文章目录
- 1.直接在源代码demo中修改
- 2. 如何修改呢?
- 3. 修改 graph
- 4. 总结
https://github.com/DeployAI/nndeploy
https://nndeploy-zh.readthedocs.io/zh/latest/introduction/index.html
通过以上2个官方链接对nndeploy基本的使用方法应该有所了解了。
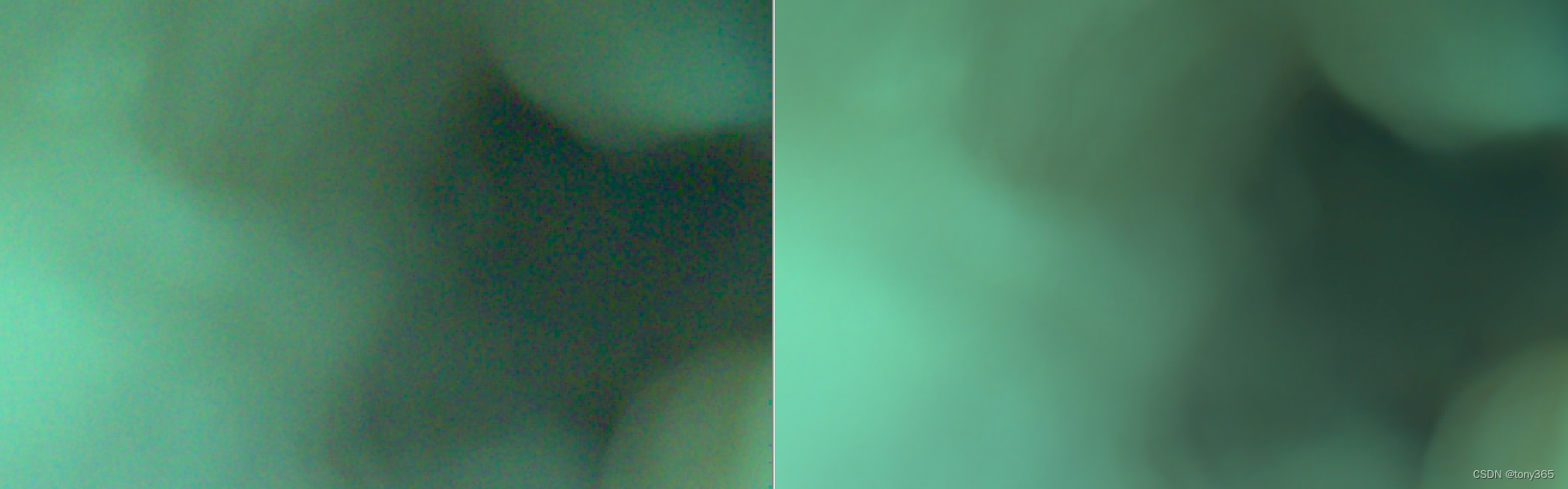
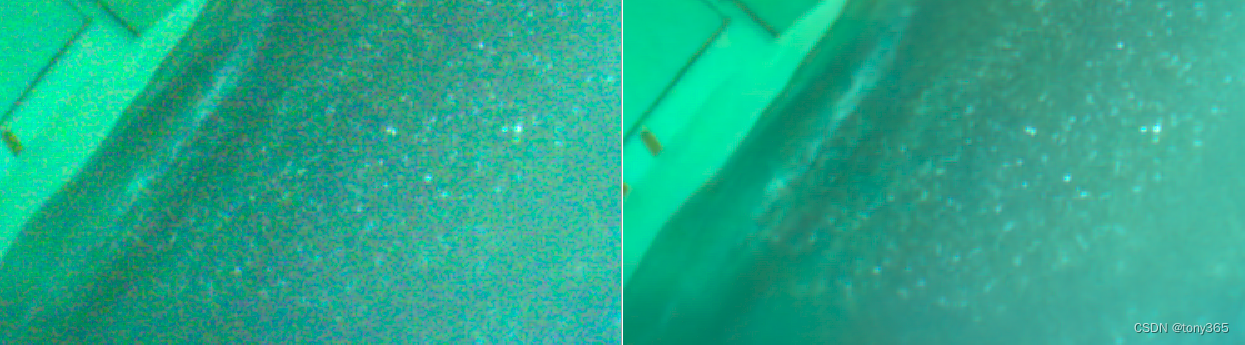
下面就是利用nndeploy跑一个图像降噪的unet类型网络。
为了方便,直接修改源码然后重新编译了一个demo。大家理解就好,可以自己整理完善,创建新的demo, 因为我这里没有创建新的deno,而是直接修改 yolov5的相关代码。
1.直接在源代码demo中修改
源代码如果你想运行yolo5是一个目标检测模型,可以通过下面的命令:
onnxruntime:115ms
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeOnnxRuntime --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeOnnx --is_path --model_value …/…/yolov5s.onnx --input_type kInputTypeImage --input_path …/…/sample.jpg --output_path …/…/sample_output.jpg
openvino:57ms
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeOpenVino --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeOnnx --is_path --model_value …/…/yolov5s.onnx --input_type kInputTypeImage --input_path …/…/sample.jpg --output_path …/…/sample_output.jpg
mnn:78ms
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeMnn --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeMnn --is_path --model_value …/…/yolov5s.mnn --input_type kInputTypeImage --input_path …/…/sample.jpg --output_path …/…/sample_output.jpg
tensorrt: 17ms
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeTensorRt --device_type kDeviceTypeCodeCuda:0 --model_type kModelTypeOnnx --is_path --model_value …/…/yolov5s.onnx --input_type kInputTypeImage --input_path …/…/sample.jpg --output_path …/…/sample_output.jpg
然后我直接修改源码然后编译后通过下面的命令 可以运行 unet denoise model
tensorrt
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeTensorRt --device_type kDeviceTypeCodeCuda:0 --model_type kModelTypeOnnx --is_path --model_value /home/tony/nndeploy/mymodel/scripts/unet8.opt.onnx --input_type kInputTypeImage --input_path …/…/1007_01_06_40_000101.png --output_path …/…/sample_output.jpg
