GNSS介绍
- 1. GNSS概述
- 2 GNSS工原理
- 3 GNSS的关键技术
- 3.1 RTK技术
- 3.2 惯性导航技术
- 4 GPS导航电文的格式
- 4.1 第一数据块
- 4.2 第二数据块
- 4.3 第三数据块
- 5 NMEA语句
- 5.1 GGA
- 5.2 GSA
- 5.3 GSV
- 5.4 RMC
- 5.5 GLL
- 5.6 VTG
- 6 各导航系统不同频段的工作频率
- 7 LTE,GNSS,WIFISCAN共存业务流程
1. GNSS概述
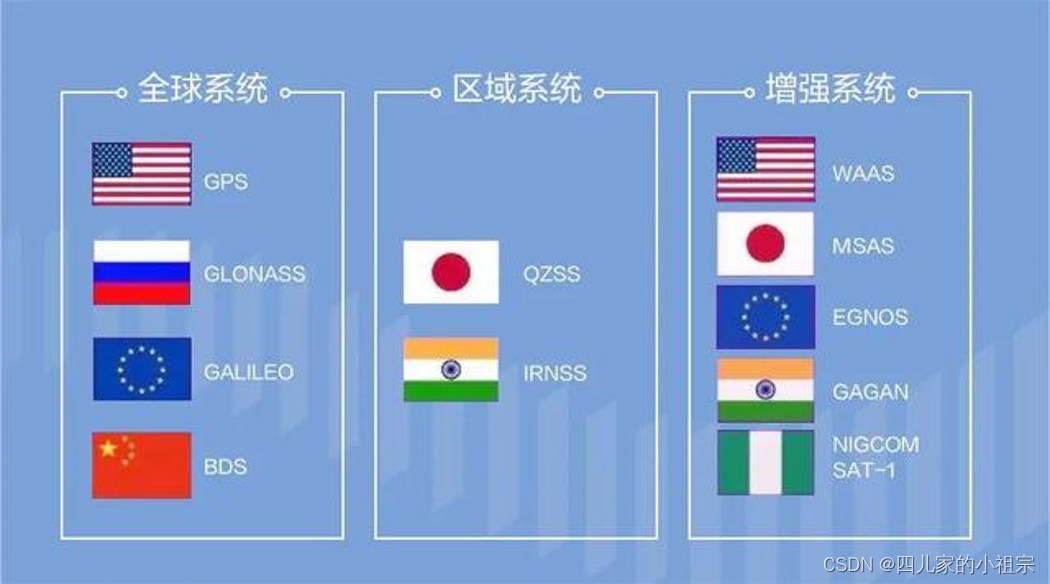
GNSS(Global Navigation Satellite System)即全球导航卫星系统,它泛指所有的卫星导航系统,包括全球的、区域的和增强的,如美国的GPS、俄罗斯的GLONASS、中国的Beidou、欧盟的Galileo等。
GNSS的学术接释为:全球导航卫星系统,是能在地球表面或近地空间的任何地点,为用户提供全天候的三维坐标、速度以及时间信息的空基无线电导航定位系统。
GNSS的作用是定位和导航,还有一个授时功能。
也就是说,卫星定位系统有多个,统称为GNSS,而我们平时所说的GPS只是GNSS中的一种,是目前最成熟、覆盖面最广、定位精度最高的一种卫星定位系统,我们日常所用的手机等设备主要靠GPS来定位的。
2 GNSS工原理
三维坐标、速度、时间信息,是GNSS的必备功能。这三个信息,我们通常称之为PVT(Position Velocity and Time)。
