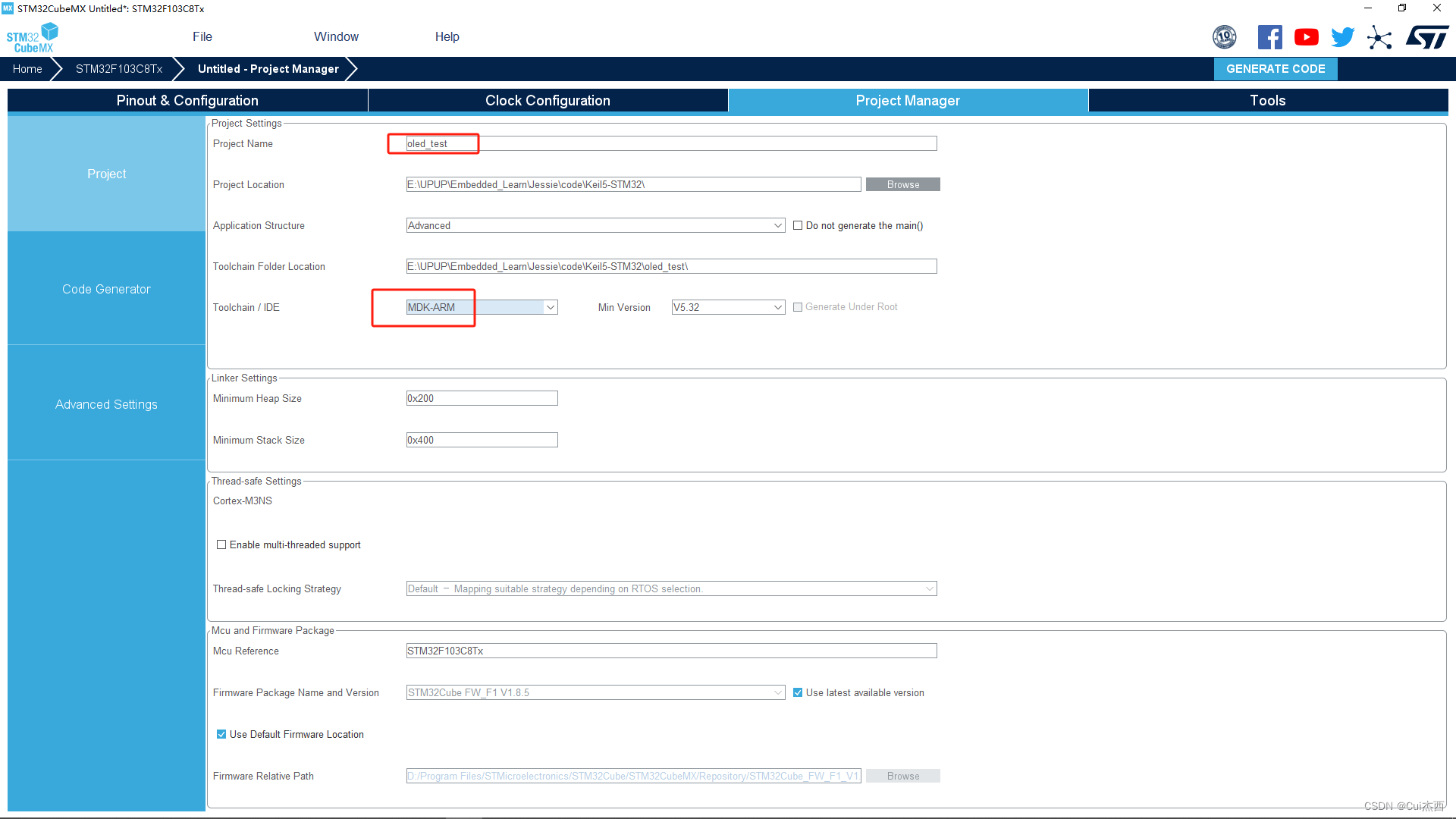
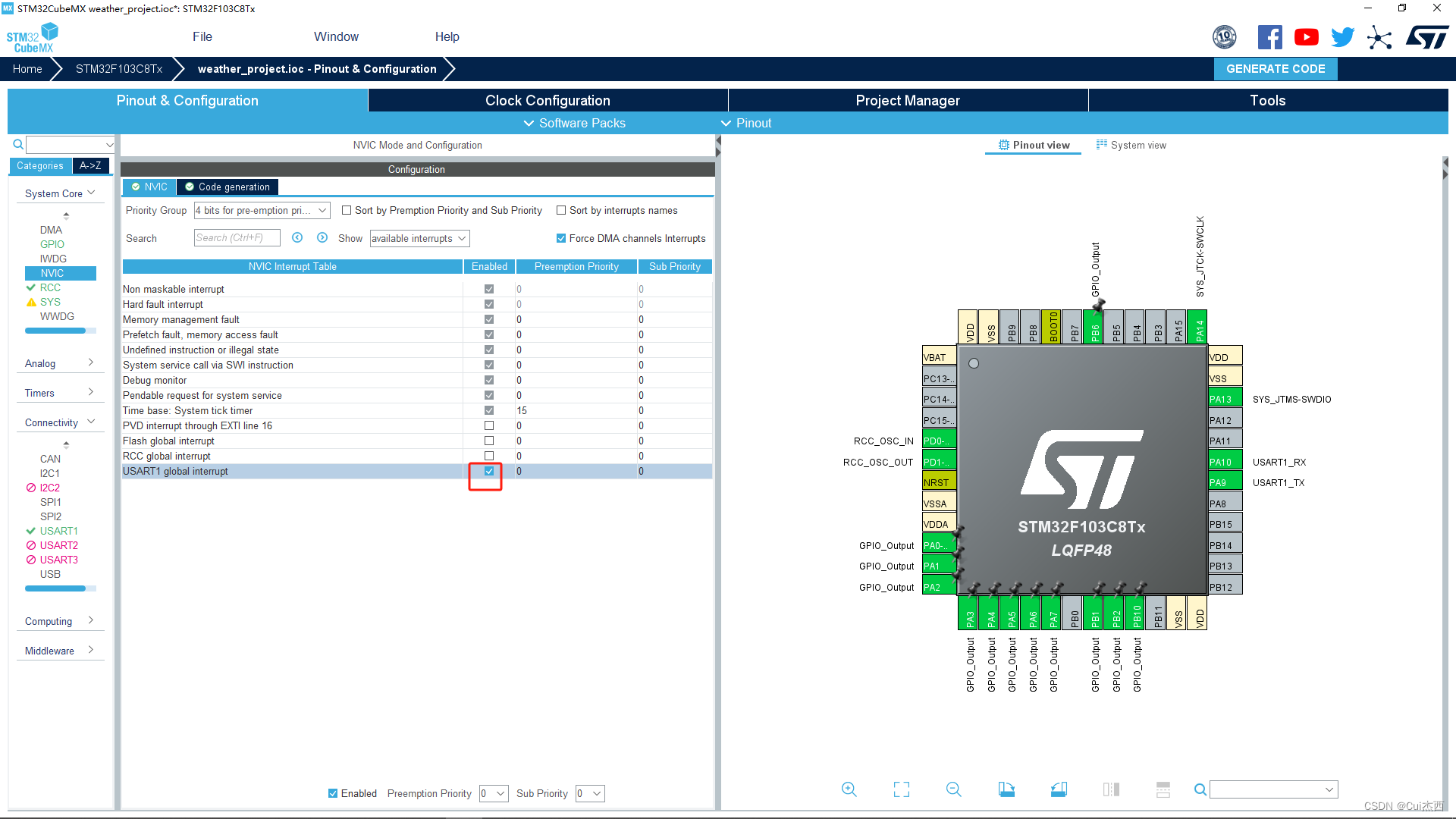
2. 使用ADC读取烟雾传感器的值(351.55)
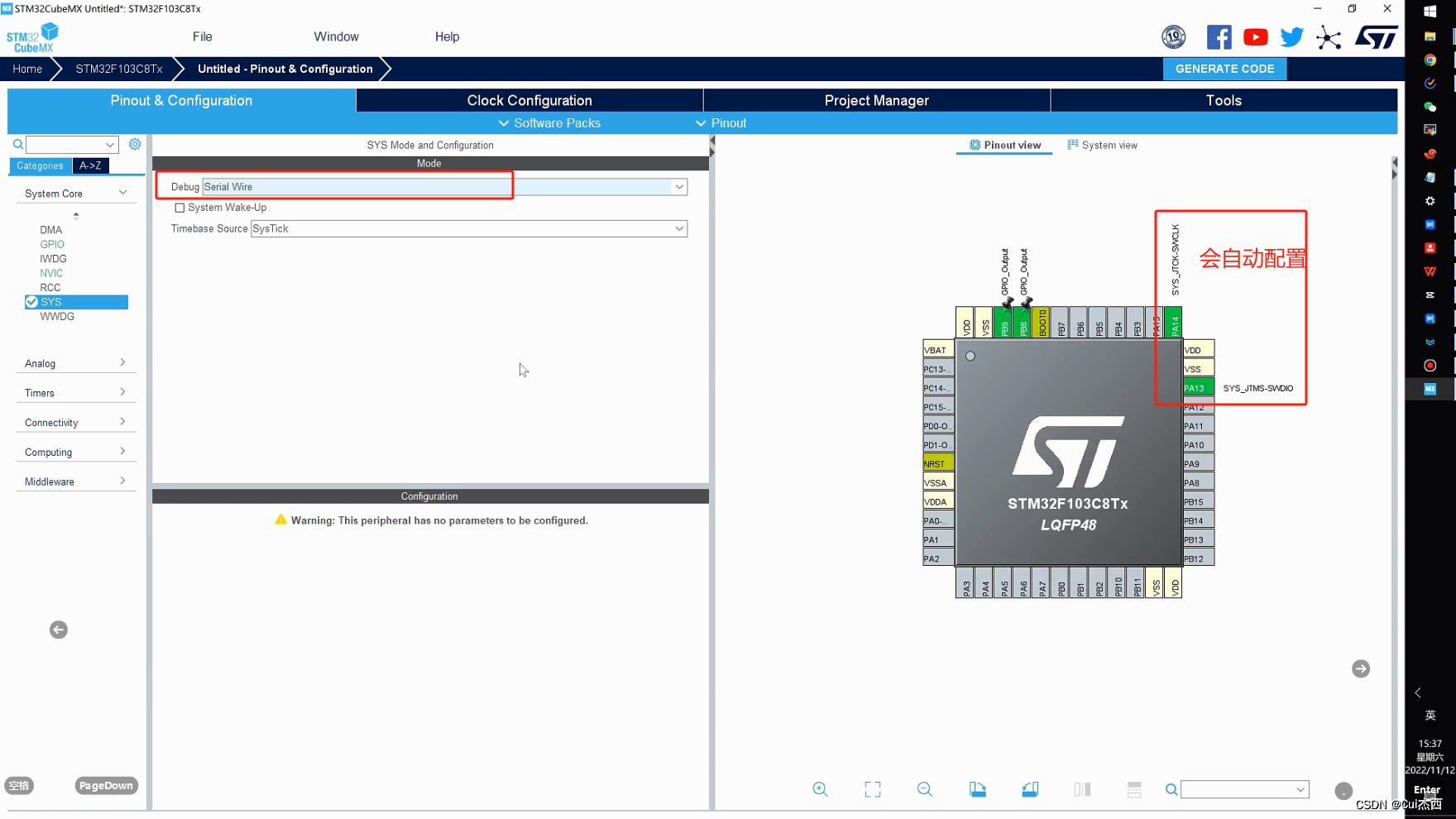
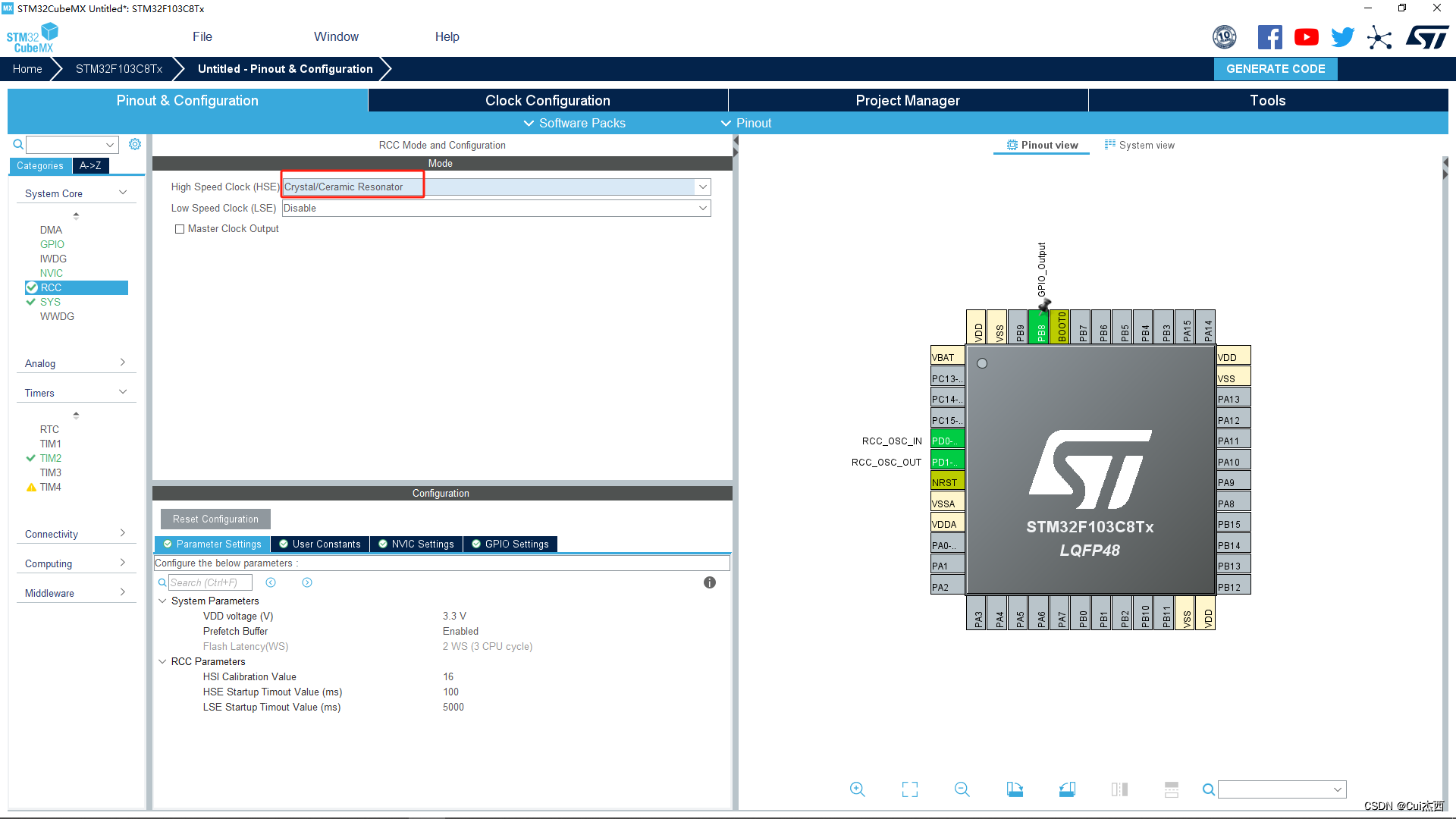
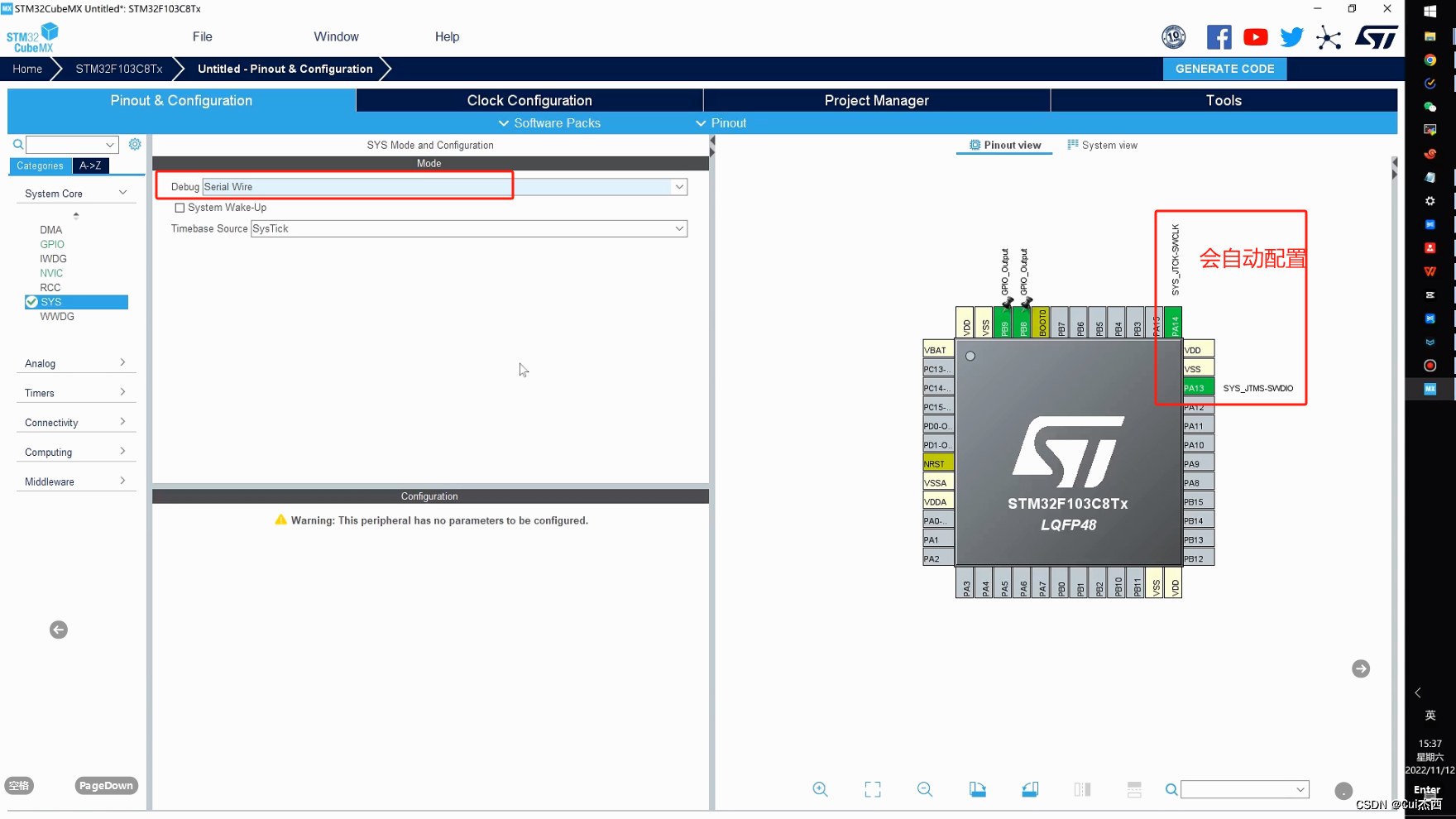
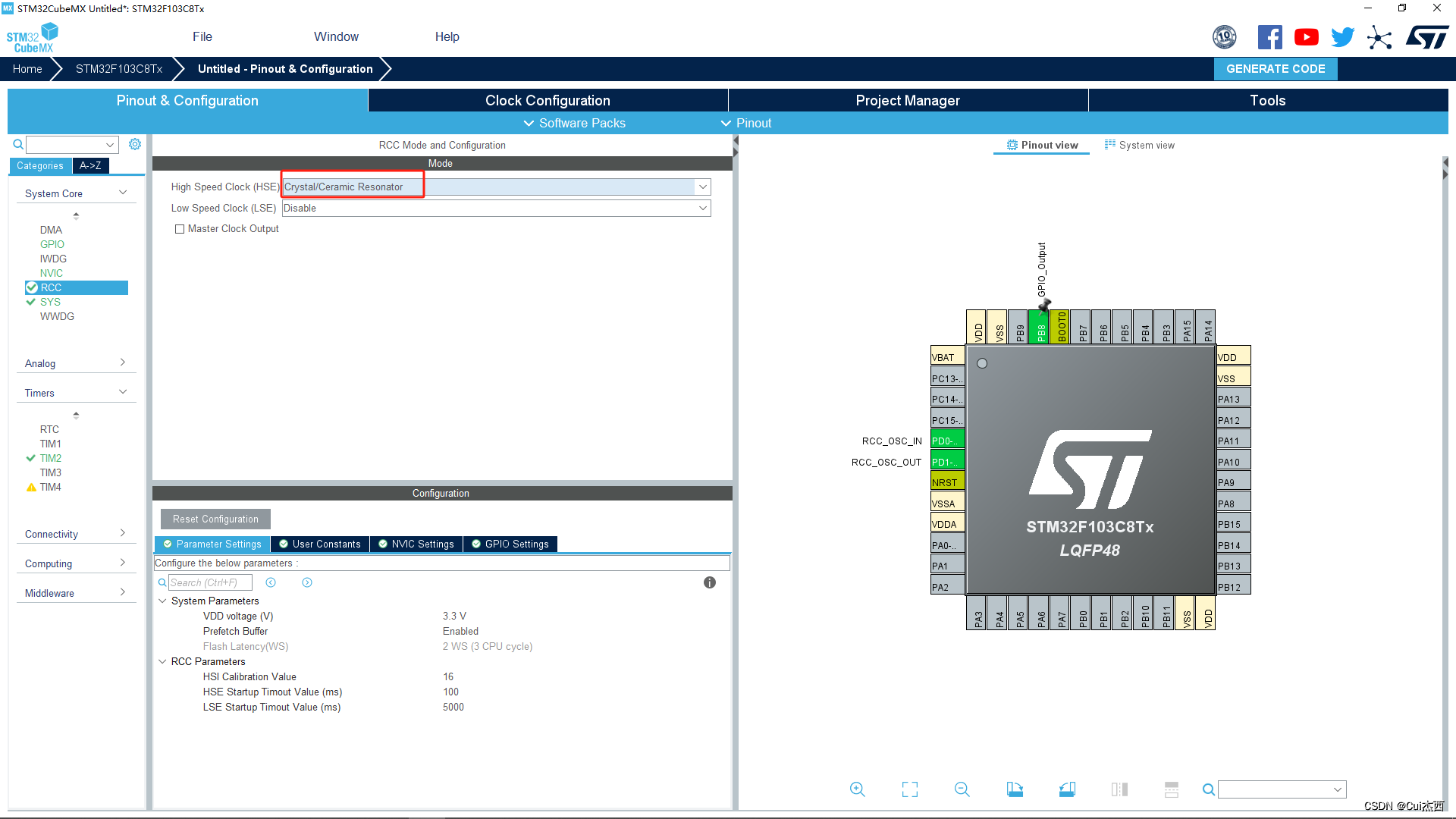
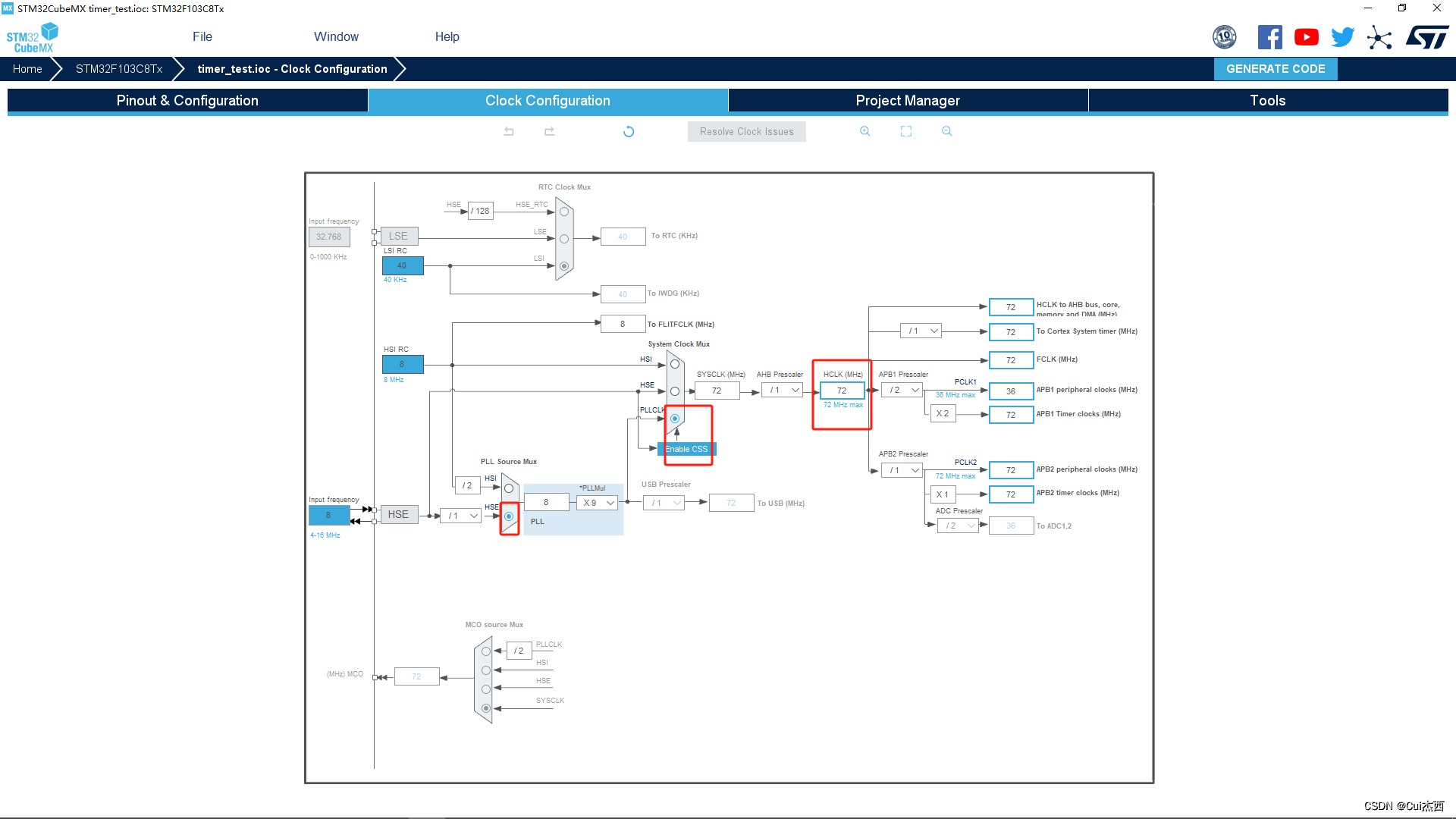
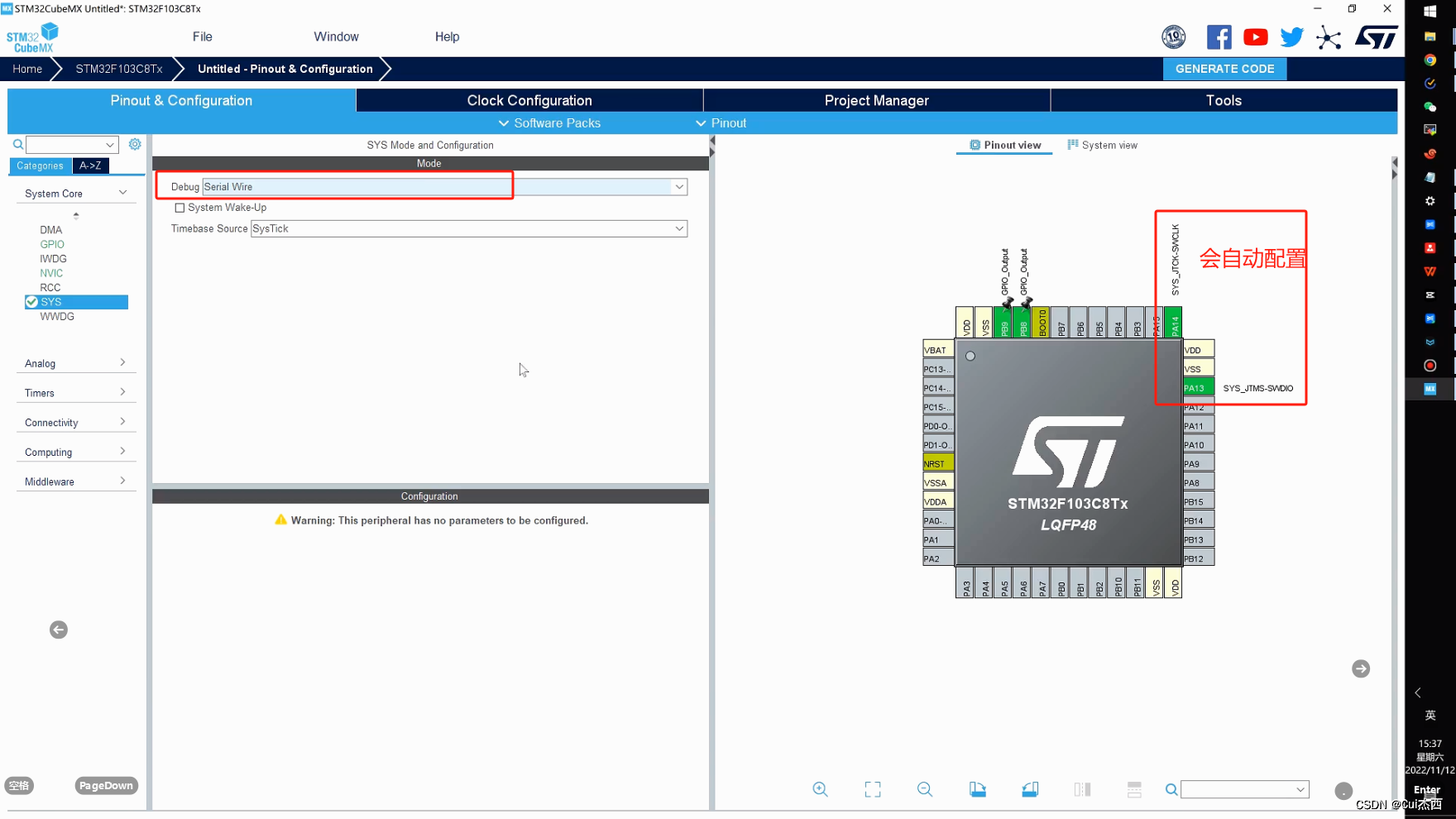
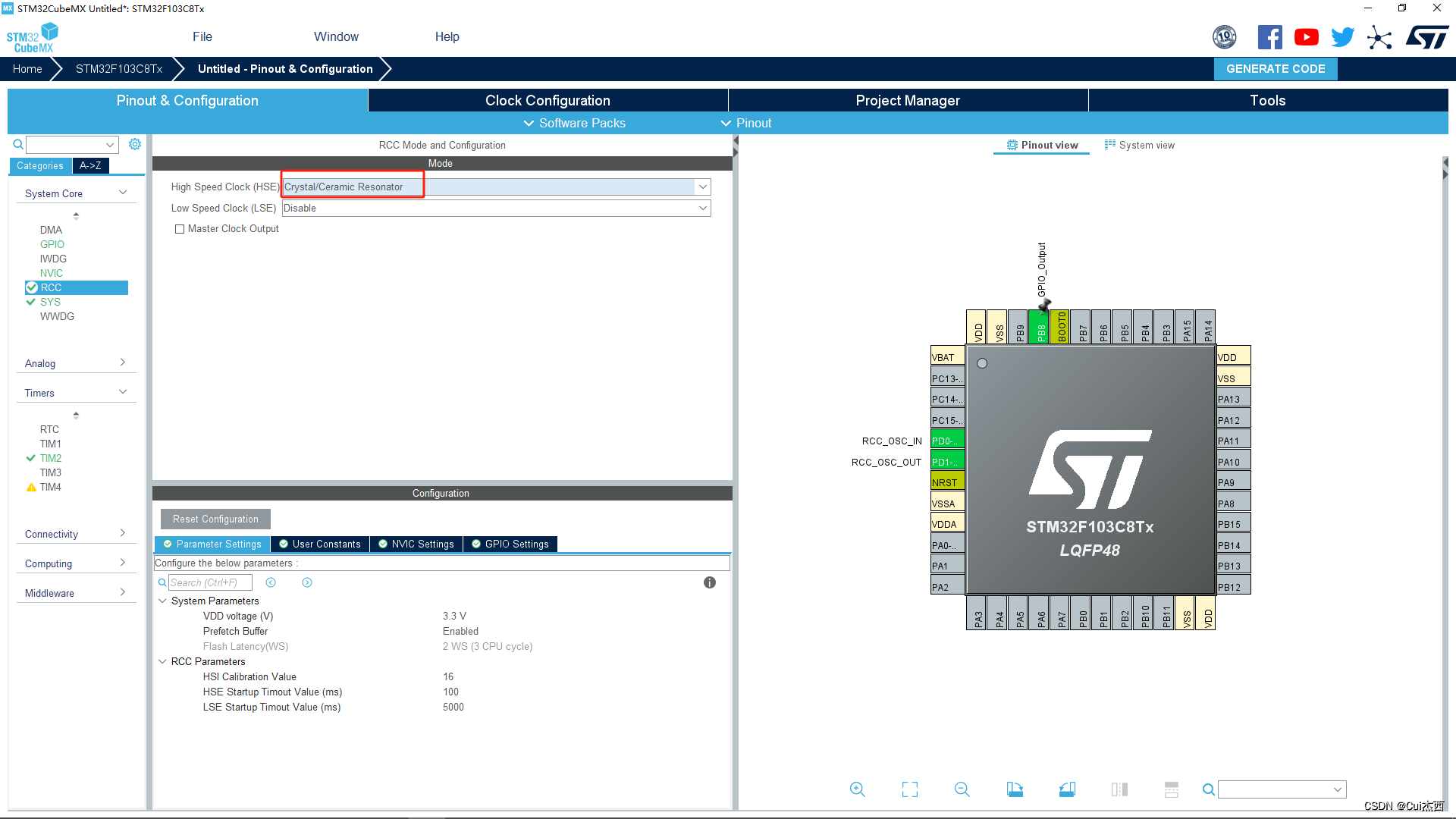
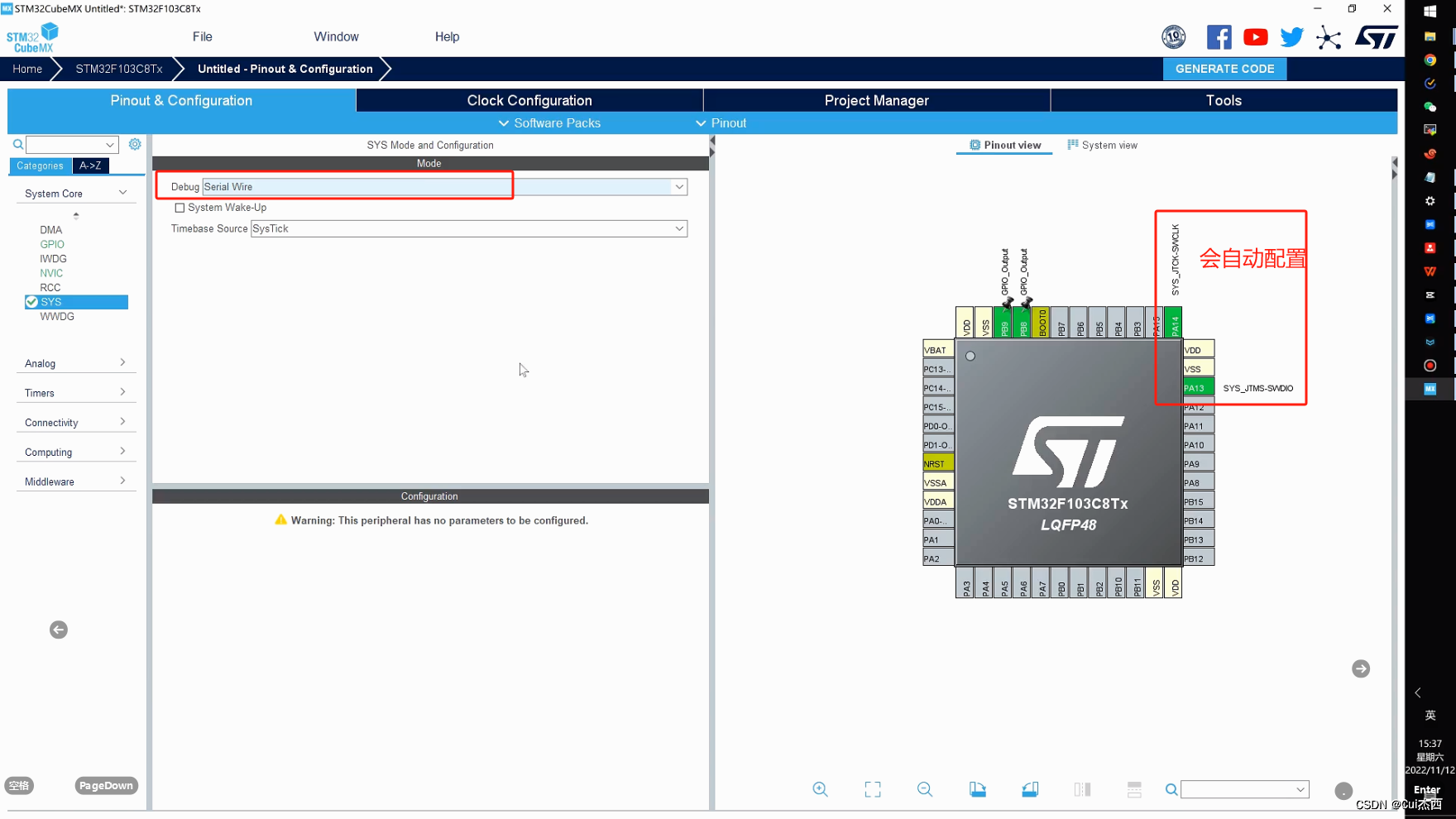
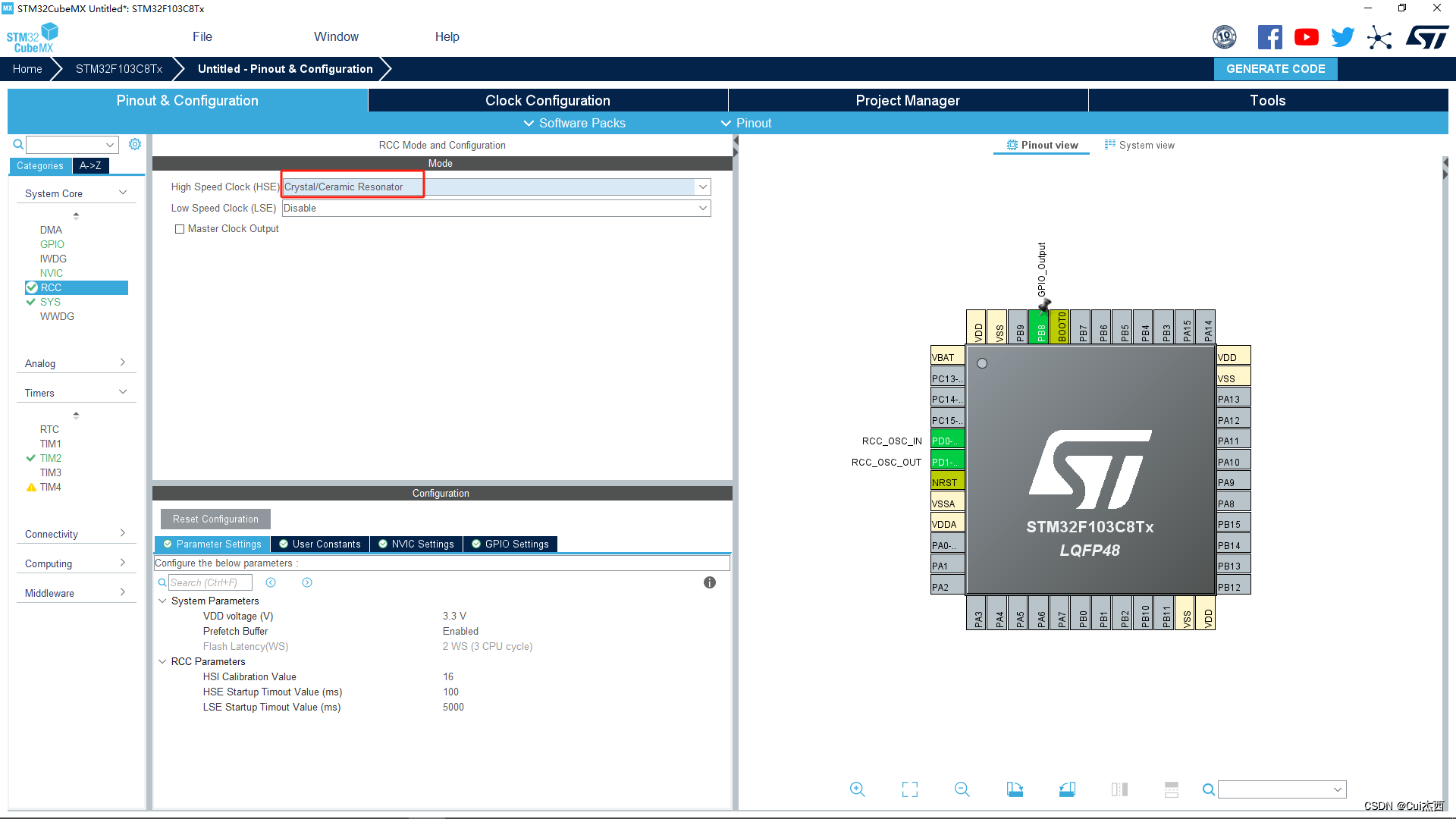
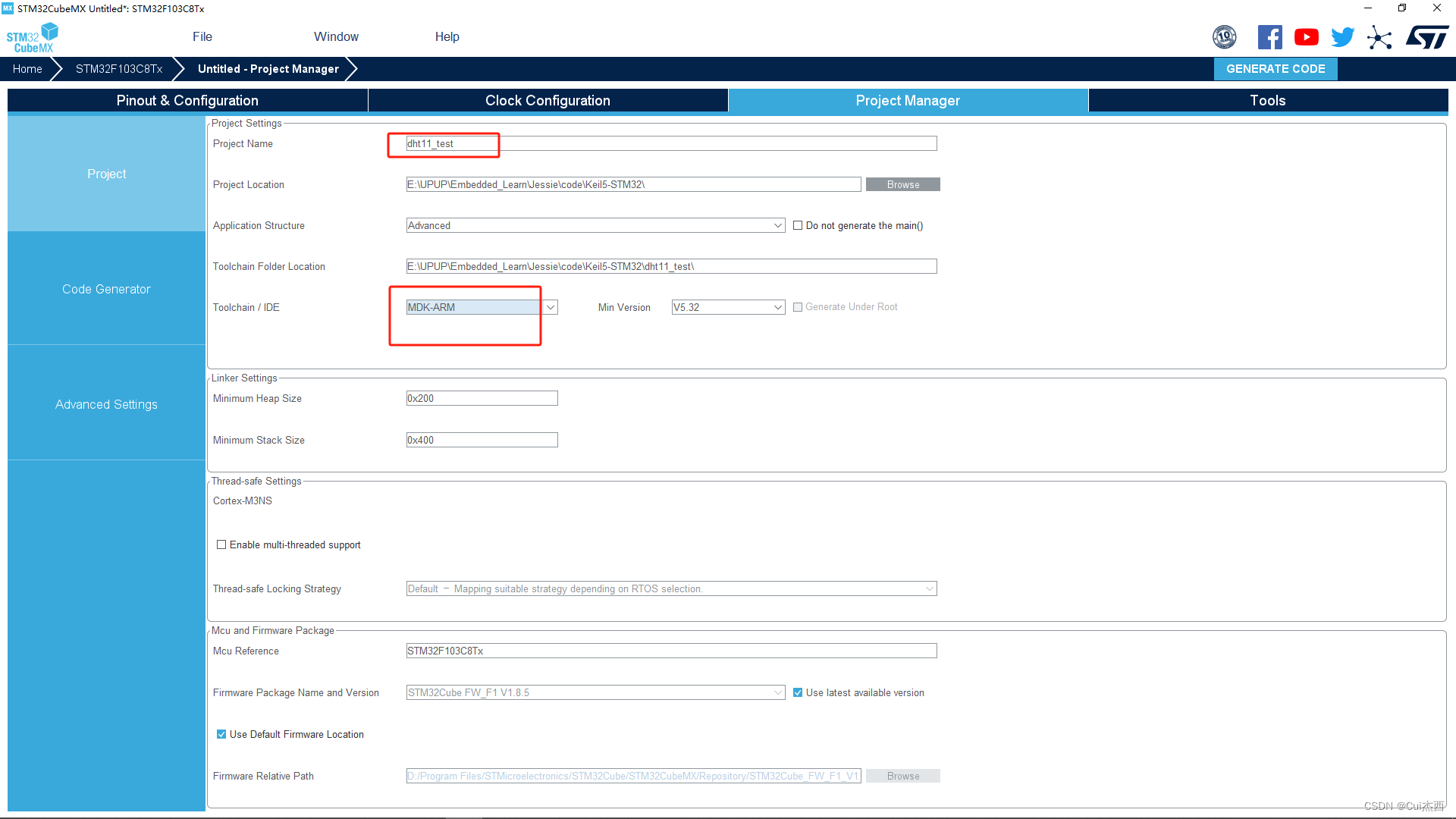
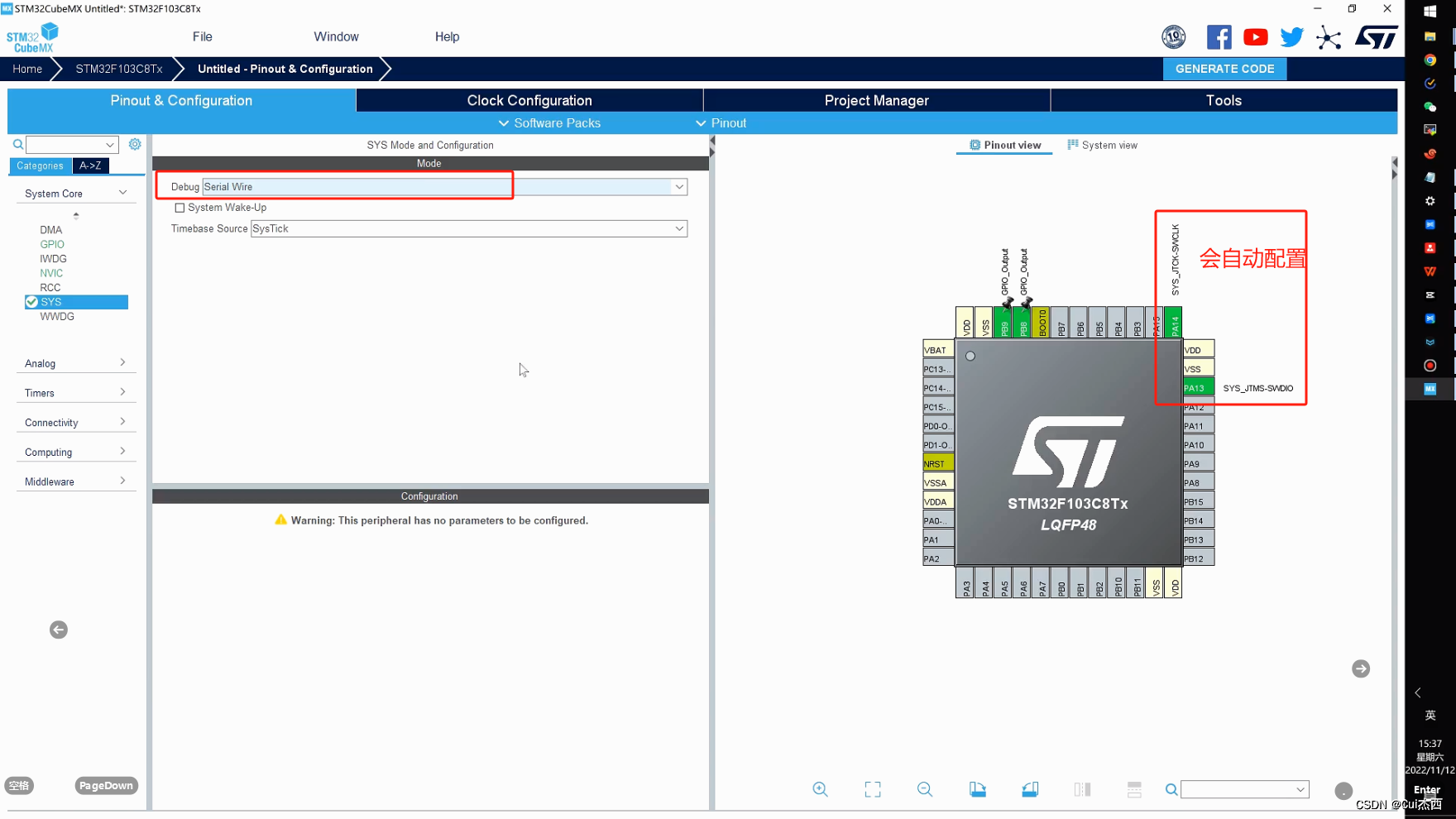
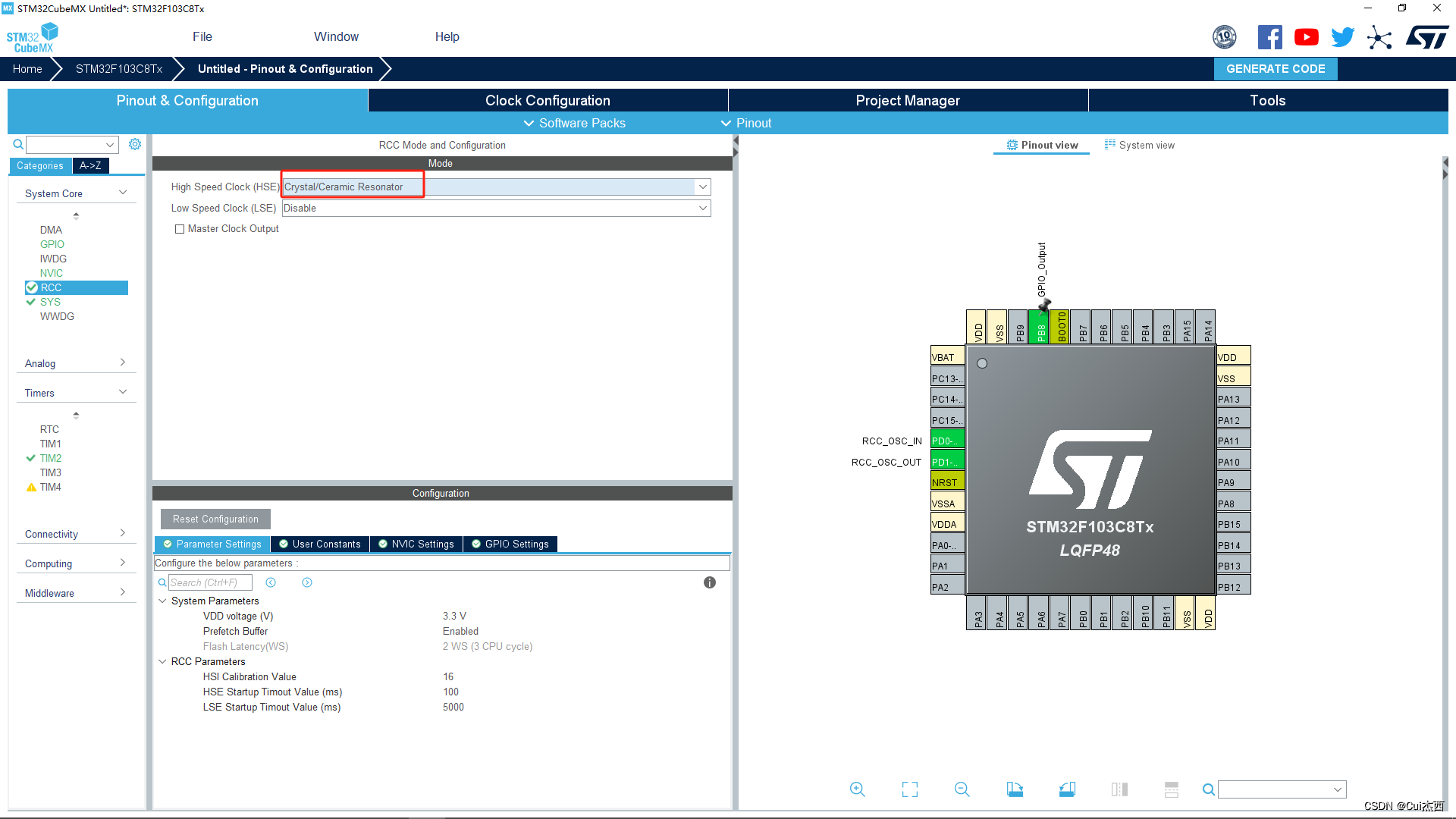
