目录
一.一般传送指令,即mov指令
1.16位传送(仅1条)
2.8位传送
(1)目的字节为A(累加器)
(2)目的字节为Rn(工作寄存器)
(3)目的字节为direct
(4)目的字节为@Ri
二.特殊传送指令
1.读ROM中常数表的表项指令MOVC
(1)以DPTR内容为基址
(2)以PC内容为基址
2.读片外RAM及接口单元数据的指令MOVX
3.堆栈操作指令PUSH和POP
4.数据交换指令:XCH,XCHD和SWAP
(1)字节交换指令XCH
(2)半字节交换指令
看此篇文章前 ,建议回顾一下这篇文章(7种寻址方式):
http://t.csdnimg.cn/pzV8q
数据传送类指令是指计算机指令集中用于在寄存器之间或者内存和寄存器之间传输数据的指令。这些指令通常用于将数据从一个位置移动到另一个位置,或者从内存中加载数据到寄存器,反之亦然。
数据传送类指令通常不会直接影响标志寄存器的状态。这意味着当执行数据传送指令时,标志寄存器中的条件码通常不会被修改。
标志寄存器通常包含了一些用于控制程序执行流程的条件标志,比如零标志、进位标志、符号标志等。这些标志在执行算术运算或者逻辑运算时会被设置或清除,用于后续的条件分支或者其他操作。
而数据传送指令,比如将数据从一个寄存器复制到另一个寄存器,或者将数据从内存加载到寄存器中,这些操作并不直接涉及算术或逻辑运算,因此一般不会修改标志寄存器的状态。
传送类指令分为两类:一般传送,特殊传送
一.一般传送指令,即mov指令
1.16位传送(仅1条)
将16位的立即数,送到DPTR中,并且覆盖原来DPTR中的内容
MOV DPTR, #data16
例:执行指令MOV DPTR,#1234H后,(DPH)=?,(DPL)=?
(DPTR)=#1234H,其中(DPH)=#12H (DPL)=#34H
2.8位传送
通用格式:MOV <目的字节>,<源字节>;其中目的字节可以是A(累加器),Rn(工作寄存器),direct(寄存器的直接地址),@Ri(工作寄存器的间接寻址)
(1)目的字节为A(累加器)
其中“;”表示这条指令的注释,例如MOV A,Rn ; A<-(Rn)表示把Rn的内容复制一份,放到A中,覆盖A中原来的内容。

(2)目的字节为Rn(工作寄存器)
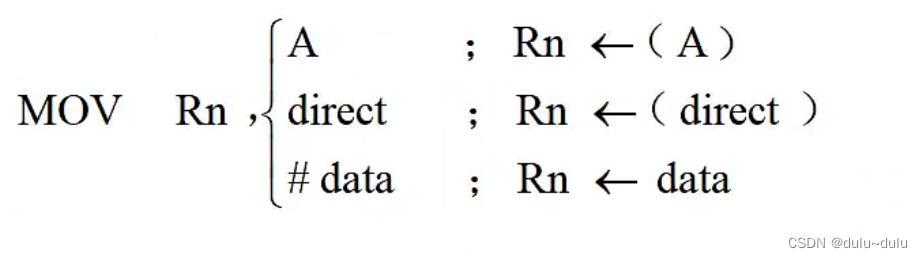
例1:执行指令 MOV R6,#50H后,(R6)=?
将立即数50H,放到R6中,并覆盖R6中原来的内容,所以(R6)=#50H
例2:编程实现将R3中的内容送入R4中
这句话不能翻译为MOV R3, R4,因为这句话目的字节是Rn时,原字节不能是工作寄存器
所以应该先将寄存器R3中的内容放到寄存器A中,再将A中的内容放到R4中
MOV A,R3
MOV R4,A
(3)目的字节为direct

例:若(R1)=#50和H,(50H)=#18H,执行指令MOV 40H,@R1后,(40H)=?
MOV 40H,@R1==MOV 40H,50H,所以(40H)=#18H
(4)目的字节为@Ri
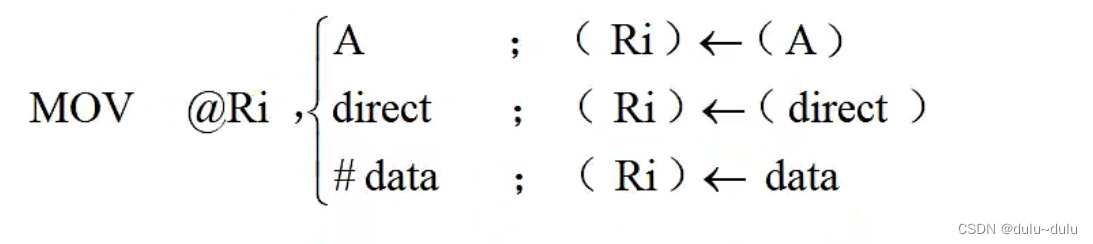 例:若(R1)=#30H,(A)=#20H,执行指令MOV @R1,A后,(30H)=?
例:若(R1)=#30H,(A)=#20H,执行指令MOV @R1,A后,(30H)=?
MOV @R1,A == MOV 30H,A,所以将A中的内容放到30H,将30H中原来的内容覆盖,所以(30H)=#20H
二.特殊传送指令
1.读ROM中常数表的表项指令MOVC
(1)以DPTR内容为基址
MOVC A,@A+DPTR;A<-((A)+(DPTR))