GNSS通过以下方法来帮助用户获取PVT;
我们把整个空间看成一个坐标系,可以画一个立方体。立方体的两个对角,分别是用户和卫星,如下:
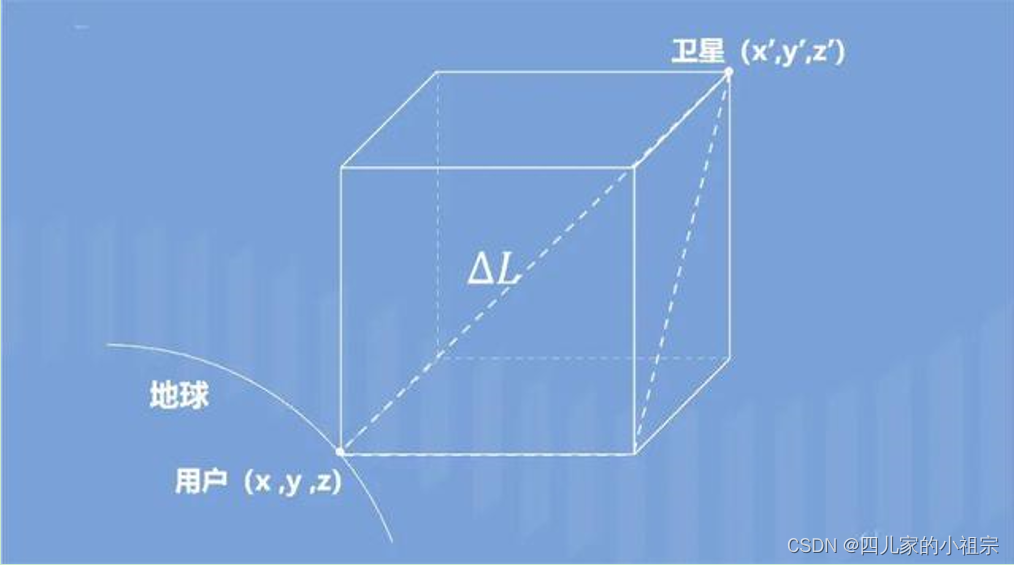
根据立体几何的知识,我们可以知道,卫星和用户之间的距离△L(这个距离也被称为“伪距”),是:

卫星的坐标是(x’,y’,z’),这是已知的。用户的坐标是(x,y,z),这是未知的。
与此同时,卫星可以给用户终端发信号,信号的传输速度基本上几乎等同于光速c。而卫星上面有精度极高的原子钟,所以知道自己的时间是t。假设用户终端的时间是t’,那么,卫星和用户之间的距离△L,又可以通过下面这个公式算出:

两个公式一合并,就变成了:

一个公式里有4个未知数(x,y,z,t),需要四个四元方程组;这就是为什么,一个用户终端要想解算出自己的准确位置,必须要有至少4颗卫星。
3 GNSS的关键技术
衡量一个GNSS系统是否足够优秀,主要看它的精度、速度和灵敏度。这个速度,主要是指从启动定位设备到首次正常定位所需的时间,也称为TTFF(Time to First Fix)。

影响GNSS定位精度的主要原因,是误差。误差既来自系统的内部,也来自外部。例如穿透电离层和对流层时产生的误差,还有卫星高速移动产生的多普勒效应引起的误差,以及多径效应误差、通道误差、卫星钟误差、星历误差、内部噪声误差等等。
这些误差,有些是可以完全消除的,也有些是无法消除或只能部分消除的。消除水平的高低,直接决定了系统的准确性和可靠性。