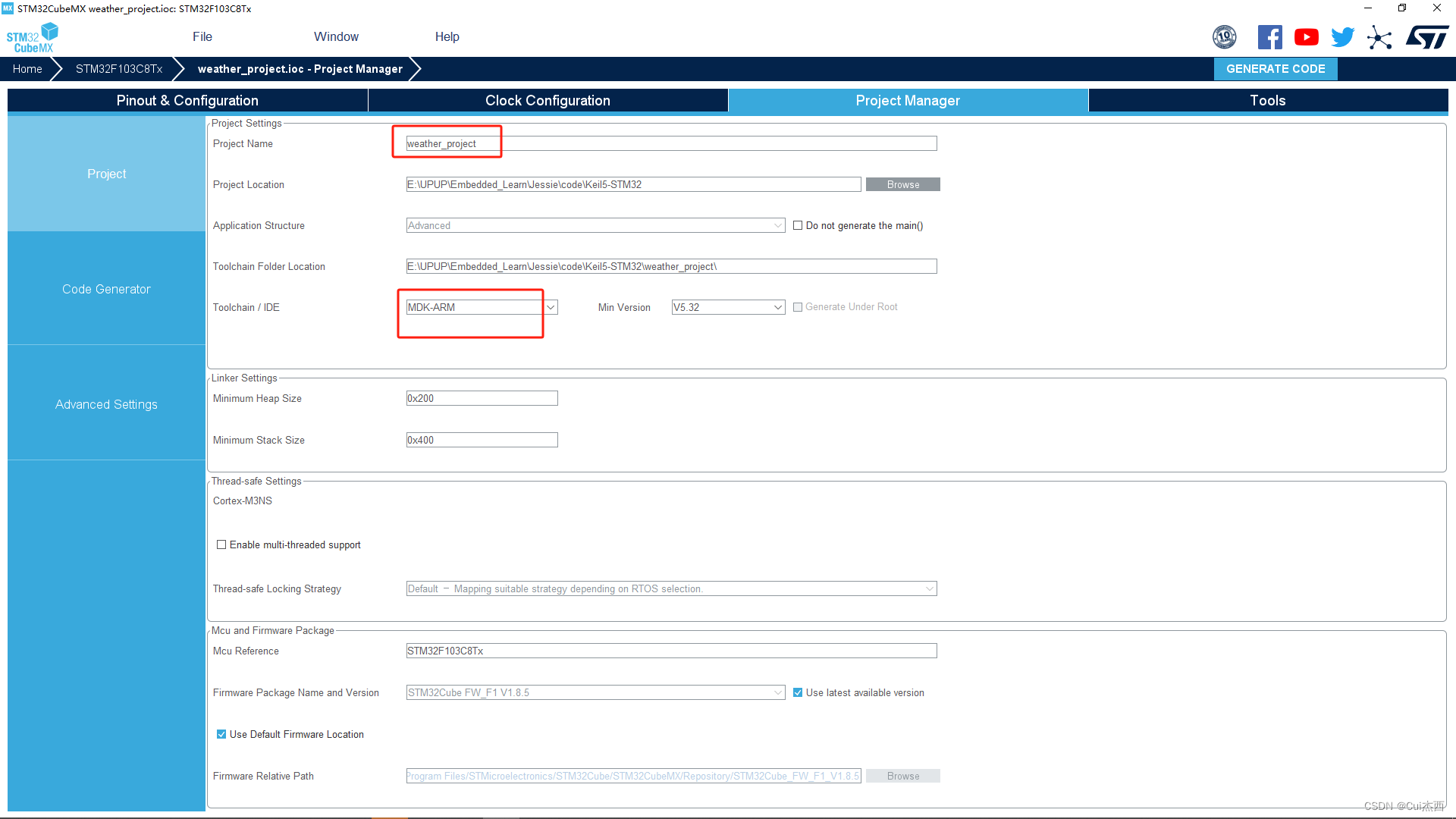
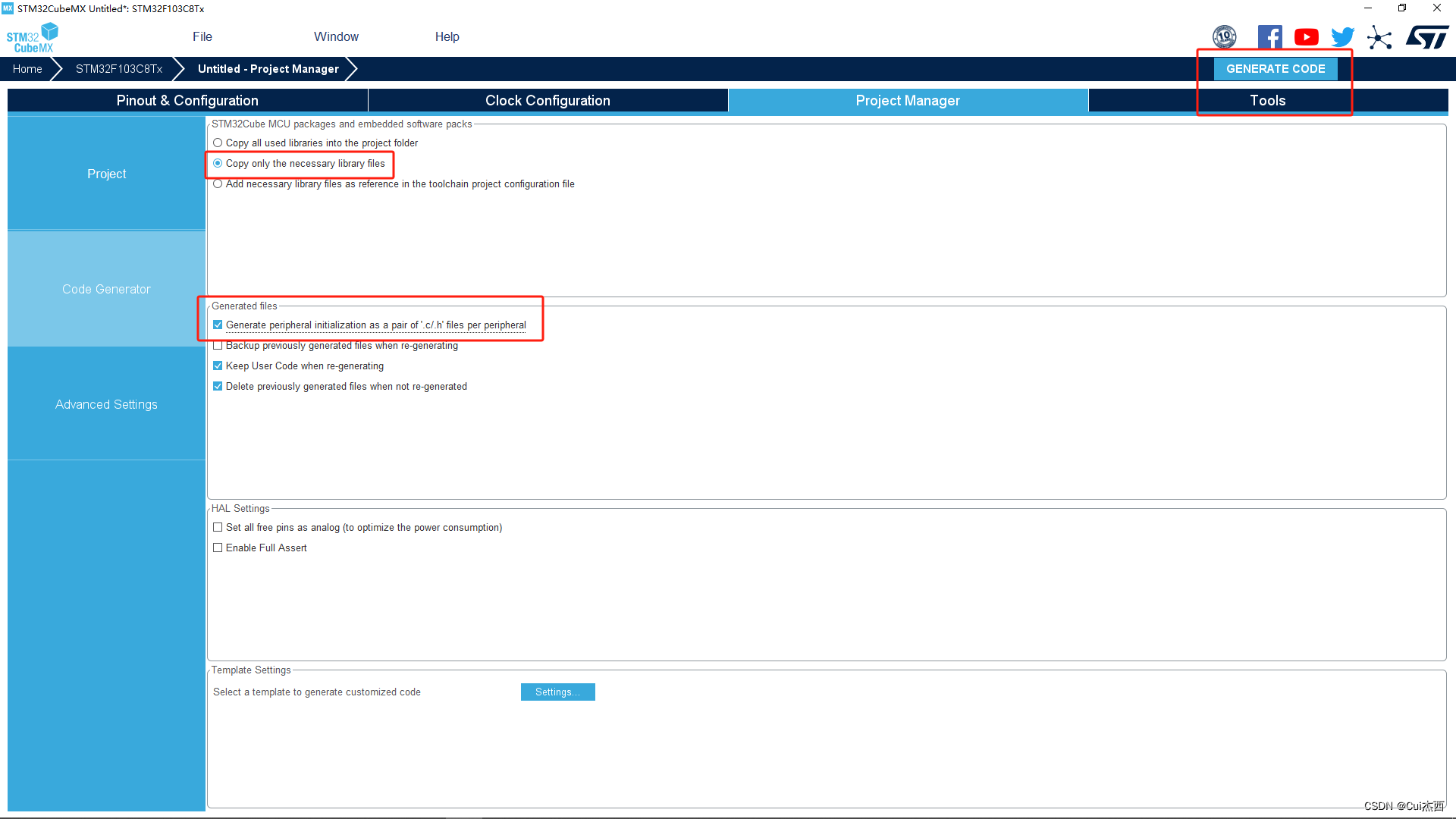
- STM32CubeMx工程配置
- 代码(21.adc_test/MDK-ARM)
uint32_t smoke_value = 0;
while (1)
{HAL_ADC_Start(&hadc1); //启动ADC单次转换HAL_ADC_PollForConversion(&hadc1, 50); //等待ADC转换完成smoke_value = HAL_ADC_GetValue(&hadc1); //读取ADC转换数据printf("smoke_value = %f\r\n", 3.3/4096 * smoke_value);//电压值//printf("smoke_value = %d \r\n", smoke_value);//多少个刻度HAL_Delay(500);
}

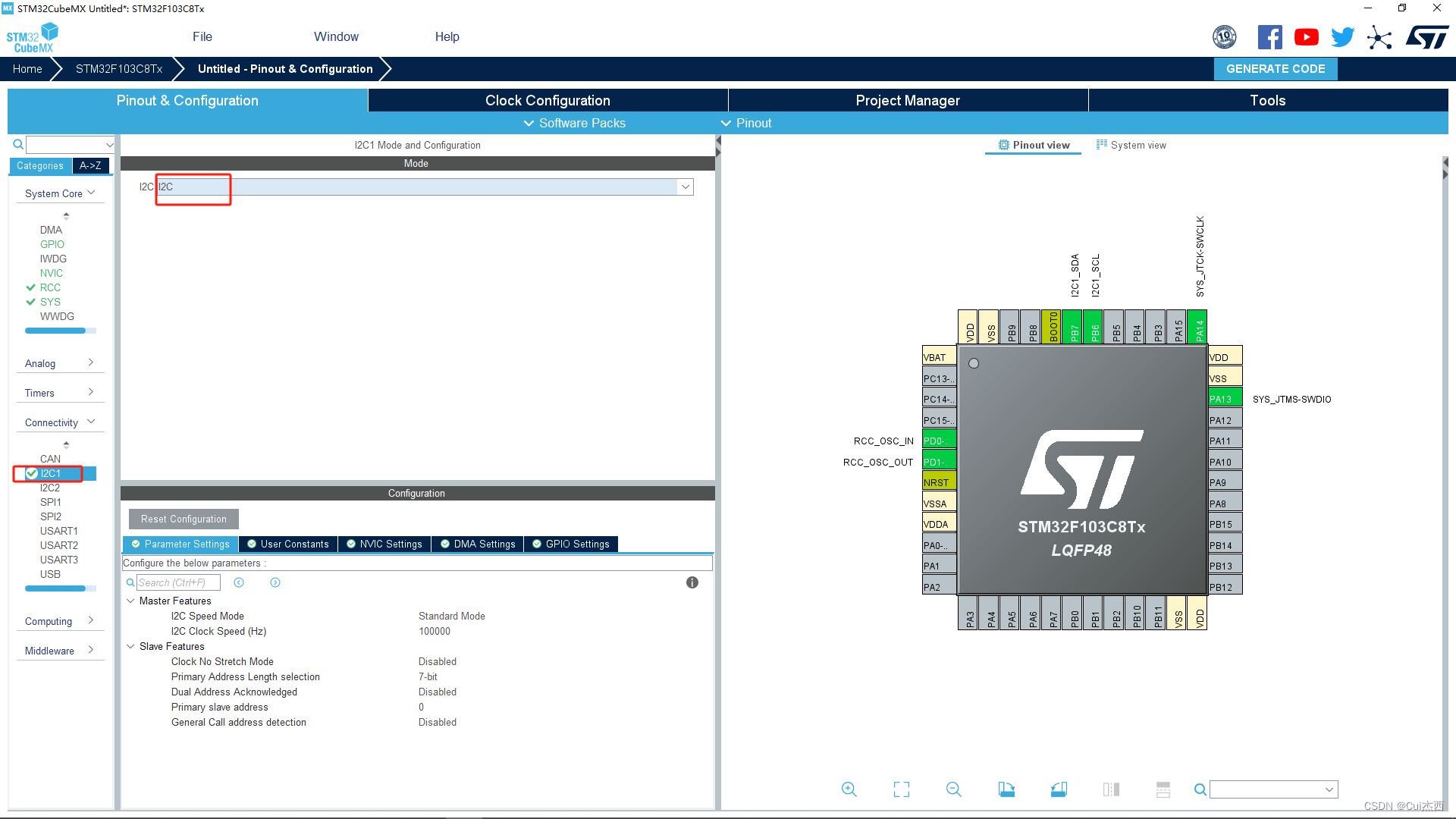
3. llC介绍及OLED写数据函数封装(352.56)
- 笔记参照:上官一号笔记第5章节;
- 视频参照:上官一号92~103节
函数封装
- 用到的库函数:
HAL_StatusTypeDef HAL_I2C_Mem_Write(I2C_HandleTypeDef *hi2c,uint16_t DevAddress,uint16_t MemAddress,uint16_t MemAddSize,uint8_t *pData,uint16_t Size,uint32_t Timeout)
参数一:I2C_HandleTypeDef *hi2c,I2C设备句柄
参数二:uint16_t DevAddress,目标器件的地址,七位地址必须左对齐
参数三:uint16_t MemAddress,目标器件的目标寄存器地址
参数四:uint16_t MemAddSize,目标器件内部寄存器地址数据长度
参数五:uint8_t *pData,待写的数据首地址
参数六:uint16_t Size,待写的数据长度
参数七:uint32_t Timeout,超时时间
返回值:HAL_StatusTypeDef,HAL状态(OK,busy,ERROR,TIMEOUT)
- 向OLED写命令的封装:
void Oled_Write_Cmd(uint8_t dataCmd)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT,&dataCmd, 1, 0xff);
}
- 向OLED写数据的封装:
void Oled_Write_Data(uint8_t dataData)
{HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT,&dataData, 1, 0xff);
}
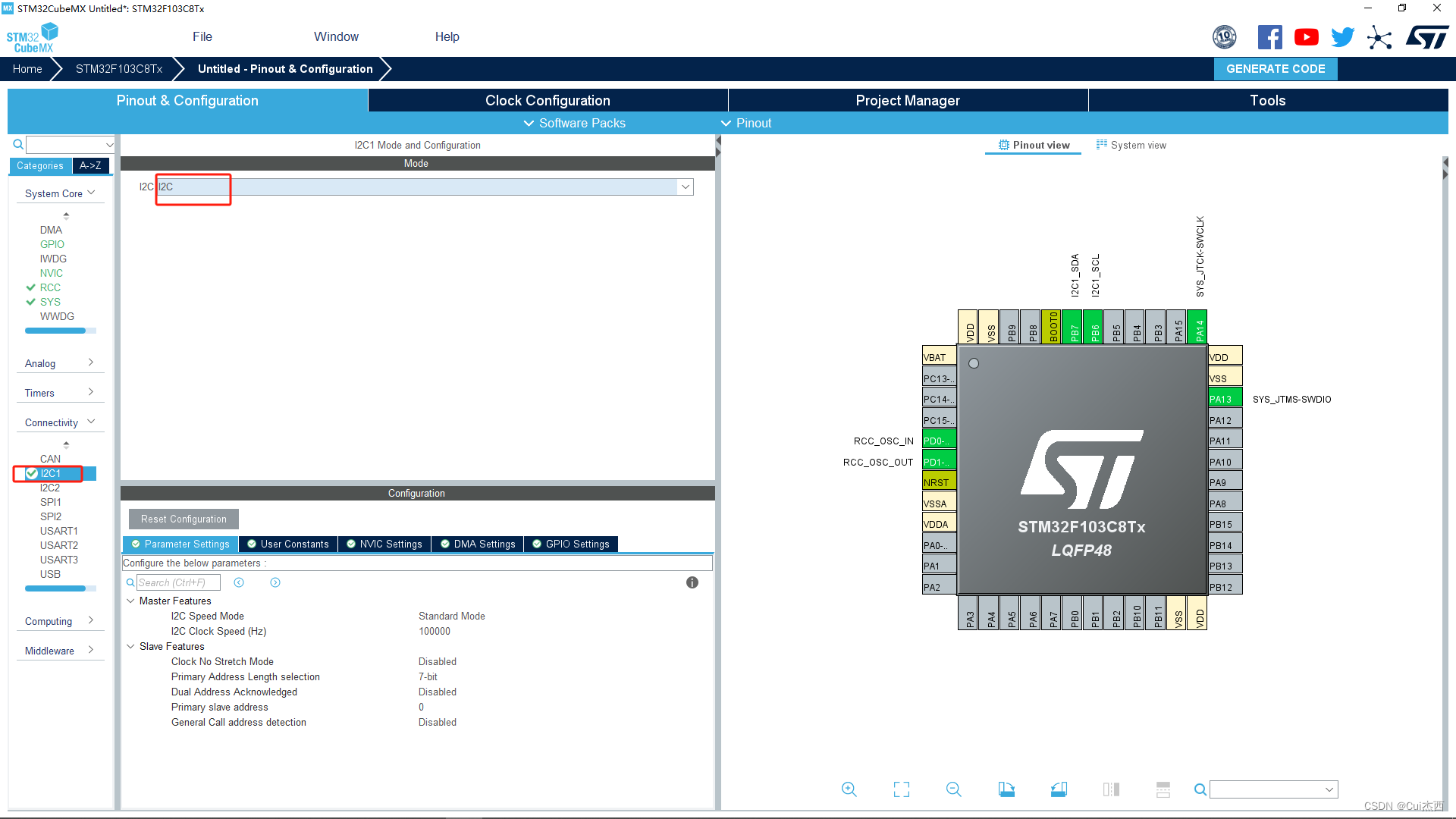
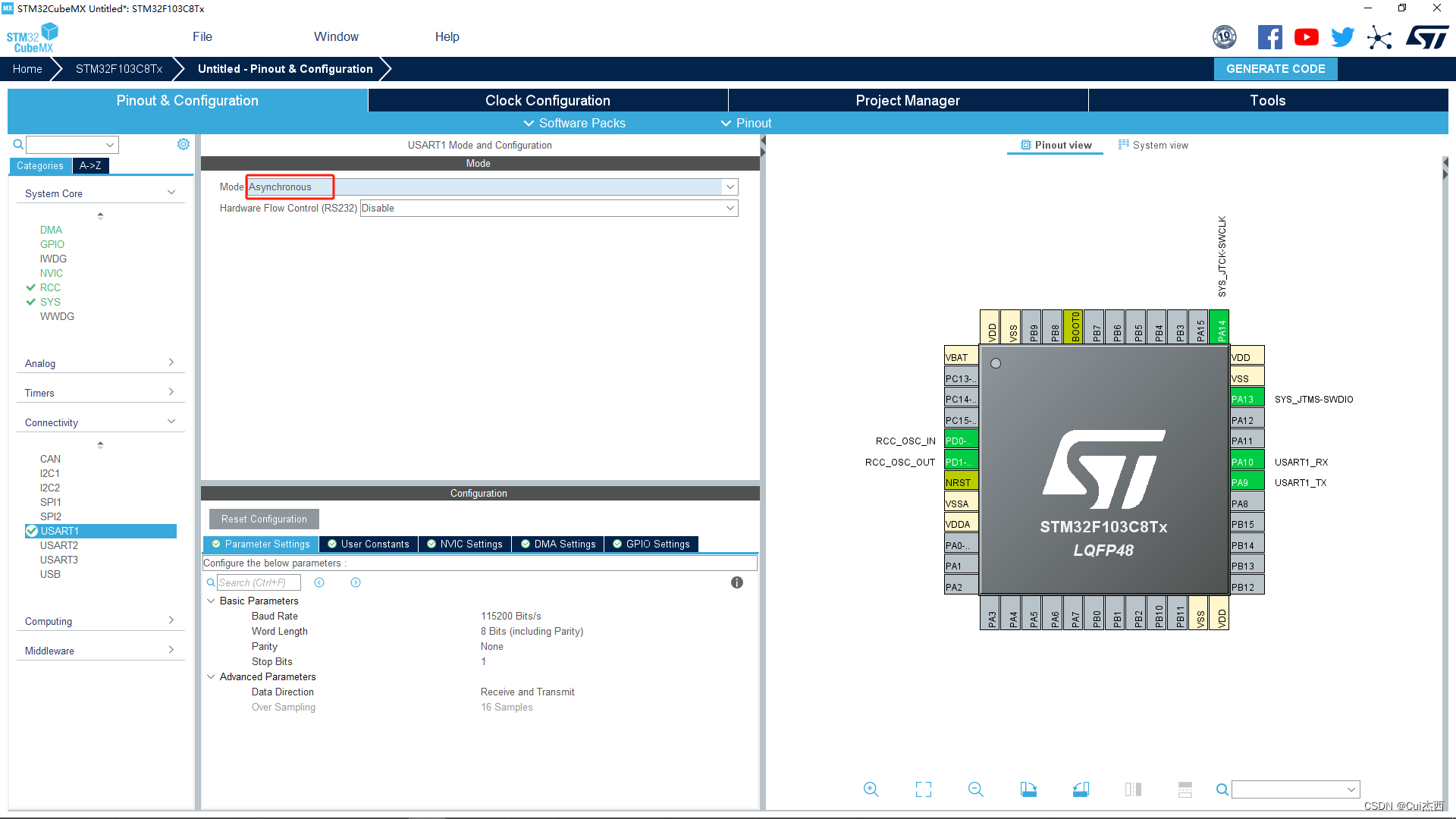
- STM32CubeMx工程配置
4. 重做上官一号的IIC实验(353.57)
- 接线:
- SCL – PB6
- SDA – PB7
- 代码(22.oled_test/MDK-ARM)(重新封装了Oled_Write_Cmd、Oled_Write_Data,其他和51代码一样)
5. SPI及W25Q128介绍(354.58)
SPI 是什么?
- SP I是串行外设接口(Serial Peripheral Interface)的缩写,是一种高速的,全双工,同步的通信总线,并且
在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为 PCB 的布局上节省空间,提供方便,正是出于这
种简单易用的特性,越来越多的芯片集成了这种通信协议,比如 AT91RM9200 。
SPI 物理架构
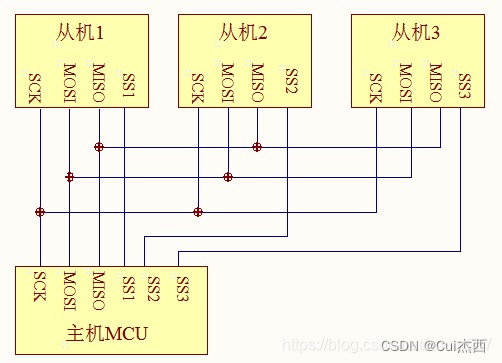