onnxruntime
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeOnnxRuntime --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeOnnx --is_path --model_value /home/tony/nndeploy/mymodel/scripts/unet8.opt.onnx --input_type kInputTypeImage --input_path …/…/1007_01_06_40_000101.png --output_path …/…/sample_output.jpg
openvino:
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeOpenVino --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeOnnx --is_path --model_value /home/tony/nndeploy/mymodel/scripts/unet8.opt.onnx --input_type kInputTypeImage --input_path …/…/1007_01_06_40_000101.png --output_path …/…/sample_output.jpg
MNN:
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeMnn --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeMnn --is_path --model_value /home/tony/nndeploy/mymodel/scripts/unet8.opt.mnn --input_type kInputTypeImage --input_path …/…/1007_01_06_40_000101.png --output_path …/…/sample_output.jpg
TNN:
./install/lib/demo_nndeploy_detect --name NNDEPLOY_YOLOV5 --inference_type kInferenceTypeTnn --device_type kDeviceTypeCodeX86:0 --model_type kModelTypeTnn --is_path --model_value /home/tony/nndeploy/mymodel/scripts/unet8.sim.tnnproto,/home/tony/nndeploy/mymodel/scripts/unet8.sim.tnnmodel --input_type kInputTypeImage --input_path …/…/1007_01_06_40_000101.png --output_path …/…/sample_output.jpg
2. 如何修改呢?
首先明白我的模型,输入输出都是 c,h,w, 0-1, float32
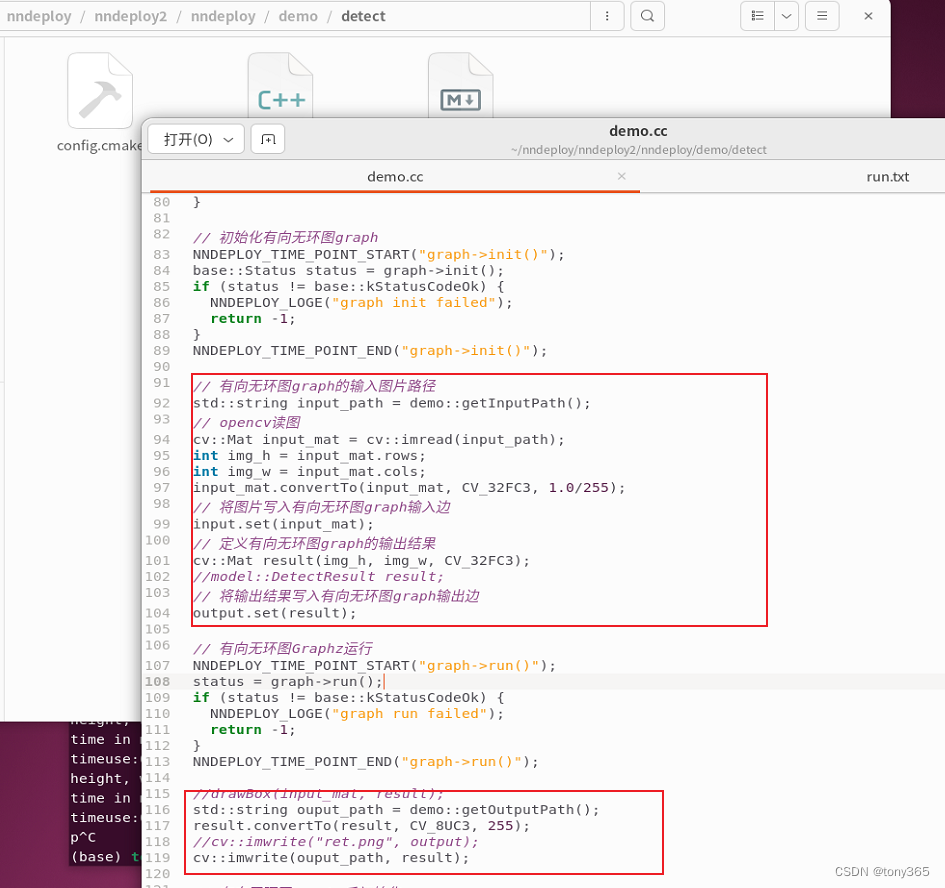
首先修改demo.cc:
设置了graph的 input和output :都是 h, w, c , 0-1, float32
输入是 h,w,c float32
输出也是h,w,c float32
一个完整的graph包括:
- 前处理需要完成 从 h,w,c foat32 -> c, h, w float32
2.然后infer跑model;:输入输出都是 c,h,w, 0-1, float32
3.那么后处理需要完成 从 c, h, w,float32 -> h, w, c, float32
其实使用一个框架,要获取到 模型输入和输出的指针,然后可以用opencv进行前后预处理,很多框架都有自己的前后处理(我不太喜欢用,感觉不清晰有学习成本)
完整代码:
#include "flag.h"
#include "nndeploy/base/glic_stl_include.h"
