目标:掌握ros的python编程
基本教程:https://www.bilibili.com/video/BV1sU4y1z7mw/?spm_id_from=333.788&vd_source=32148098d54c83926572ec0bab6a3b1d
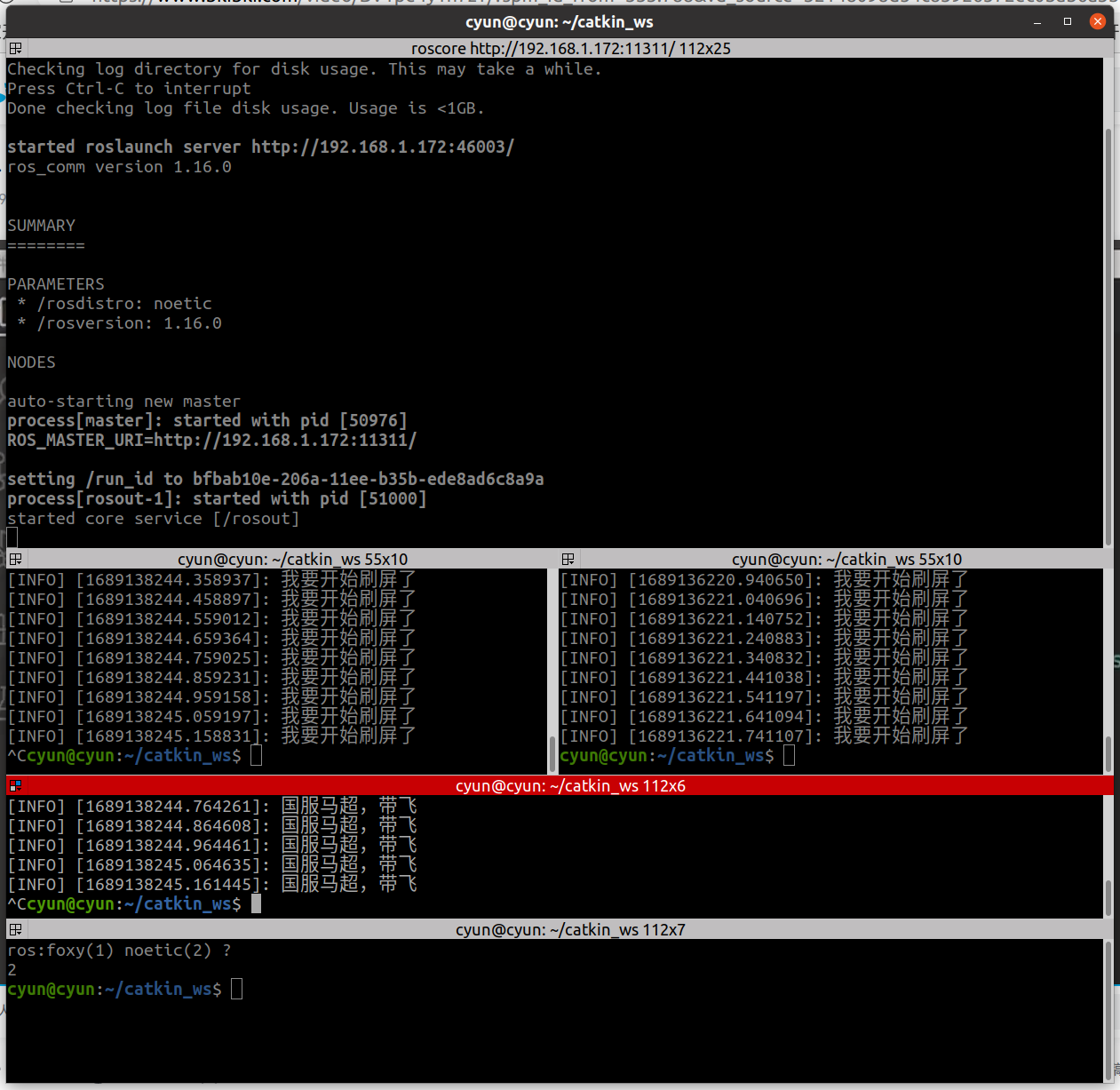
terminator
快捷键需要自己去重新启用
ctrl+shift+e 横向分屏
ctrl+shift+o 纵向分屏
ctrl+shift+w 取消分屏
去除占用
阿杰的ws的使用
git clone https://github.com/6-robot/wpr_simulation.git
在script中:
./install_for_noetic.sh
(注意学习怎么写sh脚本快速执行指令了)
source——载入工作空间的环境设置
roslaunch wpr_simulation wpb_simple.launch
rosrun rqt_robot_steering rqt_robot_steering # 速度控制
第二个功能包:
git clone https://github.com/ros/ros_tutorials.git
###怎么指定编译一个功能包 ###catkin_make -DCATKIN_WHITELIST_PACKAGES=“package1;package2”
roscore
rosrun turtlesim turtlesim_node
修改了源码后打开rosrun发生了变化,说明是确实对应的
roscore
rosrun ssr_pkg chao_node
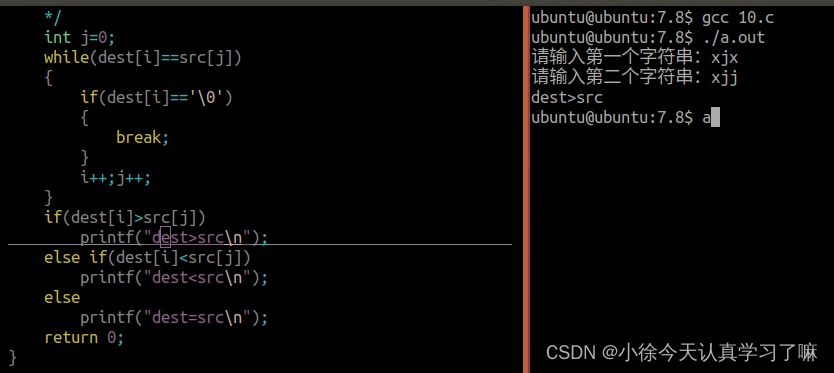
写第一个cpp源程序和ros通信的节点程序
显示有乱码:
rostopic echo 话题名称
录制数据msg:
rosbag record /topic_name 录制话题
rosbag info 查看话题名称、类型、消息数量
rosbag play name.bag 回放数据包
rqt显示工具:
rosrun rqt_tf_tree rqt_tf_tree
rosrun rqt_graph rqt_graph
rosrun rqt_plot rqt_plot
rosrun rqt_topic rqt_topic # 这个不错,监控话题及数据
不好用rosrun
直接拿出工具来用:
查看话题类型:
rostopic type /话题
rosmsg show 话题类型 #比如说geometry_msgs/Twist:
这样:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
rqt_plot /话题/X # x是消息
echo -e 复制一下消息(注意带"")
python实现节点消息发布和订阅:
rosrun ssr_pkg chao_node.py
自定义消息类型:
add_message_files(
FILES
Carry.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)
CATKIN_DEPENDS message_generation message_runtime roscpp rospy std_msgs
修改package.xml:
只需要加上 <build_depend>message_runtime</build_depend> <exec_depend>message_generation</exec_depend>
即可
<buildtool_depend>catkin</buildtool_depend>
<build_depend>message_generation</build_depend>
<build_depend>message_runtime</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>message_runtime</exec_depend>
<exec_depend>message_generation</exec_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
总结一下,重点的内容是:catkin_make -DCATKIN_WHITELIST_PACKAGES="package1;package2"rostopic echo 话题名称
rostopic type /话题如果打印出来的话数据有乱码,那就复制一下,然后echo -e 复制一下消息(注意带"")录制数据msg:
rosbag record /topic_name 录制话题
rosbag info 查看话题名称、类型、消息数量
rosbag play name.bag 回放数据包rqt显示工具:
rosrun rqt_tf_tree rqt_tf_tree
rosrun rqt_graph rqt_graph
rosrun rqt_plot rqt_plot
rosrun rqt_topic rqt_topic # 这个不错,监控话题及数据注意,基本没有必要输入这么一大串,只需要:
rqt_tf_tree
rqt_graph
rqt_plot
rqt_topic