为了更好地消除误差、提高反应速度,GNSS会引入一些天基或陆基的辅助手段。结合辅助手段的GNSS,也被称为A-GNSS。A就是Assisted,“辅助”的意思。
现在比较常用的,是通过陆基的移动通信网络,传送增强改正数据,提供辅助信息,加强和加快卫星导航信号的搜索跟踪性能和速度,缩短定位时间,提高定位精度。
除了A-GNSS之外,GNSS还引入了一些关键技术,帮助提升系统性能。
3.1 RTK技术
RTK(Real-time kinematic),称为实时动态差分法,又称为载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,包括传统RTK和网络RTK。
传统RTK模式,只有一个基准站。网络RTK模式,有多个基准站。
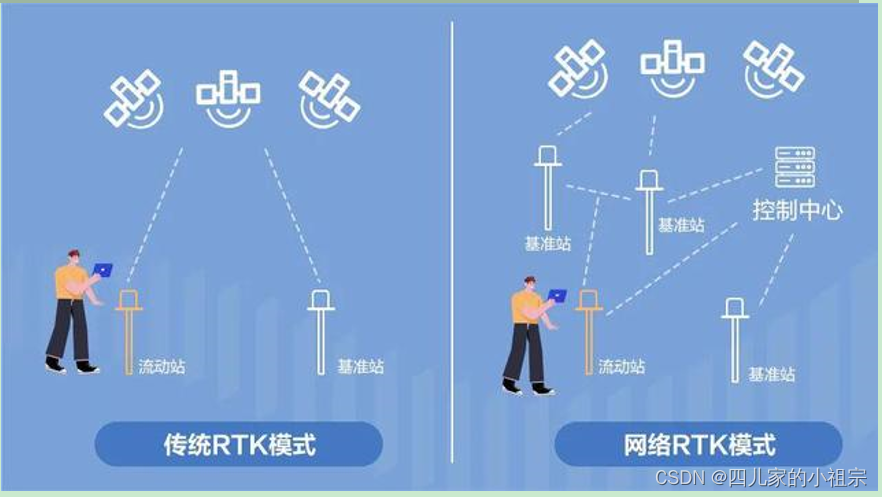
以网络RTK为例,多个基准站会采集监测数据发给控制中心,控制中心针对数据进行粗差剔除后,再进行解算,并最终将改正信息发给用户。
网络RTK的覆盖范围很快,可以距离用户上百公里。而且,网络RTK拥有更高的精度和稳定性。
3.2 惯性导航技术
GNSS卫星定位虽然方便,但容易受客观条件的影响。例如隧道、森林等路段,GNSS信号容易中断。此时,就需要临时采用其它的辅助手段。
航位推算(DR,Dead Reckoning),就是一种自主式的惯性导航技术。通过采用加速度传感器和陀螺仪传感器,结合一些专用算法,它可以根据用户终端(例如车辆)的初始位置信息以及传感器获得的信息,推算出用户终端在盲区位置的高精度导航数据。
