文章目录
- 2023
- Large-scale Autonomous Flight with Real-time Semantic SLAM under Dense Forest Canopy
2023
Large-scale Autonomous Flight with Real-time Semantic SLAM under Dense Forest Canopy
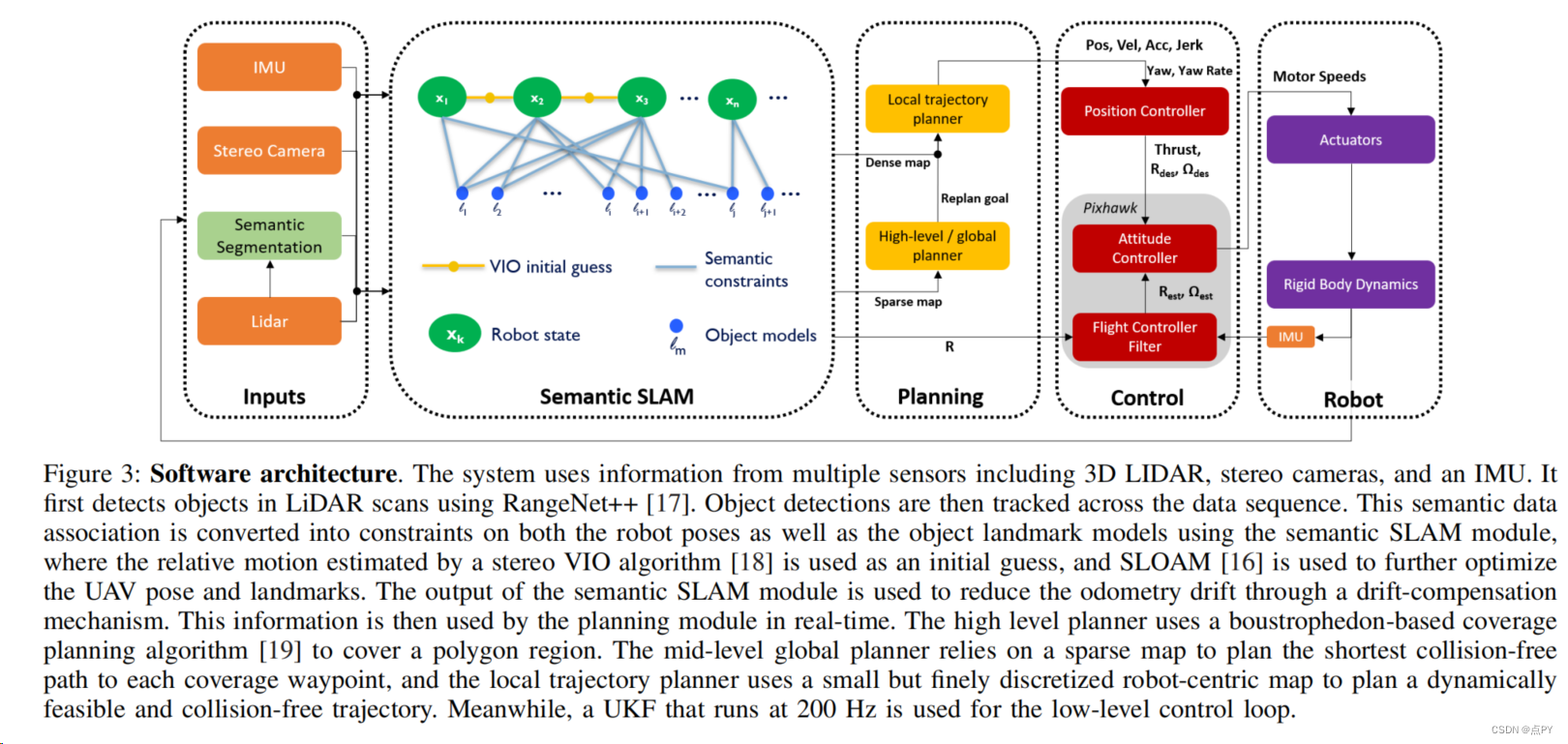
摘要:语义地图使用一组语义上有意义的对象来表示环境。这种表示具有存储效率、更模糊、信息更丰富,从而促进了在高度非结构化、被gps拒绝的环境中大规模自主和获取可操作信息。在这封信中,我们提出了一个集成的系统,它可以在具有挑战性的冠层下环境中执行大规模的自主飞行和实时语义映射。我们从激光雷达数据中检测和建模树干和地面平面,这些数据通过扫描相关联,并用于约束机器人的姿态和树干模型。自主导航模块利用多层规划和映射框架,并计算动态可行的轨迹,引导无人机以计算和存储高效的方式构建用户定义的感兴趣区域的语义地图。设计了一种漂移补偿机制,利用语义SLAM输出实时最小化测程漂移,同时保持规划器的最优性和控制器的稳定性。这导致无人机准确和安全地执行其任务。