#include "nndeploy/base/time_profiler.h"
#include "nndeploy/dag/node.h"
#include "nndeploy/device/device.h"
#include "nndeploy/model/detect/yolo/yolo.h"using namespace nndeploy;cv::Mat drawBox(cv::Mat &cv_mat, model::DetectResult &result) {// float w_ratio = float(cv_mat.cols) / float(640);// float h_ratio = float(cv_mat.rows) / float(640);float w_ratio = float(cv_mat.cols);float h_ratio = float(cv_mat.rows);const int CNUM = 80;cv::RNG rng(0xFFFFFFFF);cv::Scalar_<int> randColor[CNUM];for (int i = 0; i < CNUM; i++)rng.fill(randColor[i], cv::RNG::UNIFORM, 0, 256);int i = -1;for (auto bbox : result.bboxs_) {std::array<float, 4> box;box[0] = bbox.bbox_[0]; // 640.0;box[2] = bbox.bbox_[2]; // 640.0;box[1] = bbox.bbox_[1]; // 640.0;box[3] = bbox.bbox_[3]; // 640.0;box[0] *= w_ratio;box[2] *= w_ratio;box[1] *= h_ratio;box[3] *= h_ratio;int width = box[2] - box[0];int height = box[3] - box[1];int id = bbox.label_id_;NNDEPLOY_LOGE("box[0]:%f, box[1]:%f, width :%d, height :%d\n", box[0],box[1], width, height);cv::Point p = cv::Point(box[0], box[1]);cv::Rect rect = cv::Rect(box[0], box[1], width, height);cv::rectangle(cv_mat, rect, randColor[id]);std::string text = " ID:" + std::to_string(id);cv::putText(cv_mat, text, p, cv::FONT_HERSHEY_PLAIN, 1, randColor[id]);}return cv_mat;
}//
int main(int argc, char *argv[]) {gflags::ParseCommandLineNonHelpFlags(&argc, &argv, true);if (demo::FLAGS_usage) {demo::showUsage();return -1;}// 检测模型的有向无环图graph名称,例如:// NNDEPLOY_YOLOV5/NNDEPLOY_YOLOV6/NNDEPLOY_YOLOV8std::string name = demo::getName();// 推理后端类型,例如:// kInferenceTypeOpenVino / kInferenceTypeTensorRt / kInferenceTypeOnnxRuntimebase::InferenceType inference_type = demo::getInferenceType();// 推理设备类型,例如:// kDeviceTypeCodeX86:0/kDeviceTypeCodeCuda:0/...base::DeviceType device_type = demo::getDeviceType();// 模型类型,例如:// kModelTypeOnnx/kModelTypeMnn/...base::ModelType