- SPI 包含 4 条总线,SPI 总线包含 4 条总线,分别为 SS、SCK、MOSI、MISO。它们的作用介绍如下 :
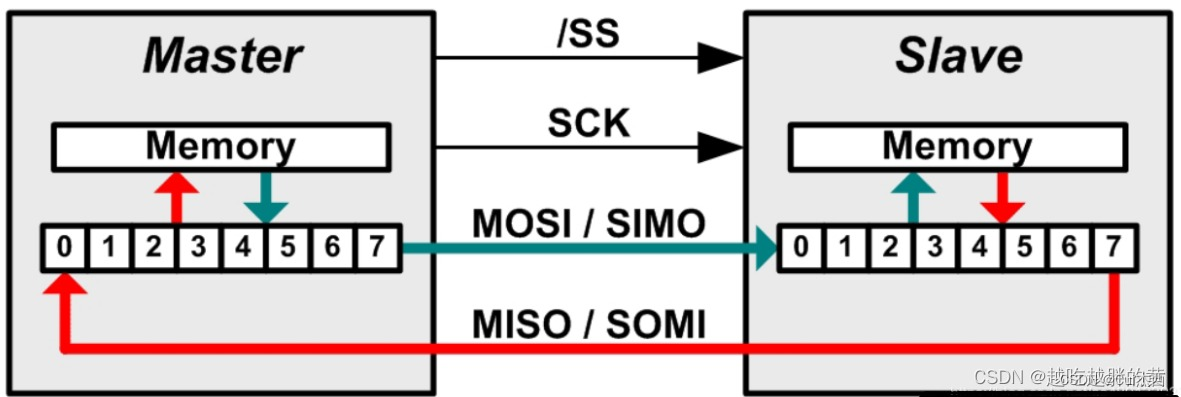
(1) MISO – Master Input Slave Output,主设备数据输入,从设备数据输出
(2) MOSI – Master Output Slave Input,主设备数据输出,从设备数据输入
(3) SCK – Serial Clock,时钟信号,由主设备产生
(4) CS – Chip Select,片选信号,由主设备控制
SPI 工作原理
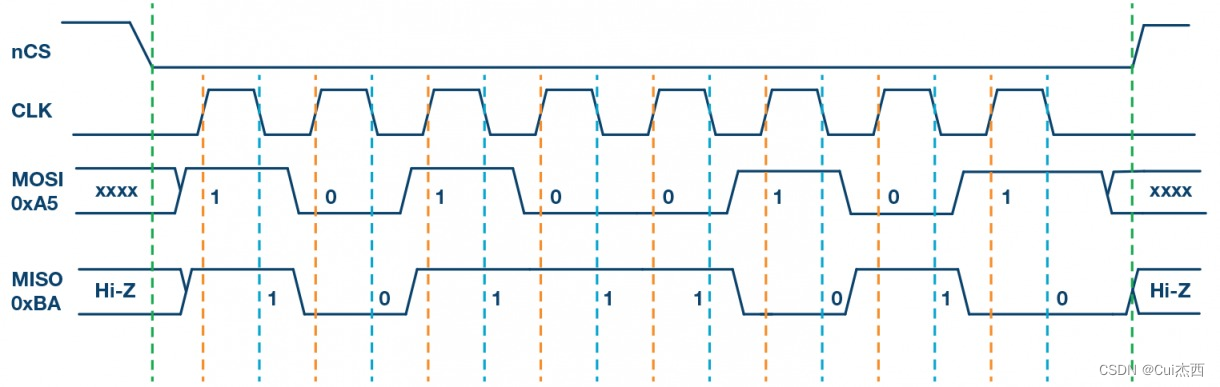
SPI 工作模式
- 时钟极性(CPOL):
- 没有数据传输时时钟线的空闲状态电平
- 0:SCK在空闲状态保持低电平
- 1:SCK在空闲状态保持高电平
- 时钟相位(CPHA):
- 时钟线在第几个时钟边沿采样数据
- 0:SCK的第一(奇数)边沿进行数据位采样,数据在第一个时钟边沿被锁存
- 1:SCK的第二(偶数)边沿进行数据位采样,数据在第二个时钟边沿被锁存

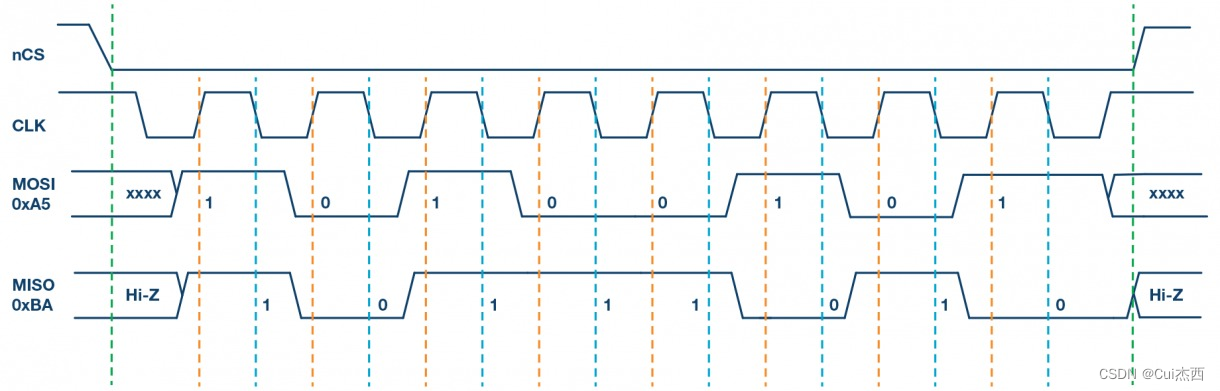
- 模式 0 和模式 3 最常用。
- 模式 0 时序图:
- 模式 3 时序图:
什么是 W25Q128 ?