DR和GNSS有很强的互补性,一方面DR可以帮助补盲,另一方面GNSS也能对DR进行实时纠偏,帮助DR推测出更准确的位置。
4 GPS导航电文的格式
卫星将导航电文以子帧的结构形式编排成数据流D(t)。每颗卫星一帧接着一帧地发送导航电文,而在发送每帧电文时,卫星又以一子帧接着一子帧的形式进行。
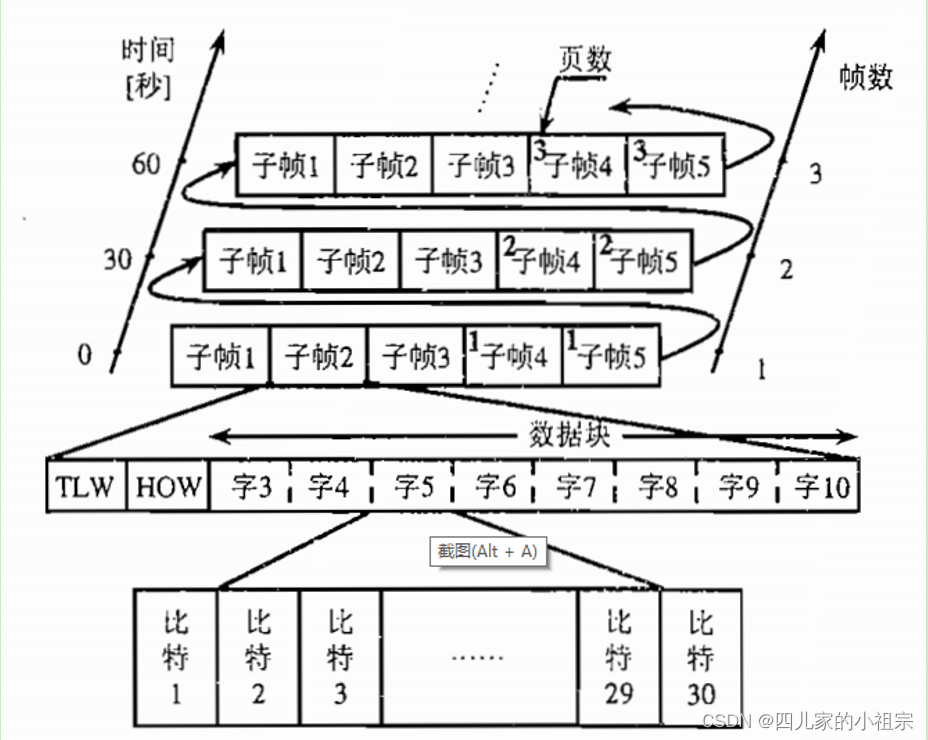
每帧导航电文长1500比特,共计30s,依次由5个子帧组成。每个子帧长300比特,共计6s,依次由10个字组成。每个字长30比特,其最高位比特先被发送,而每一子帧中的每一字又均以6比特的奇偶校验码结束。每一比特长20ms;
每一子帧的前两个字分别为遥测字(TLW)与交接字(HOW),后八个字(即第3至第10字)则组成数据块。不同子帧内的数据块侧重不同方面的导航信息,其中第1子帧中的数据块通常称为第一数据块,第2子帧和第3子帧中的数据块合称为第二数据块,而剩下的第4子帧和第5子帧中的数据块则合称为第三数据块。
GPS对第三数据块采用了分页的结构,即一帧中的第4子帧和第5子帧为一页,然后在下一帧中的第4子帧和第5子帧继续发送下一页,而第三数据块的内容共占25页。因为一帧电文长30s,所以发送一套完成的导航电文总共需要花750s(即12.5min)的时间,然后整个导航电文的内容每12.5min重复一次。
4.1 第一数据块