model_type = demo::getModelType();// 模型是否是路径bool is_path = demo::isPath();// 模型路径或者模型字符串std::vector<std::string> model_value = demo::getModelValue();// 有向无环图graph的输入边packertdag::Edge input("detect_in");// 有向无环图graph的输出边packertdag::Edge output("detect_out");// 创建检测模型有向无环图graphdag::Graph *graph =dag::createGraph(name, inference_type, device_type, &input, &output,model_type, is_path, model_value);if (graph == nullptr) {NNDEPLOY_LOGE("graph is nullptr");return -1;}// 初始化有向无环图graphNNDEPLOY_TIME_POINT_START("graph->init()");base::Status status = graph->init();if (status != base::kStatusCodeOk) {NNDEPLOY_LOGE("graph init failed");return -1;}NNDEPLOY_TIME_POINT_END("graph->init()");// 有向无环图graph的输入图片路径std::string input_path = demo::getInputPath();// opencv读图cv::Mat input_mat = cv::imread(input_path);int img_h = input_mat.rows;int img_w = input_mat.cols;input_mat.convertTo(input_mat, CV_32FC3, 1.0/255);// 将图片写入有向无环图graph输入边input.set(input_mat);// 定义有向无环图graph的输出结果cv::Mat result(img_h, img_w, CV_32FC3);//model::DetectResult result;// 将输出结果写入有向无环图graph输出边output.set(result);// 有向无环图Graphz运行NNDEPLOY_TIME_POINT_START("graph->run()");status = graph->run();if (status != base::kStatusCodeOk) {NNDEPLOY_LOGE("graph run failed");return -1;}NNDEPLOY_TIME_POINT_END("graph->run()");//drawBox(input_mat, result);std::string ouput_path = demo::getOutputPath();result.convertTo(result, CV_8UC3, 255);//cv::imwrite("ret.png", output);cv::imwrite(ouput_path, result);// 有向无环图graphz反初始化NNDEPLOY_TIME_POINT_START("graph->deinit()");status = graph->deinit();if (status != base::kStatusCodeOk) {NNDEPLOY_LOGE("graph deinit failed");return -1;}NNDEPLOY_TIME_POINT_END("graph->deinit()");NNDEPLOY_TIME_PROFILER_PRINT("detetct time profiler");// 有向无环图graphz销毁delete graph;NNDEPLOY_LOGE("hello world!\n");return 0;
}
3. 修改 graph
一个完整的graph包括:
- 前处理需要完成 从 h,w,c foat32 -> c, h, w float32