答案:B
(2)以PC内容为基址
MOVC A ,@A+PC; A<-((A)+(PC))
 1000H:MOVC A,@A+PC,表示程序存储器ROM中地址为1000H的存储单元存储的是MOVC A,@A+PC
1000H:MOVC A,@A+PC,表示程序存储器ROM中地址为1000H的存储单元存储的是MOVC A,@A+PC
A的内容是30H,而PC是下一条从程序存储器中取出指令的地址,所以PC=1001H,所以
MOVC A,@A+PC==MOVC A, 1031H,将地址为1031H的内容放到A中,覆盖A中的原来的内容
所以把程序存储器1031H单元的内容送入累加器A中
2.读片外RAM及接口单元数据的指令MOVX

注:用@Ri寻址时,高8位地址由P2口提供
关于读片外RAM:
MOV DPTR,#2040H:(DPTR)=#2040H
MOVX A,@DPTR:等价于MOVX A,2040H,表示将片外RAM,地址为2040H的内容,放到片内的累加寄存器A中,并且覆盖A中原来的内容。这就是读片外RAM
MOV 60H,A:把A中的内容复制一份,送到地址是60H的存储单元中,覆盖60H原来的内容
这个程序的功能:将片外RAM,地址是2040H的存储单元的数据,传送到了单片机内部地址是60H的存储单元中,并且覆盖了其原本的内容。
关于写片外RAM:
MOV A,40H:把40H中的内容复制一份,放到A中,并且覆盖A原本的内容
MOV DPTR ,#2560H:(DPTR)=#2560H
MOVX @DPTR,A:等价于MOVX 2560H,A ,表示把A的内容复制一份,放入片外RAM,地址为2560H的存储单元,并把其原来的内容覆盖,这就是写片外RAW
这个程序的功能: 将40H存储单元的数据,传送到片外RAM,地址为2560H的存储单元中,覆盖其原来的内容。
例:把外部数据存储器2040H单元中的数据传送到外部数据存储器2560H单元中去,试用汇编语言编写程序
思路:将片外RAM存储器2040H单元中的数据传送到累加寄存器A中,再从累加寄存器中写数据到片外RAM中
MOV DPTR ,#2040H
MOVX A,@DPTR
MOV DPTR,#2560H
MOVX @DPTR,A
注:不能写为 MOVX #2560H,#2040H

MOVX访问的是片外RAM,地址是16位二进制,P0口送低第八位,P2口送高八位,答案是B
(P2)=#20H,(R0)=#00H,MOVX A,@R0:表示读片外RAM,片外RAM地址高八位由P2提供,第八位地址由Ri提供,所以这个指令可以表示将片外RAM 2000H中的内容送到A中,所以(A)=2000H中的内容=#80H
3.堆栈操作指令PUSH和POP
堆栈用于子程序调用时保护返回地址或老用于保护子程序调用之前的某些重要数据(即保护现场),还可以用于数据交换。
堆栈是一片存储区,遵循“后进先出”原则,栈顶由SP指示。80C51的堆栈设在片内RAM低端的128个单元。
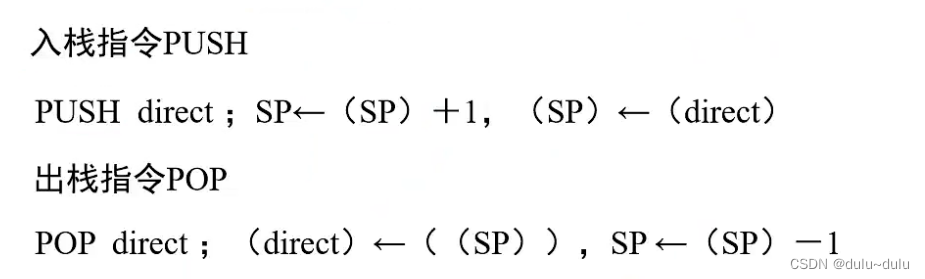
入栈指令:单片机先将SP的内容+1,再把寄存器的内容送到SP指向的内存单元中

执行PUSH A时,先将SP的内容+1((SP)=#61H),再将A的内容送入SP所指向的内存单元(61H):(61H)=#30H
执行PUSH A时,先将SP的内容+1((SP)=#62H),再将B的内容送入SP所指向的内存单元(62H):(62H)=#70H
所以SP的内容是62H,61H单元的内容是#30H,62H单元的内容是#70H
出栈指令:先将SP指向的单元的内容赋给寄存器,将SP的内容-1,赋给SP
由上题可知:SP的内容是62H,61H单元的内容是#30H,62H单元的内容是#70H
执行POP A,首先将SP指向的存储单元的内容送给A,所以(A)=#70H,SP的内容-1,所以(SP)=#61H
执行POP B,首先将SP指向的存储单元的内容送给B,所以(B)=#30H,SP的内容-1,所以(SP)=#60H
所以(SP)=#60H,(A)=#70H,(B)=#30H
可以看到单片机执行完这4条语句后,A,B的内容互换了
4.数据交换指令:XCH,XCHD和SWAP
(1)字节交换指令XCH
例:若(R0) = #80H,(A)= #20H。执行指令 XCH A,R0 后,(A)=? (R0) = ?

R0与A的内容呼唤,即(A)=#80H,(R0)=#20H
例:编程实现将内部数据存储器30H和31H单元的内容互换
思路:将30H存储单元的内容赋给A,再将A的内容与31H存储单元的内容呼唤,最后将A的内容赋给30H单元。
MOV A,30H
XCH A,31H
MOV 30H,A
(2)半字节交换指令

XCHD是间址操作数的低半字节与A的低半字节互换。

XCHD A,@R0==XCHD A, 30H,因为(A)=#20H,其中2表示高半字节,0表示低半字节
执行XCHD,操作数的低半字节与A的低半字节互换,即(30H)=#60H,(A)=#27H
SWAP是累加器的高半字节和低半字节互换

(A)=03H