第一数据快包含第1子帧中的第3字至第10字,它又常称为时钟数据块。由一颗卫星播发的时钟数据块体提供该卫星的时钟校正参数和健康状态等如下内容;
- 星期数(WN):星期数来自Z计数器的高10位,指代当前的GPS星期;
- 用户测距精度(URA):用户测距精度时对所有由GPS地面监控部分和空间星座部分引起的测距误差大小的一个统计值,它时通过导航电文中的一个由4比特表示的用户测距精度因子N而提供给非特许用户的;
- 卫星健康状况:若共计6比特的卫星健康状况的最高位是0,则表示导航电文全部正确。若它的最高位是1,则表示导航电文出错;
- 群波延时校正值,双频接收机则无需此项校正;
- 时钟校正参数;
- 时钟数据期号;
4.2 第二数据块
卫星信号的第2子帧和第3子帧数据块一起组成第二数据块,它提供该卫星自身的星历参数。
星历的原意是一张用来精确描述卫星在各个时刻的空间位置和运行速度的大表格。为了减少播发的数据量,GPS用开普勒方程来描述卫星的运行轨道,并通过最小二乘法逼近来求解方程中的各个系数。
一套星历参数的有效期一般是以参考时间t位中心的4小时之内,而超过此有效时段的星历经常被认为是过期且无效的。
卫星播发的第1子帧,第2子帧和第3子帧的内容通常每两小时更新一次,并且通常发生在整小时交界处。当更新完毕后,这三个子帧的数据块内容应当跟下一帧的这三个子帧的数据块内容保持一致。正是由于卫星在这三个子帧中重复播发相同的时钟校正和卫星星历参数,因而接收机在平均30s的时间内必然有机会从实时的卫星信号中完整地获取这三个子帧的数据内容;

4.3 第三数据块