2.然后infer跑model;:输入输出都是 c,h,w, 0-1, float32
3.那么后处理需要完成 从 c, h, w,float32 -> h, w, c, float32
dag::Graph* createYoloV5Graph(const std::string& name,
base::InferenceType inference_type,
base::DeviceType device_type, dag::Edge* input,
dag::Edge* output, base::ModelType model_type,
bool is_path,
std::vectorstd::string model_value)
中修改前后处理函数即可。
前处理,infer , 后处理是一个 graph , 也就是demo中完整的图。
demo中的input和output是 完整的图的输入输出。
然后前处理,infer, 后处理 内部也有自己的input和output,不要搞混淆了。
比如模型infer输入,输出都是c,h,w, float32的结果,
后处理 input是 c,h,w float32 的数据,output转换为 h,w,c float32的数据(对应上面的cv::Mat result(img_h, img_w, CV_32FC3);)
那么我们修改 后处理函数为
base::Status YoloPostProcess::runV5V6() {// data, img_data 就是输入和输出的指针,将图像从c,h,w转为h,w,c device::Tensor* tensor = inputs_[0]->getTensor();float* data = (float*)tensor->getPtr();int batch = tensor->getBatch();int channel = tensor->getChannel();int height = tensor->getHeight();int width = tensor->getWidth();
NNDEPLOY_LOGE("batch:%d, channel:%d, height:%d, width:%d. (%f,%f,%f))\n", batch, channel, height, width, data[0], data[1], data[2]);
cv::Mat* dst = outputs_[0]->getCvMat();
NNDEPLOY_LOGE("mat channel:%d, height:%d, width:%d.\n", dst->channels(), dst->rows, dst->cols);auto* img_data = (float*)dst->data;for (int h = 0; h < height; h++){for (int w = 0; w < width; w++){for (int c = 0; c < 3; c++){int in_index = h * width * 3 + w * 3 + c;int out_index = c * width * height + h * width + w;// if (w < 10)// if(h < 10)// printf("%.2f,", data[out_index]);img_data[in_index] = data[out_index];}}// if(h < 10)// printf("\n");}return base::kStatusCodeOk;
}
前处理也是同样的道理。
4. 总结
前后处理都完成后,进重新编译,得到的./install/lib/demo_nndeploy_detect 就是处理 UNET类型的输入输出了, 不能处理目标检测网络了,目标检测的输入是 uint8 image, 输出的是一系列目标框,对应的前后处理都是不同的。
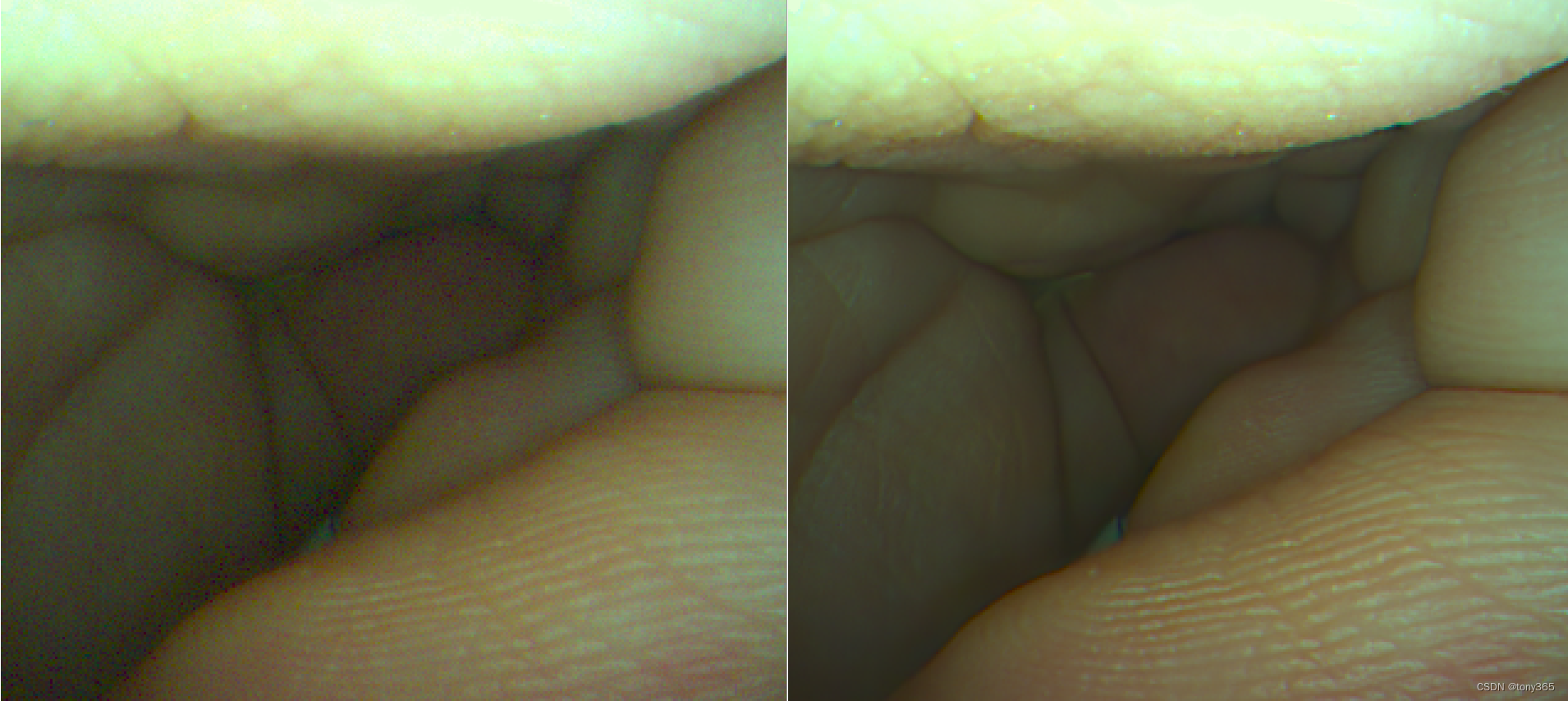
1080P的图像, 在我训练的降噪model(未量化)上 基于openvino在 amd的Ryzen Embedded上可以跑到30-60ms。
降噪前后对比:降噪最重要是不损失细节且可以提升清晰度。