- W25Q128 是华邦公司推出的一款 SPI 接口的 NOR Flash 芯片,其存储空间为 128 Mbit,相当于 16M 字
节。 - Flash 是常用的用于储存数据的半导体器件,它具有容量大,可重复擦写、按“扇区/块”擦除、掉电后数据可
继续保存的特性。 - Flash 是有一个物理特性:只能写 0 ,不能写 1 ,写 1 靠擦除。
W25Q128 存储架构
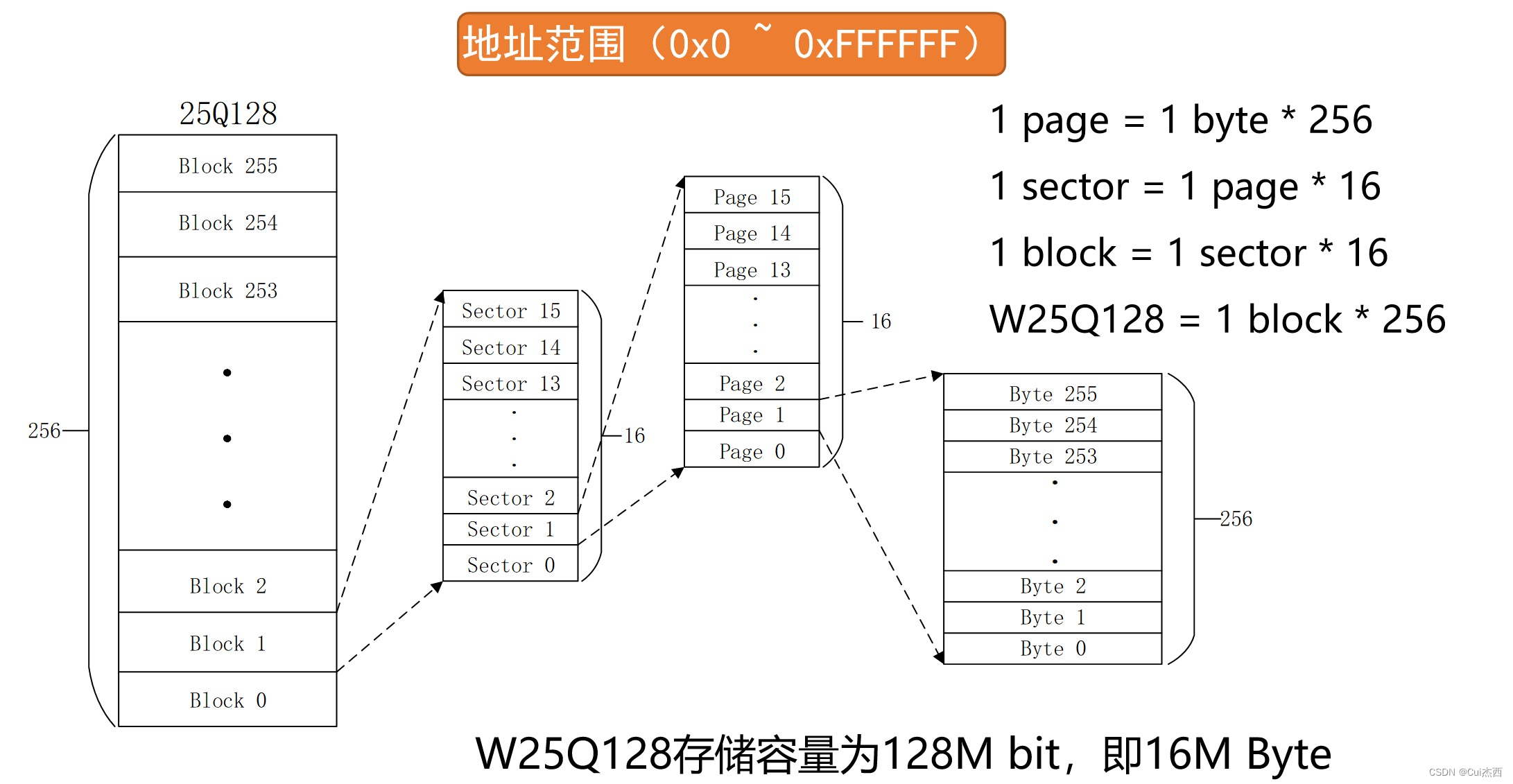
- 一般按扇区(4k)进行擦除。
- 可以按 章 – 节 – 页 – 字 进行理解。
W25Q128 常用指令
- W25Q128 全部指令非常多,但常用的如下几个指令:

- 写使能 (06H)
- 执行页写,扇区擦除,块擦除,片擦除,写状态寄存器等指令前,需要写使能。
- 拉低 CS 片选 → 发送 06H → 拉高 CS 片选
- 读状态寄存器(05H)
- 拉低CS片选 → 发送05H→ 返回SR1的值 → 拉高CS片选
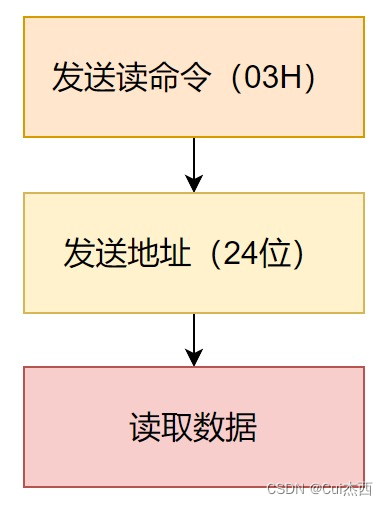
- 读时序(03H)
- 拉低CS片选 → 发送03H→ 发送24位地址 → 读取数据(1~n) → 拉高CS片选
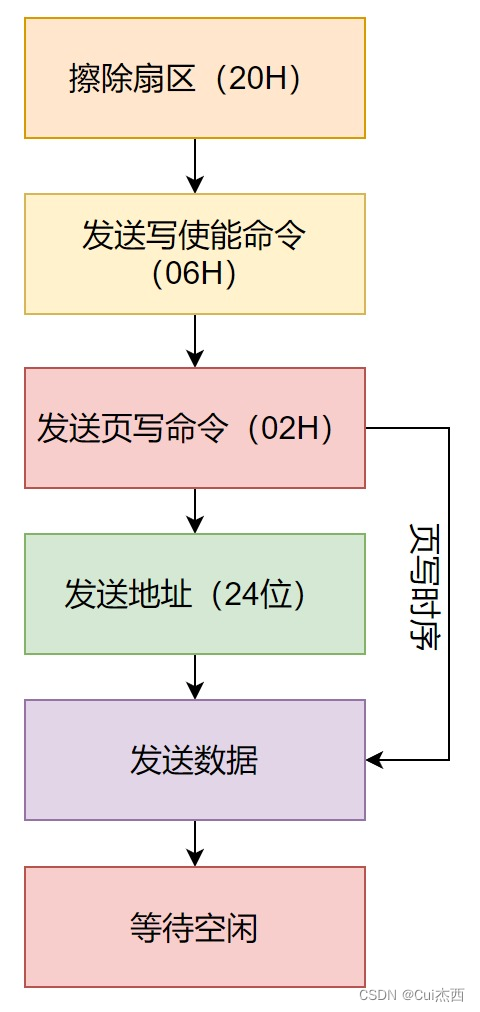
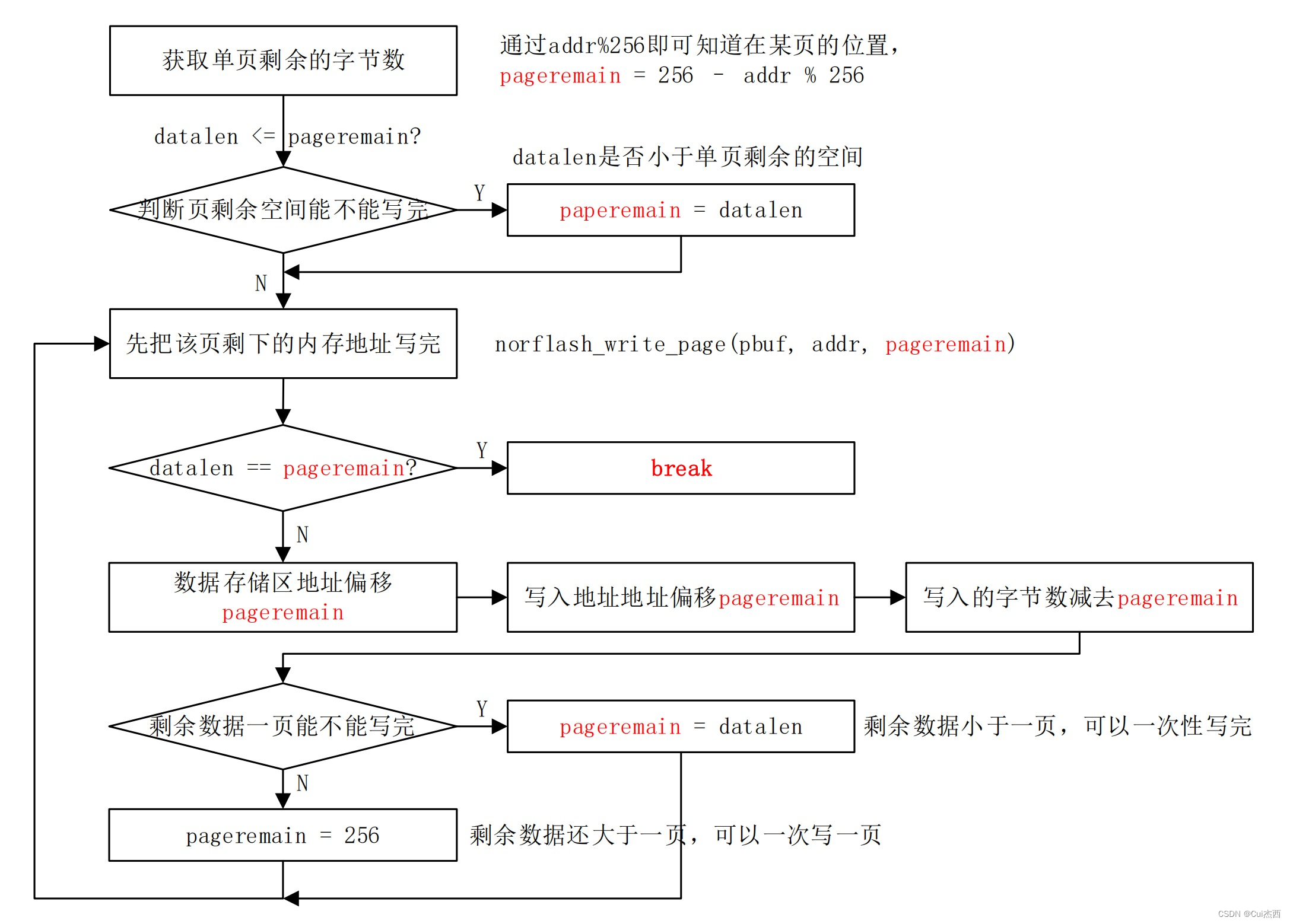
- 页写时序 (02H)
- 页写命令最多可以向FLASH传输256个字节的数据。
- 拉低CS片选 → 发送02H→ 发送24位地址 → 发送数据(1~n) → 拉高CS片选
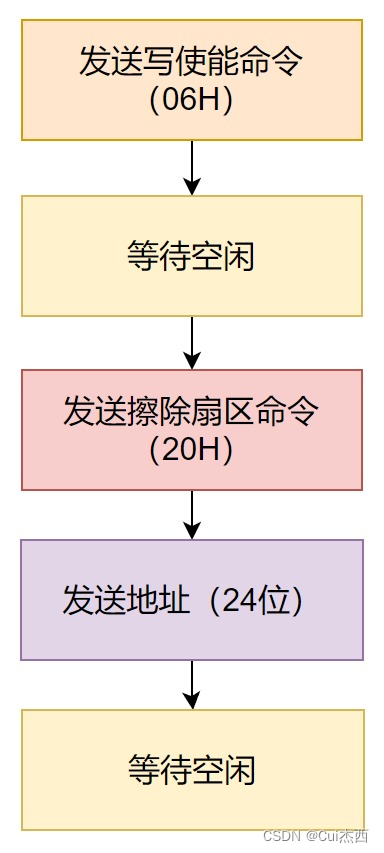
- 扇区擦除时序(20H)
- 写入数据前,检查内存空间是否全部都是 0XFF ,不满足需擦除。
- 拉低CS片选 → 发送20H→ 发送24位地址 → 拉高CS片选
W25Q128 状态寄存器
- W25Q128 一共有 3 个状态寄存器,它们的作用是跟踪芯片的状态。
- 其中,状态寄存器 1 较为常用。
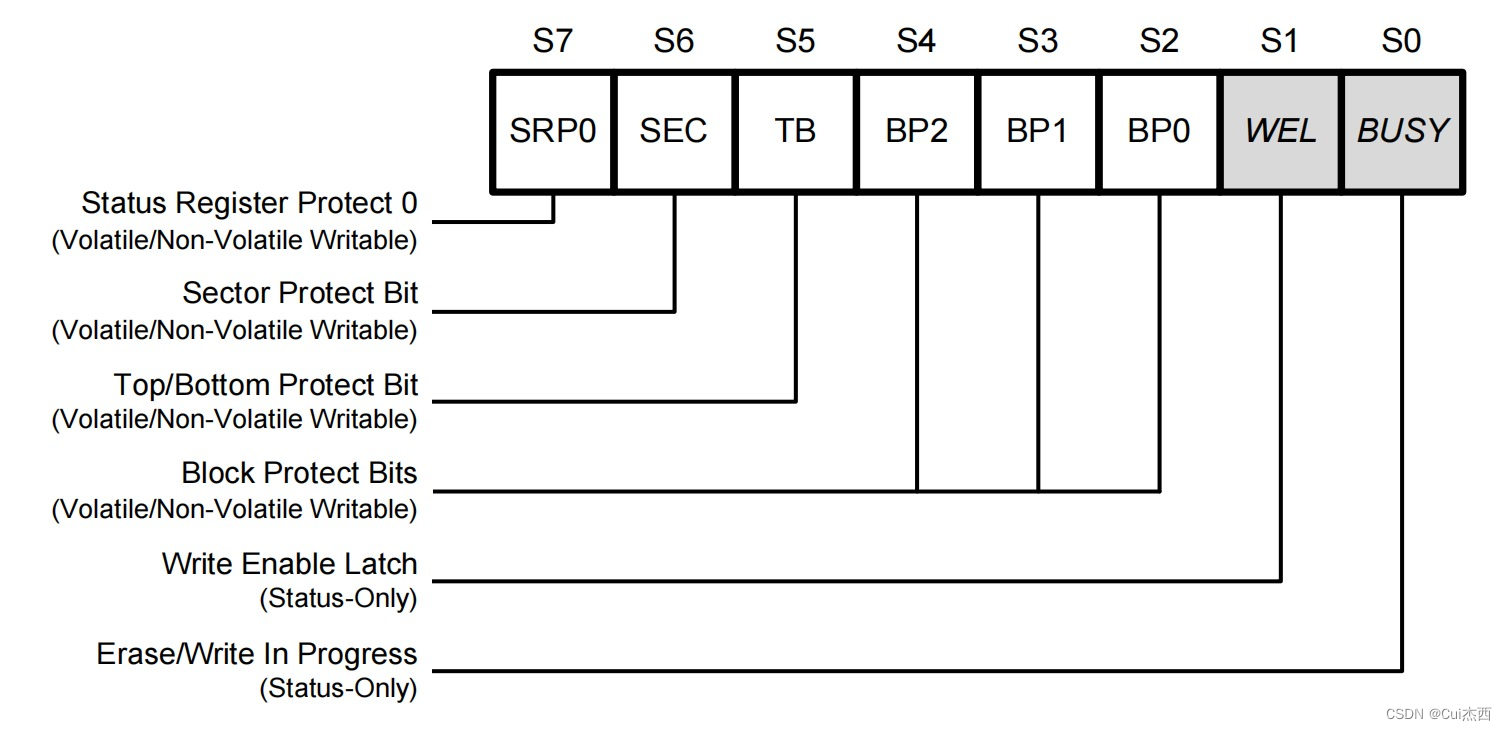
- BUSY:指示当前的状态,0 表示空闲,1 表示忙碌
- WEL:写使能锁定,为 1 时,可以操作页/扇区/块。为 0 时,写禁止。
W25Q128 常见操作流程
- 以下流程省略了拉低/拉高片选信号CS。
- 读操作:
- 擦除扇区:
- 写操作:
5. 使用SPI通讯读写W25Q128模块(355.59)
硬件接线
- VCC – 3.3V
- CS – PA4
- CLK – PA5
- DO – PA6
- DI – PA7
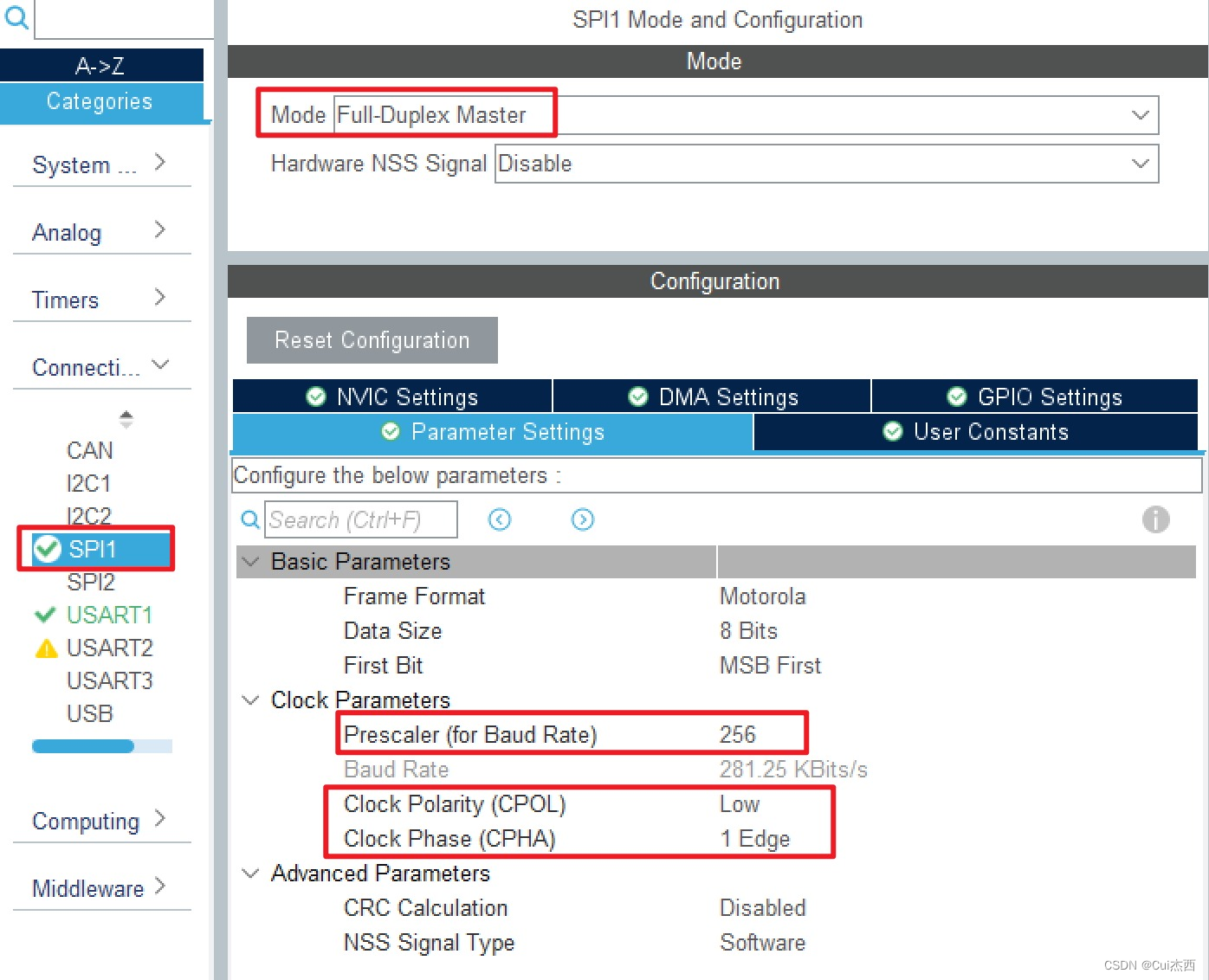
cubeMX配置
w25q128_write_nocheck流程图
- 代码(27.spi_test/MDK-ARM)
6. LCD1602介绍及实战(356.60)
项目需求
- 使用温湿度传感器模块(DHT11)获取温度及湿度,并将值显示在LCD1602上,同时通过蓝牙模块透传到手
机。
项目框图
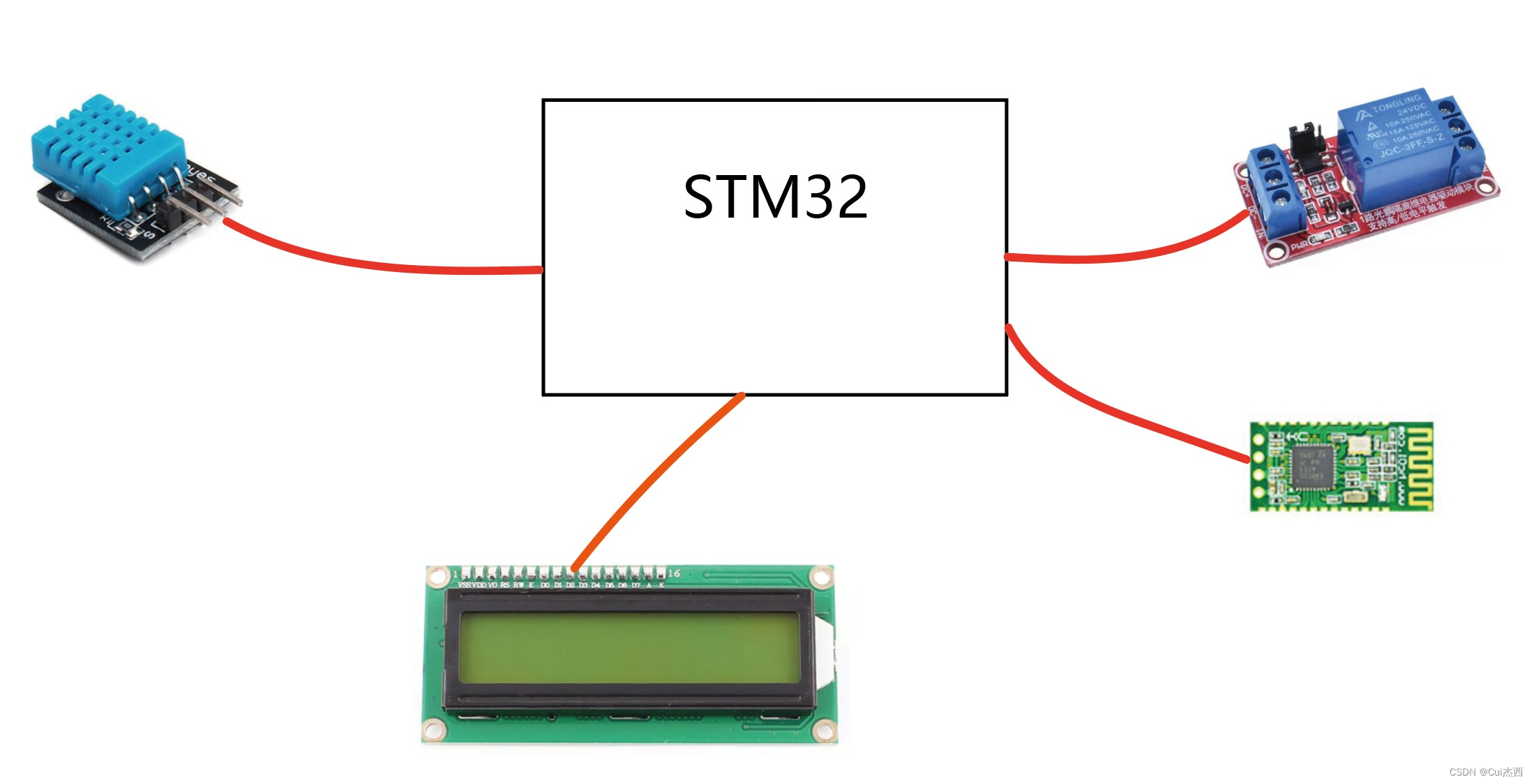
硬件清单
- DHT11
- LCD1602
- HC-08
- 继电器
- 杜邦线
LCD1602硬件接线
- D0 ~ D7 – A0 ~ A7
- RS – B1
- RW – B2
- EN – B10
- V0 – GND(正视看不到显示结果,需要侧着看。否则需要接可调电阻)
- VSS – GND
- VDD – 5V(工作电源)
- BLA – 5V(背光灯电源)
- BLK – GND
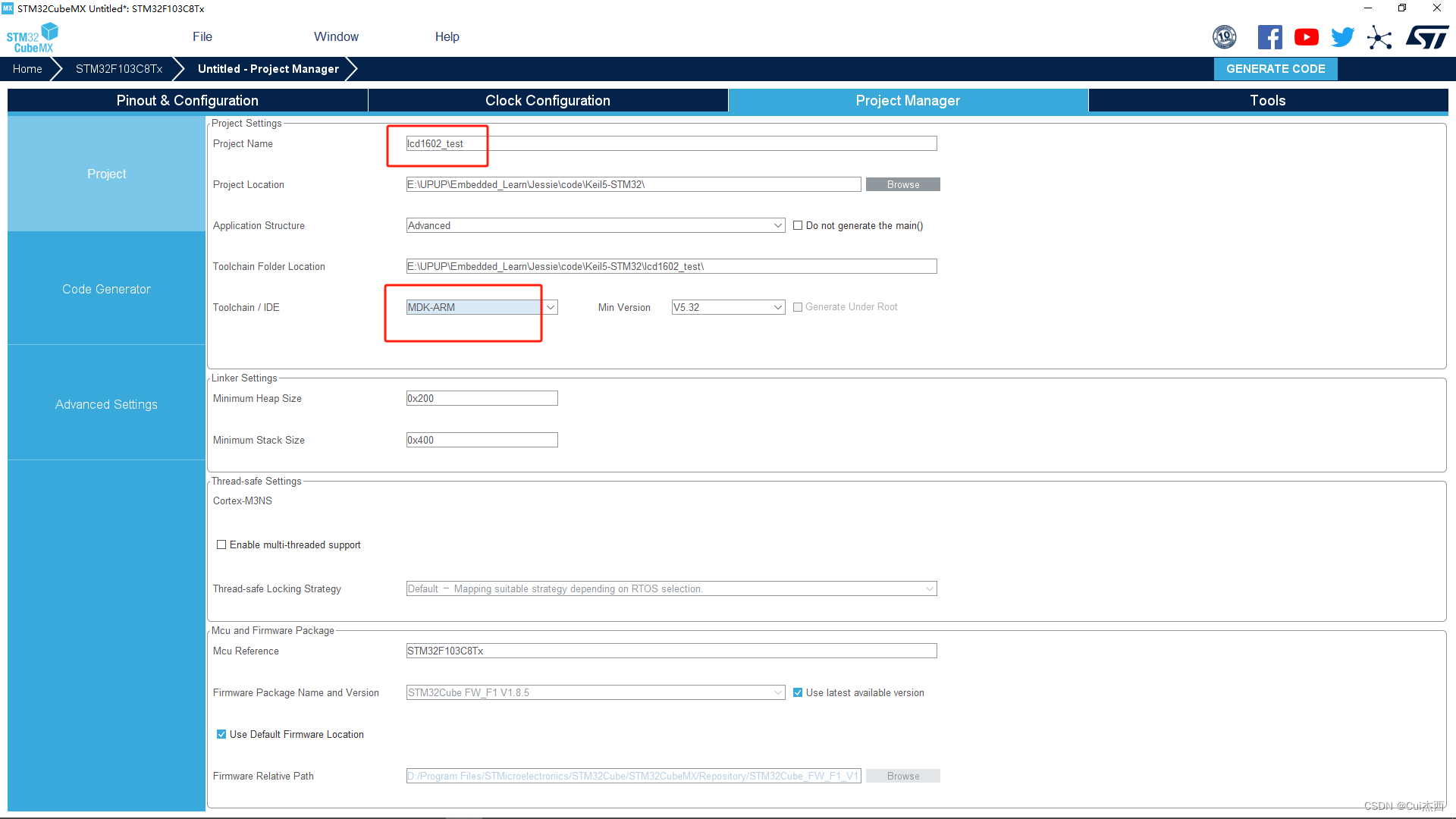
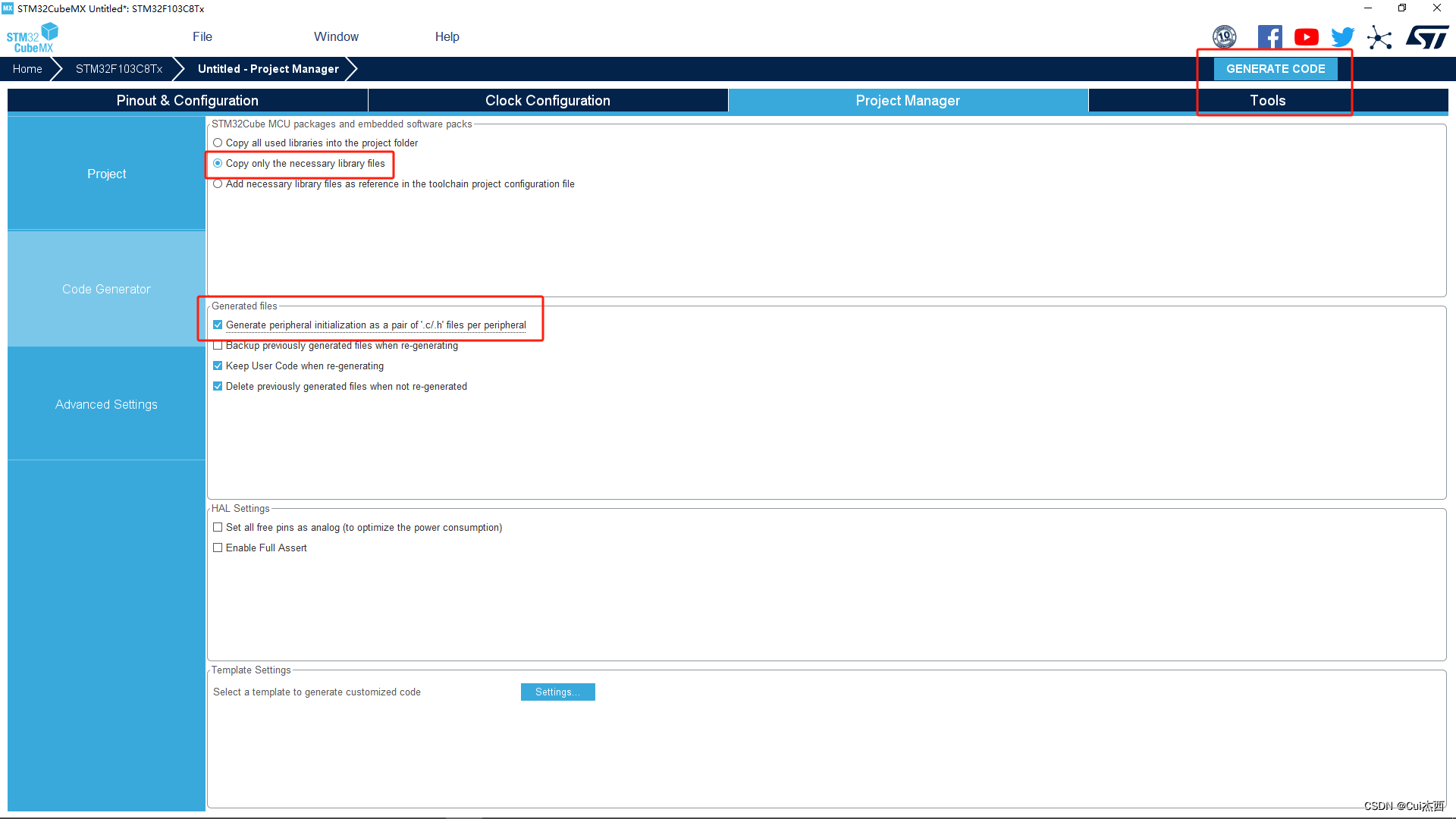
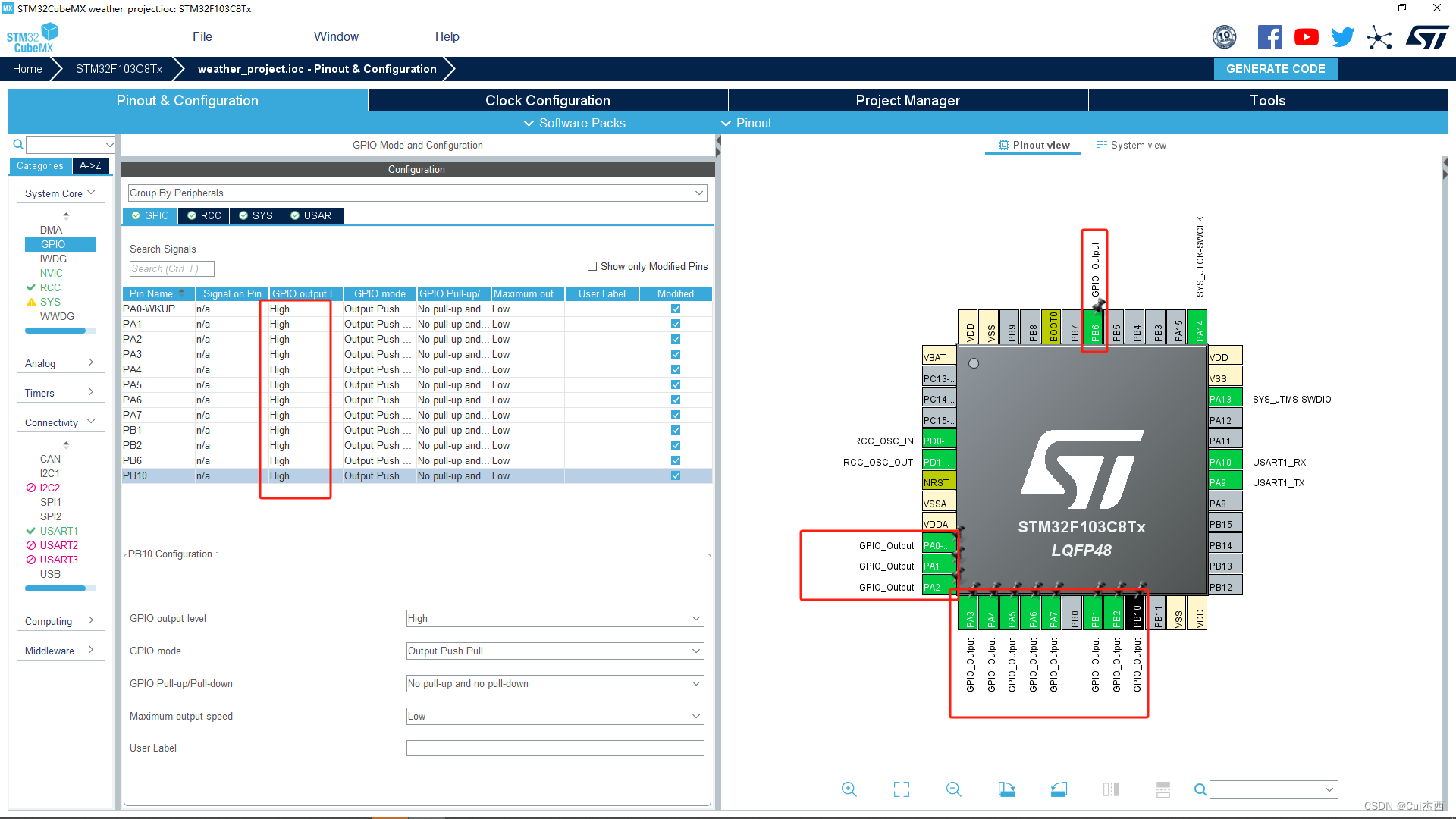
cubemx配置
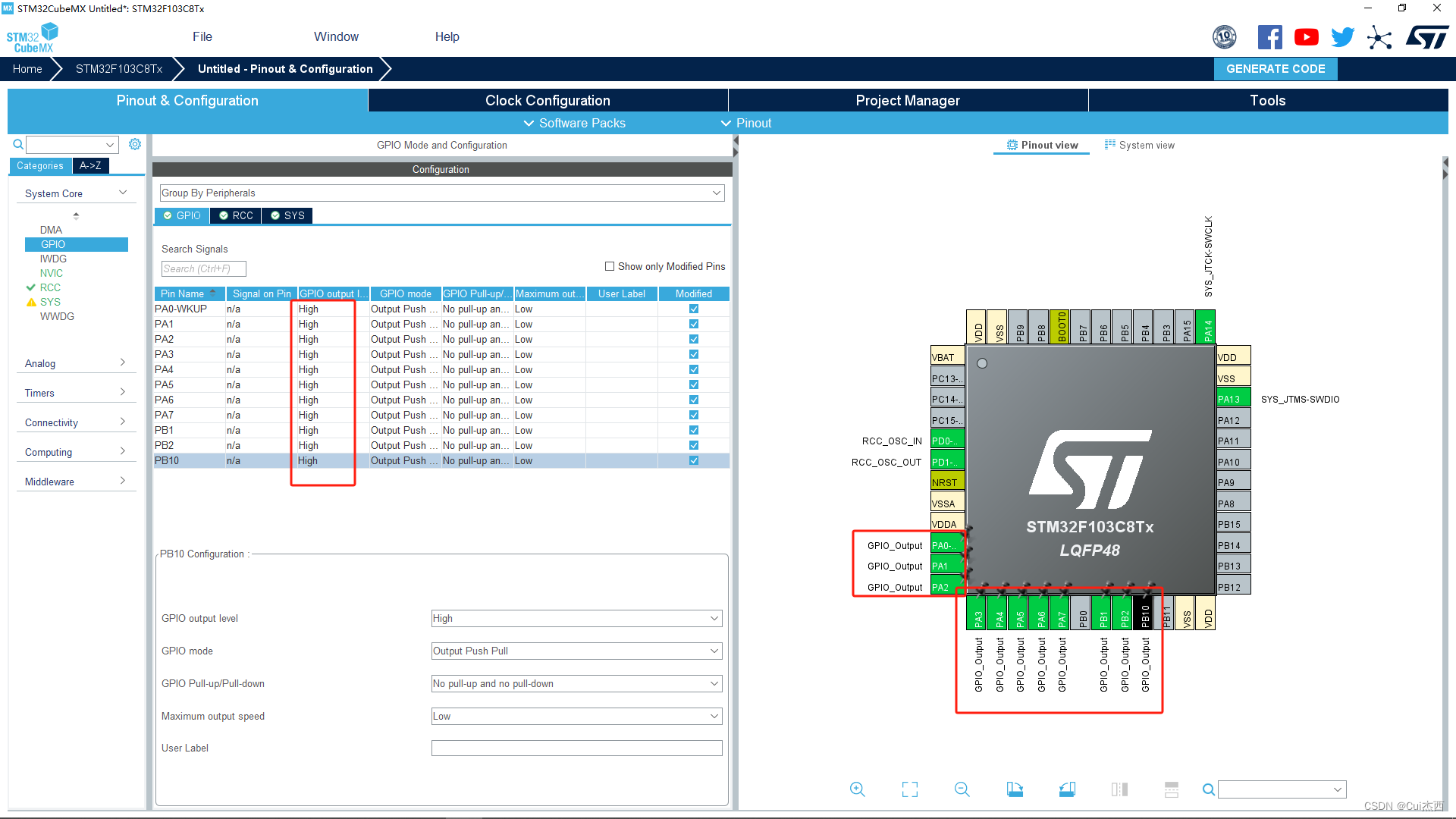
引脚封装
- RS、RW、EN三根信号线经常需要进行拉高/拉低操作,可以进行封装
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_Pin GPIO_PIN_1
#define RW_Pin GPIO_PIN_2
#define EN_Pin GPIO_PIN_10
#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_SET)