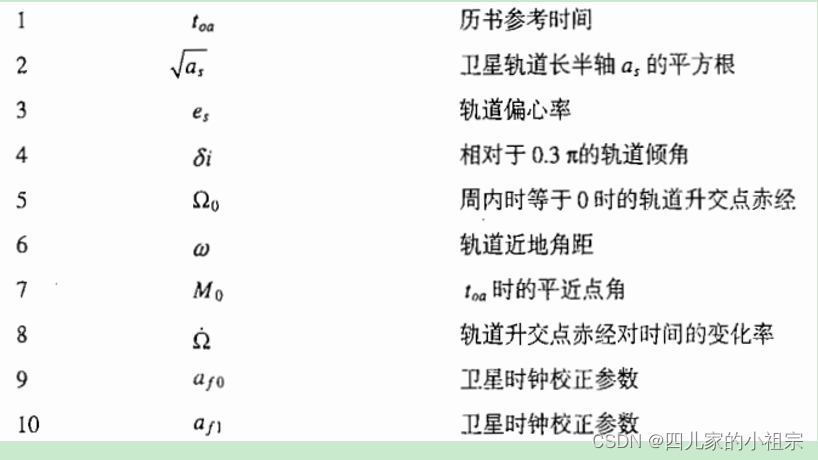
第三数据块由第4子帧和第5子帧的数据块组成。每颗卫星播发的第三数据块主要提供所有卫星的历书参数、电离层延时校正参数、GPS时间与UTC之间的关系以及卫星健康状况等数据信息。与前两个数据块不同,第三数据块的内容并不是接收机在实现定位前所急需获得的。
跟星历一样,历书的原意也是一张给出在不同时刻卫星位置的很大的表格,然而因为历书的精度比星历低,所以它又称为概略星历。
5 NMEA语句
NMEA-0183
GGA:时间、位置、定位类型
GLL:经度、纬度、UTC时间
GSA:GPS接收机操作模式,定位使用的卫星,DOP值
GSV:可见GPS卫星信息、仰角、方位角、信噪比(SNR)
RMC:时间、日期、位置、速度
VTG:地面速度信息 MSS:信号强度等
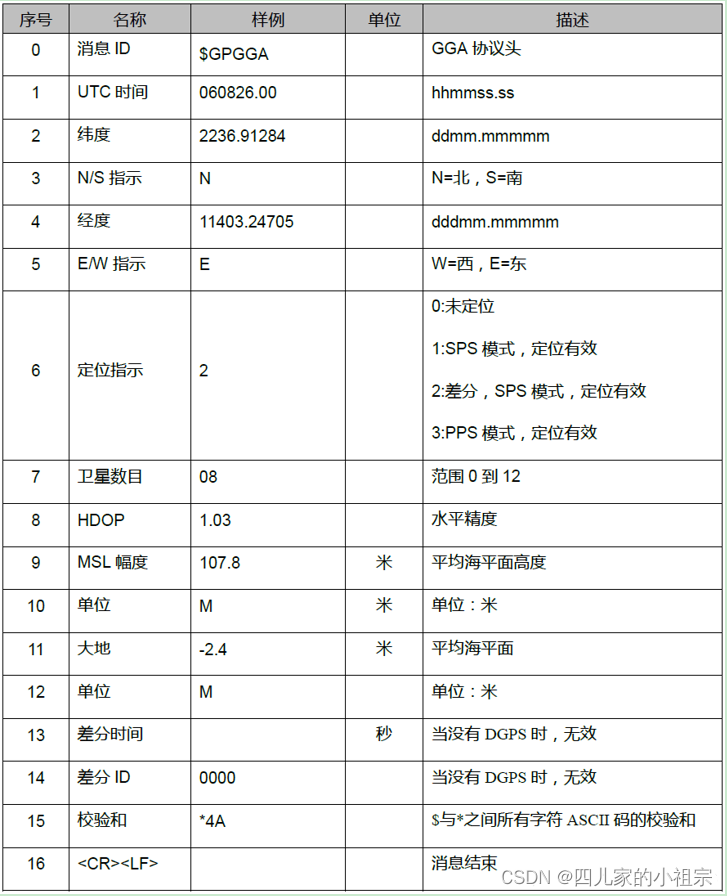
5.1 GGA
GGA:Global Positioning System Fix Data. Time, Position and fix related data
for a GPS receiver
$GPGGA,060826.00,2236.91284,N,11403.24705,E,2,08,1.03,107.8,M,-2.4,M,0000*4A
5.2 GSA
GSA:GPS DOP and active satellites
$GPGSA,A,3,24,22,14,12,15,25,18,42,2.20,1.03,1.95*01

