原创 | 文 BFT机器人
制造商在其操作中使用各种类型的机器人,每种机器人都具有特定的能力和功能。我们将讨论制造业中使用的一些最常见类型的机器人,以及哪种机器人可能最适合您的应用。
01
关节机器人
关节式机器人是一种工业机器人,具有一系列关节,使其能够像人的手臂一样移动。这些关节通常是旋转关节,可以在一定范围内移动,为机器人提供灵活性和机动性。
关节式机器人的手臂通常由若干段组成,每段连接到一个关节。这些段可以是直的或弯曲的,具体取决于特定的机器人型号和应用。手臂的末端通常连接有一个工具或末端执行器,如夹爪或专用工具,用于特定操作。关节式机器人具有多功能性,可以执行各种任务,如焊接、物料搬运、装配和检测,它们可以在狭小的空间中工作,可以越过障碍物,使其非常适用于复杂的制造操作。它们覆盖多种运动的能力使其更适应生产过程或工件的变化。
关节式机器人通常可以承载较大的负载,目前FANUC机器人的最大负载能力可达2300kg。它们还可以以较高的速度和高精度工作,提高生产效率和质量。
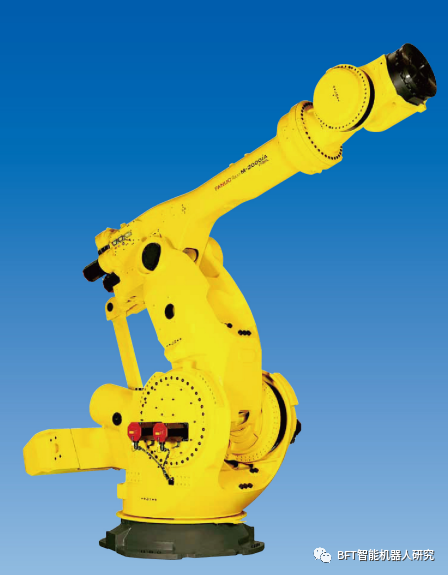
图片来源:FANUC M-2000iA/2300
02
SCARA机器人
SCARA机器人是一种工业机器人,其手臂结构类似于关节式机器人,但具有固定基座。SCARA的首字母缩写代表选择性组装机器人手臂。
SCARA机器人的手臂由两个平行关节组成,允许手臂在水平平面内移动,带有第三个关节,允许手臂上下移动。这种设计使机器人具有更高的刚性和准确性,使其非常适用于需要在水平平面内进行精确运动的应用,如拾取和放置操作。此类机器人通常用于装配、检测和包装应用,其中需要高度的精度和可重复性。它们也可以以较高的速度工作,使其非常适用于大批量的制造操作。
SCARA机器人是制造业应用中精度和速度至关重要的情况下的热门选择。它们提供高水平的精确性、可重复性和灵活性,使其成为寻求提高生产效率和产量的制造商的宝贵工具。

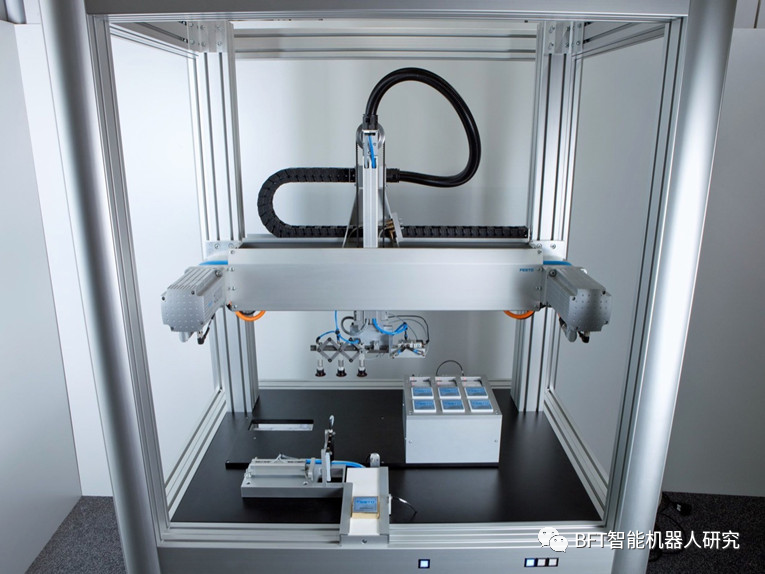
图片来源:KR6 R500 Z200
03
Cartesian机器人
Cartesian机器人,也称为门式机器人或线性机器人,是一种沿着直角坐标系移动的工业机器人,创造一个三维的立方体空间。名称“笛卡尔”来自描述空间位置的笛卡尔坐标系。
这些机器人通常包括一个固定的基座和一个沿X和Y轴移动的顶部门架。Z轴由一个垂直柱提供,可以上下移动,通常附有一个工具或末端执行器。Cartesian机器人以提供精确和可重复运动而闻名,非常适用于需要高精度的应用。
Cartesian机器人最常用于拾取和放置操作、物料搬运和装配应用,它们可以以较高的速度工作并处理大型负载,使其非常适用于大规模制造操作。它们还可以轻松定制以适应特定的制造需求,例如添加视觉系统进行检测或引导。
图片来源:FUYU
04
Delta机器人
Delta机器人最常用于拾取和放置操作、包装和装配应用,其中需要高度的精度和速度。它们可以以非常高的速度工作,通常超过每分钟200个循环,并且能够以极高的准确性处理小型、轻量级物品。
它们通常用于食品和制药行业,其中卫生非常关键。三角形机器人也非常适用于洁净室环境,因为它们具有密封设计,防止污染物进入工作区域。

图片来源:ABB
05
协作机器人
协作机器人,也称为合作机器人或Cobots,是一种设计用于直接与人类在定义的协作工作区域内互动的机器人类型。与传统的工业机器人通常在安全栅后运行不同,协作机器人设计成可以在人类工作者附近紧密操作而不构成安全风险。
协作机器人配备了各种安全功能,如传感器和摄像头,可以检测到人的存在并相应地调整运动。它们还设计成重量轻、易于编程,使其能够快速部署在各种制造环境中。它们最常用于对人类工作者来说重复、危险或困难的任务,如物料搬运、装配和检测。它们可以执行各种制造任务,包括焊接、喷漆和包装。
协作机器人相对于传统工业机器人具有几个优势:它们更灵活,可以轻松重新编程以执行不同的任务,使其非常适用于小批量制造操作,它们还比传统机器人更具成本效益,使其可供更广泛范围的制造商使用。

图片来源:Franka
06
工业移动机器人(IMR)
移动机器人配备各种传感器和系统,使它们能够感知环境并根据该信息做出决策。例如,它们可以使用摄像头、激光雷达或超声波传感器来检测障碍物或绘制周围环境的地图。
在制造业中,移动机器人通常用于物流任务,如在工作站之间或到存储位置之间移动材料或产品。它们还可以用于质量控制和检测任务,其中它们可以在工作区域内移动以检查产品或设备。
总体而言,IMR相对于固定机器人具有几个优势,因为它们可以覆盖更大的区域,并在固定机器人无法访问的环境中工作。它们还可以轻松重新编程或重新配置,使其更加灵活,适应制造需求的变化。

图片来源:波士顿Handle机器人
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。