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_SET)
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_SET)
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_RESET)
- 如何将一个字节的数据按位一次性发送到GPIOA的8个管脚?
GPIOA->ODR = cmd;
代码实现
代码(24.lcd1602_test/MDK-ARM)
#define RS_GPIO_Port GPIOB
#define RW_GPIO_Port GPIOB
#define EN_GPIO_Port GPIOB
#define RS_Pin GPIO_PIN_1
#define RW_Pin GPIO_PIN_2
#define EN_Pin GPIO_PIN_10
#define RS_HIGH HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_SET)
#define RS_LOW HAL_GPIO_WritePin(RS_GPIO_Port, RS_Pin, GPIO_PIN_RESET)
#define RW_HIGH HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_SET)
#define RW_LOW HAL_GPIO_WritePin(RW_GPIO_Port, RW_Pin, GPIO_PIN_RESET)
#define EN_HIGH HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_SET)
#define EN_LOW HAL_GPIO_WritePin(EN_GPIO_Port, EN_Pin, GPIO_PIN_RESET)
void Write_Cmd_Func(uint8_t cmd)
{RS_LOW;RW_LOW;EN_LOW;GPIOA->ODR = cmd;HAL_Delay(5);EN_HIGH;HAL_Delay(5);EN_LOW;
}
void Write_Data_Func(uint8_t dataShow)
{RS_HIGH;RW_LOW;EN_LOW;GPIOA->ODR = dataShow;HAL_Delay(5);EN_HIGH;HAL_Delay(5);EN_LOW;
}
void LCD1602_INIT(void)
{
//(1)延时 15msHAL_Delay(15);
//(2)写指令 38H(不检测忙信号)Write_Cmd_Func(0x38);
//(3)延时 5msHAL_Delay(5);
//(4)以后每次写指令,读/写数据操作均需要检测忙信号
//(5)写指令 38H:显示模式设置Write_Cmd_Func(0x38);
//(6)写指令 08H:显示关闭Write_Cmd_Func(0x08);
//(7)写指令 01H:显示清屏Write_Cmd_Func(0x01);
//(8)写指令 06H:显示光标移动设置Write_Cmd_Func(0x06);
//(9)写指令 0CH:显示开及光标设置}Write_Cmd_Func(0x0c);
}
void LCD1602_showLine(char row, char col, char *string)
{switch(row){case 1:Write_Cmd_Func(0x80+col);while(*string){Write_Data_Func(*string);string++;}break;case 2:Write_Cmd_Func(0x80+0x40+col);while(*string){Write_Data_Func(*string);string++;}break;}
}
//main函数里://char position = 0x80 + 0x05;//char dataShow = 'C';LCD1602_INIT();//Write_Cmd_Func(position);//选择要显示的地址//Write_Data_Func(dataShow);//发送要显示的字符LCD1602_showLine(1,6,"NO.2");LCD1602_showLine(2,0,"Jessie handsome");
7. DHT11介绍及实战(357.61)
硬件接线
- VCC – 5V
- GND – GND
- DAT – PB7
- 注意:PB7既作为输入,也作为输出,则不能直接在CubeMX里配置,需要自己写代码
cubemx配置