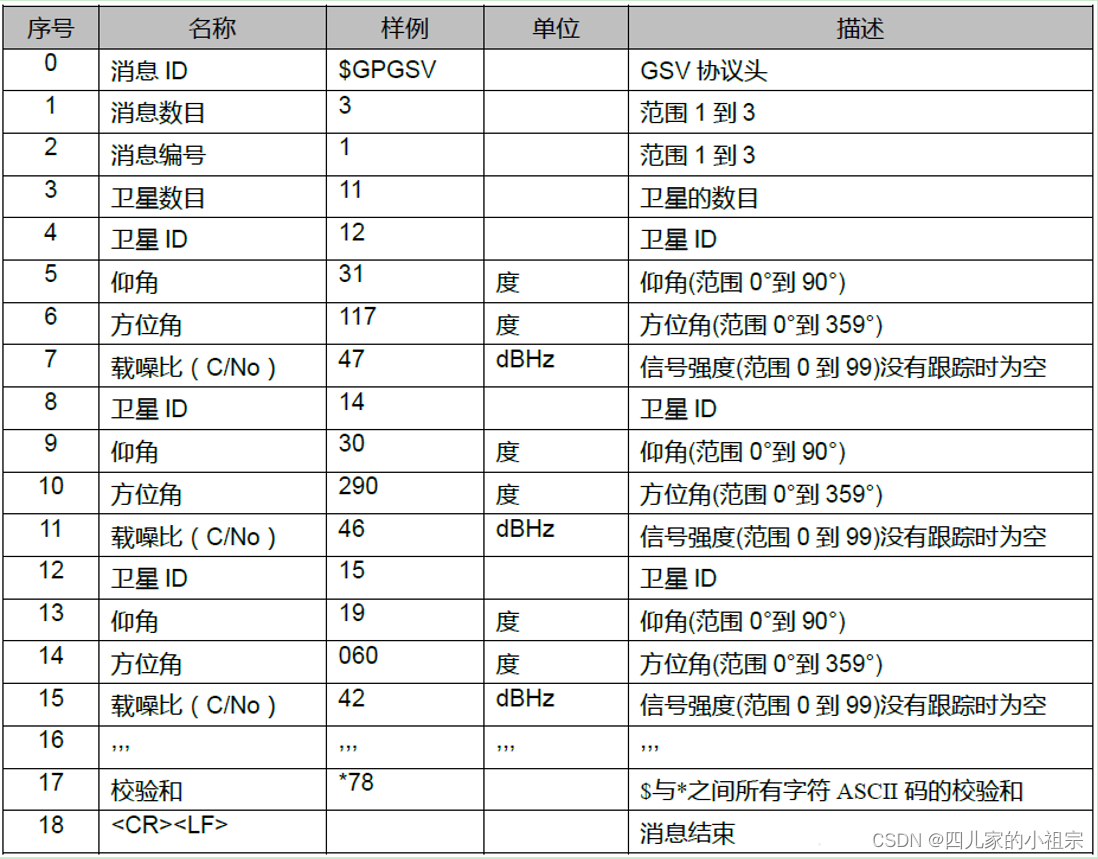
5.3 GSV
GSV:Satellites in view
$GPGSV,3,1,11,12,31,117,47,14,30,290,46,15,19,060,42,18,70,010,4578 $GPGSV,3,2,11,21,47,207,22,40,326,43,24,44,036,43,25,24,159,4270 $GPGSV,3,3,11,31,03,218,42,51,128,35,50,46,122,45*4E
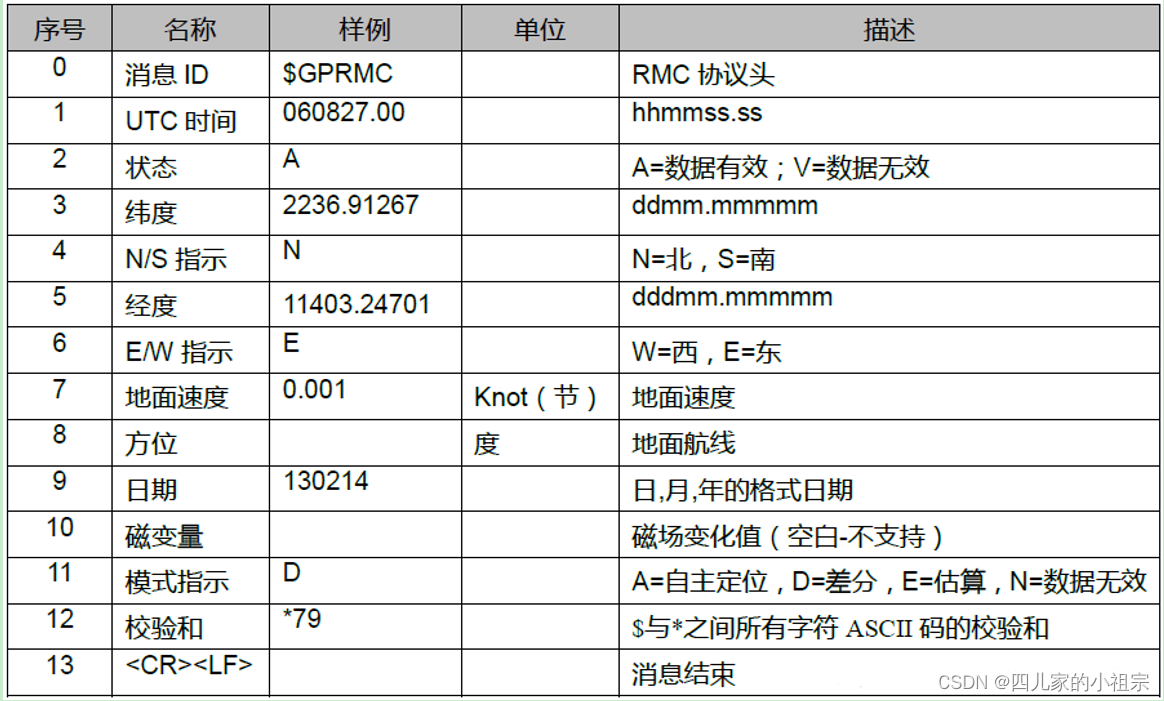
5.4 RMC
RMC:Recommended Minimum Navigation Information
$GPRMC,060827.00,A,2236.91267,N,11403.24701,E,0.001,130214,D*79
5.5 GLL
GLL:Geographic Position – Latitude/Longitude
$GPGLL,2236.91284,N,11403.24705,E,060826.00,A,D*66

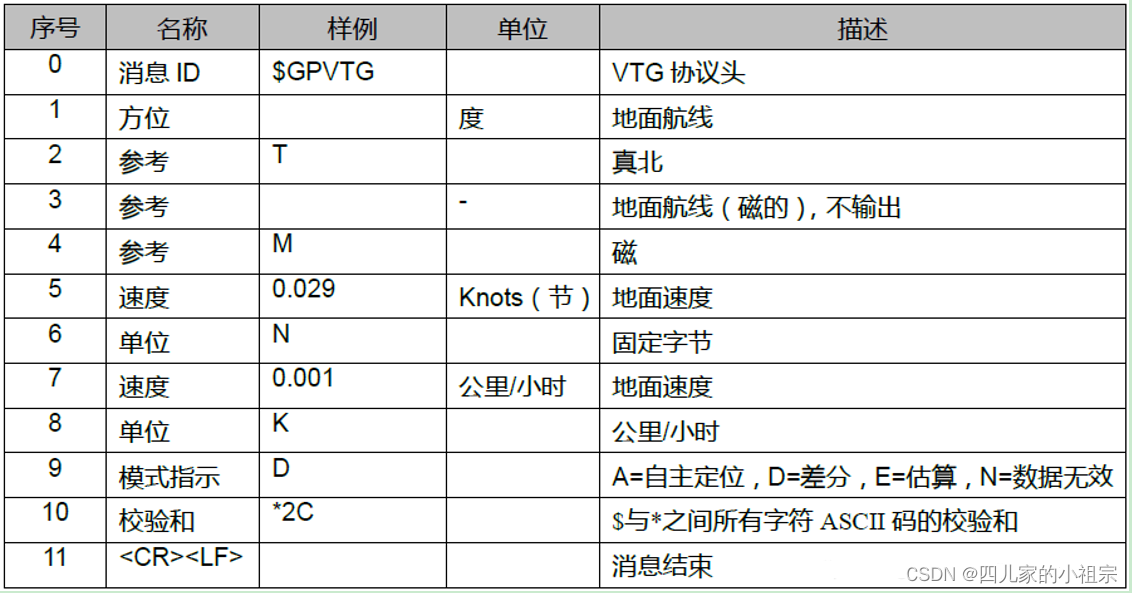
5.6 VTG
VTG:Track Made Good and Ground Speed
$GPVTG,T,M,0.029,N,0.001,K,D*2C