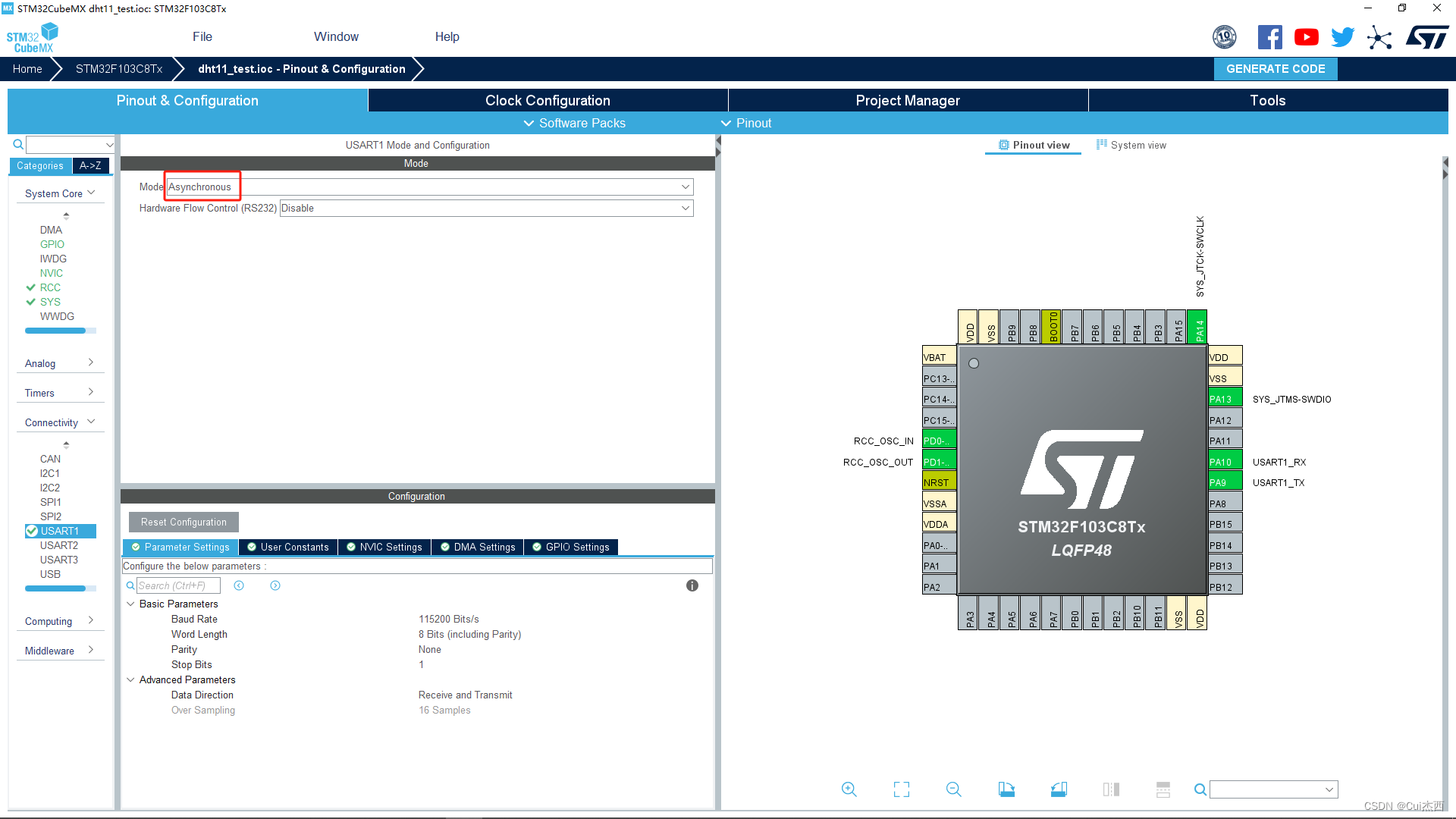
代码实现
#define DHT_HIGHT HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET)
#define DHT_LOW HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET)
#define DHT_VALUE HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7)
uint8_t datas[5];
void delay_us(uint16_t cnt)
{uint8_t i;while(cnt){for (i = 0; i < 10; i++){}cnt--;}
}
void DHT_GPIO_Init(uint32_t Mode)
{ GPIO_InitTypeDef GPIO_InitStruct = {0};__HAL_RCC_GPIOB_CLK_ENABLE();GPIO_InitStruct.Pin = GPIO_PIN_7;GPIO_InitStruct.Mode = Mode;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void DHT11_Start(void)
{DHT_GPIO_Init(GPIO_MODE_OUTPUT_PP);DHT_HIGHT;DHT_LOW;HAL_Delay(30);DHT_HIGHT;DHT_GPIO_Init(GPIO_MODE_INPUT);while(DHT_VALUE);while(!DHT_VALUE);while(DHT_VALUE);
}
void Read_Data_From_DHT()
{int i;//轮int j;//每一轮读多少次char tmp;char flag;DHT11_Start();DHT_GPIO_Init(GPIO_MODE_INPUT);for(i= 0;i < 5;i++){for(j=0;j<8;j++){while(!DHT_VALUE);//等待卡g点delay_us(40);if(DHT_VALUE == 1){flag = 1;while(DHT_VALUE);}else{flag = 0;}tmp = tmp << 1;tmp |= flag;}datas[i] = tmp;}
}
int fputc(int ch, FILE *f)
{ unsigned char temp[1]={ch};HAL_UART_Transmit(&huart1,temp,1,0xffff); return ch;
}
int main(void)
{HAL_Init();SystemClock_Config();MX_GPIO_Init();MX_USART1_UART_Init();
printf("Jessie handsome\r\n");
HAL_Delay(2000);while (1){Read_Data_From_DHT();printf("Humi: %d.%d%% ", datas[0], datas[1]);printf("Temp: %d.%d\r\n ", datas[2], datas[3]);HAL_Delay(2000);}
}

8. 整合DHT11及LCD1602(358.62)
项目设计
- 继电器数据线插在PB6上,DHT11及LCD1602接线与上述相同。
项目实现
- 注意点:
- 将Use MicroLIB的勾打上;
- 在main函数把串口中断打开;
- 使用蓝牙模块时,将波特率设置为9600
9. 温湿度LCD显示并占传服务器项目完结(359.63)
char message[16];
while (1)
{Read_Data_From_DHT();if(datas[2] >= 24)HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_RESET);elseHAL_GPIO_WritePin(GPIOB, GPIO_PIN_6, GPIO_PIN_SET);memset(message, 0, sizeof(message));sprintf(message, "Humi: %d.%d%%", datas[0], datas[1]);LCD1602_showLine(1,0, message);sprintf(message, "Temp: %d.%d", datas[2], datas[3]);LCD1602_showLine(2,0, message);HAL_Delay(2000);
}