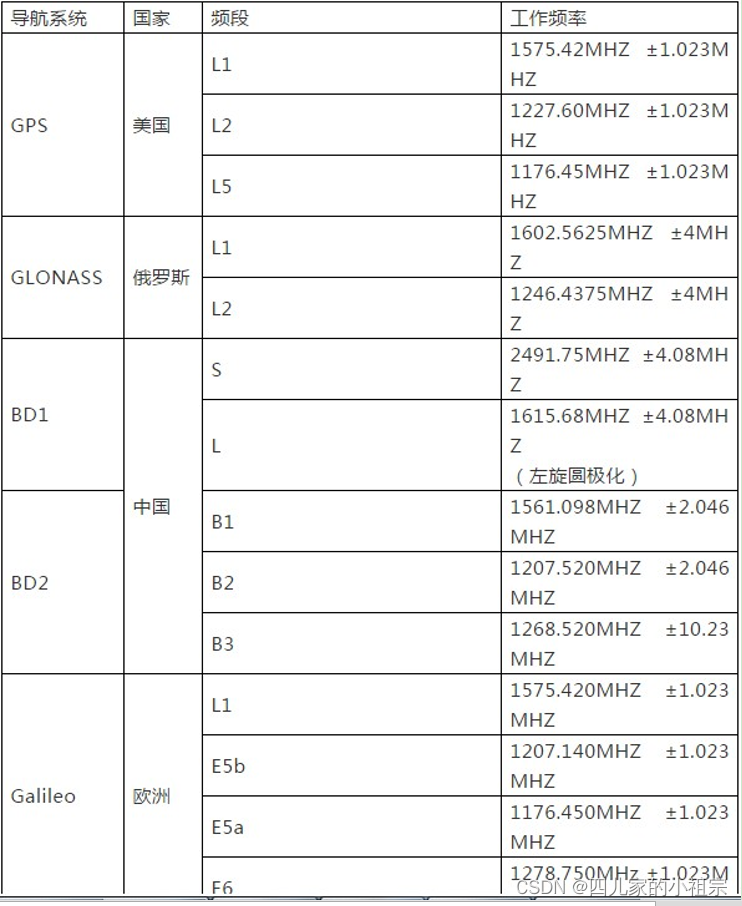
6 各导航系统不同频段的工作频率
7 LTE,GNSS,WIFISCAN共存业务流程
在LTE和 GNSS都没有工作的状态下,使用 Wi-Fi Scan 功能能够正常扫描到无线网络信息。
一般 1~5s 可完成扫描,扫描完自动关闭。正常的扫描超时时间为 30s。
在 Wi-Fi Scan 功能使用异常时, 可能存在以下问题。
-
LTE 和 GNSS 未工作时, Wi-Fi Scan 功能异常。
周围没有无线网络信息时可能无法扫描到 APNode, Wi-Fi Scan 将在 30s 后提示“超时”。 此时需要主动发送关闭 Wi-Fi Scan 的 AT 命令。 -
LTE 业务正在进行的过程中, 无法启用 Wi-Fi Scan 功能。
很多时候 LTE、 GNSS 和 Wi-Fi Scan 共用 RF 资源, 而 LTE 的优先级高于 Wi-Fi Scan,所以Wi-Fi Scan 会返回“error”,即执行命令失败。 -
Wi-Fi Scan 正在进行的过程中出现异常。
Wi-Fi Scan 功能正在进行的过程中, LTE 有业务需要进行时, LTE 会中断 Wi-Fi Scan 以完成自己的业务。 -
GNSS 业务正在进行的过程中, 无法启用 Wi-Fi Scan 功能。
Wi-Fi Scan 用来辅助定位,当 GNSS 定位正在进行时不需要辅助定位,所以 GNSS 和 Wi-Fi Scan 存在冲突控制, 二者不能共存。