FPGA模块——SPI协议(读写FLASH)
- (1)FLASH芯片 W25Q16BV
- (2)SPI协议
- (3)芯片部分命令
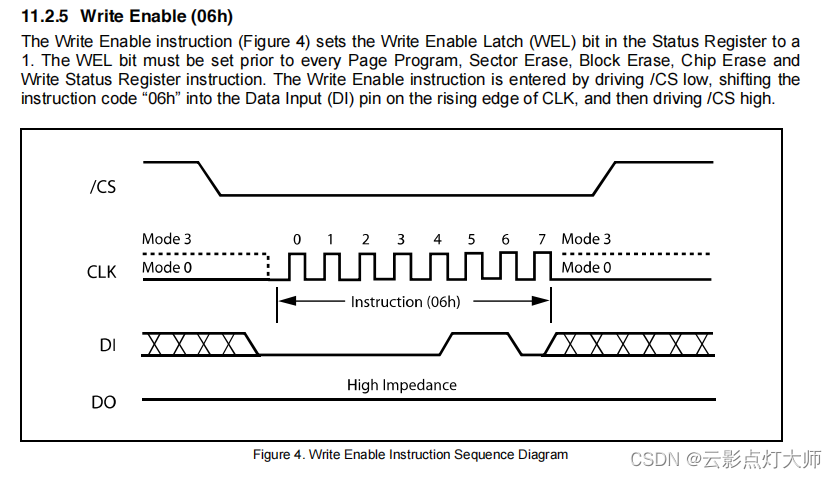
- 1.Write Enable(06h)
- 2.Chip Erase (C7h / 60h)
- 3.写指令(02h)
- 4.读指令(03h)
- (4)代码
- 1. FPGA做主机的SPI协议
- 2. SPI协议的使用
(1)FLASH芯片 W25Q16BV
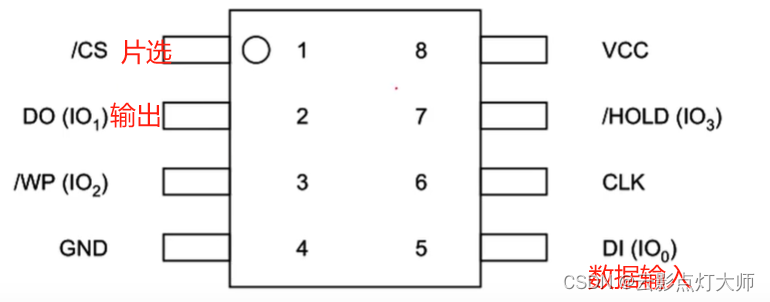
芯片引脚图:
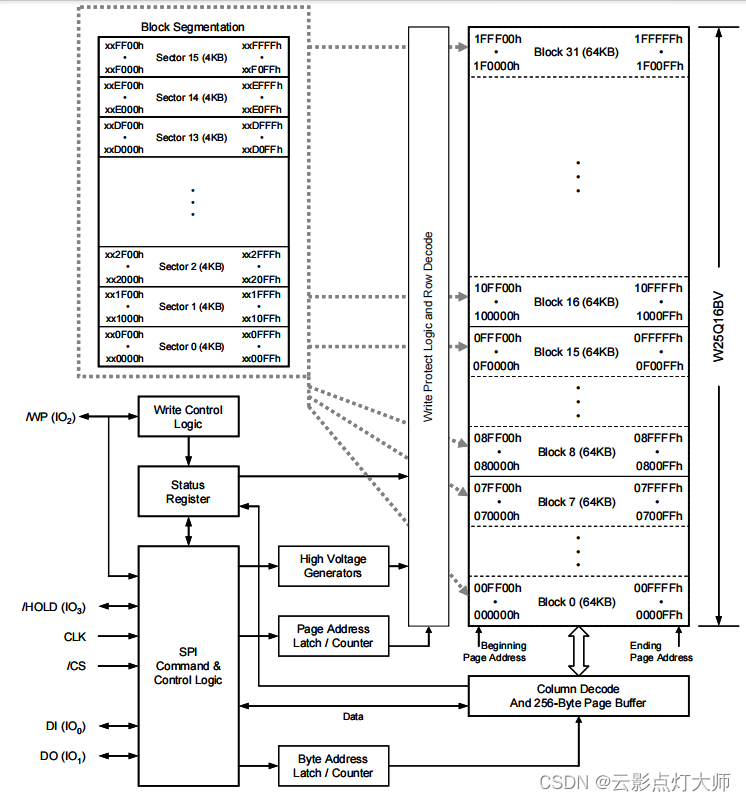
内部结构图:
存储区域总共分成了32块,每块64KB。每块又分成了16个部分,每个部分4KB。方便进行读取和局部操作。
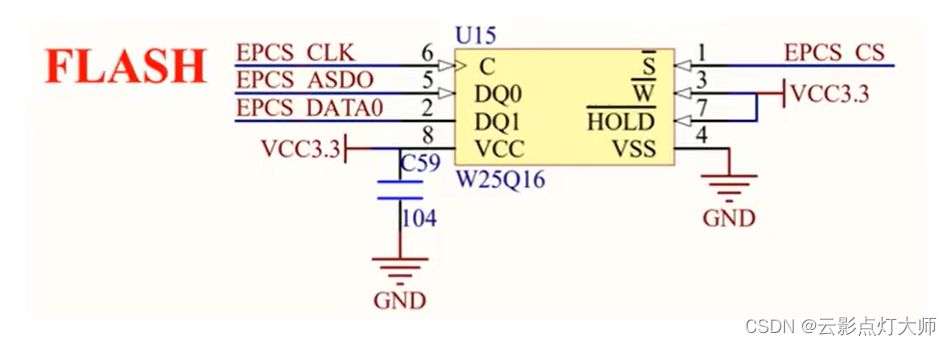
电路设计
(2)SPI协议
SPI的四种模式
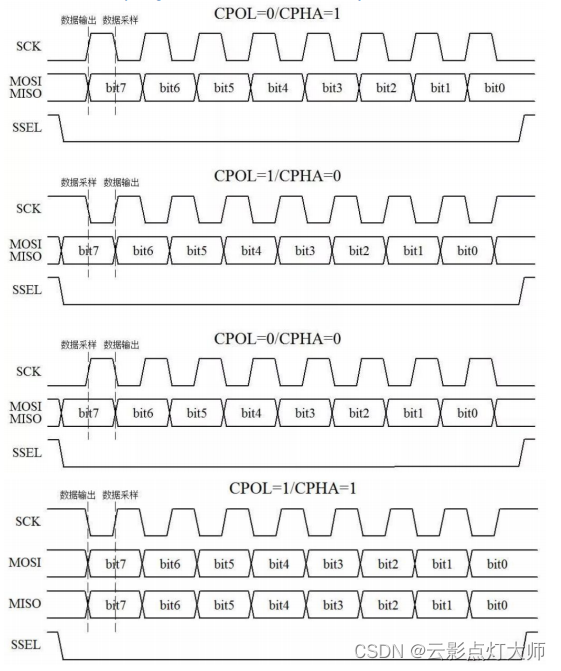
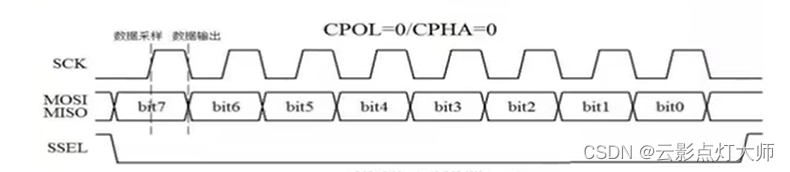
这里使用这个模式:
主机和从机在时钟上升沿放入要输出的数据,在时钟下降沿读取要输入的数据。
8个时钟后交换一个字节8位数据(高位在前)。
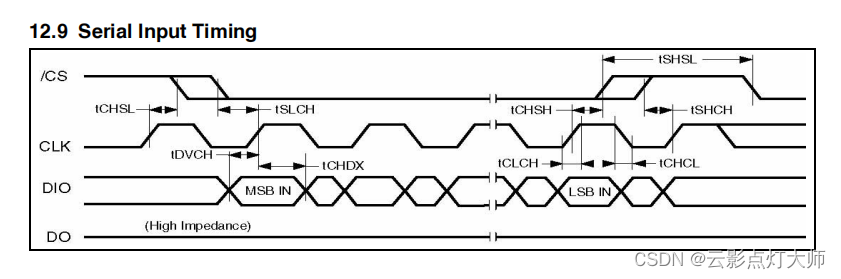
(3)芯片部分命令
有个输入时序的要求 开始时CS拉低等待(tSLCH要求最小5ns)再开始, 结束时CS拉高等待(tSHSL用100ns )再进行下一次操作。
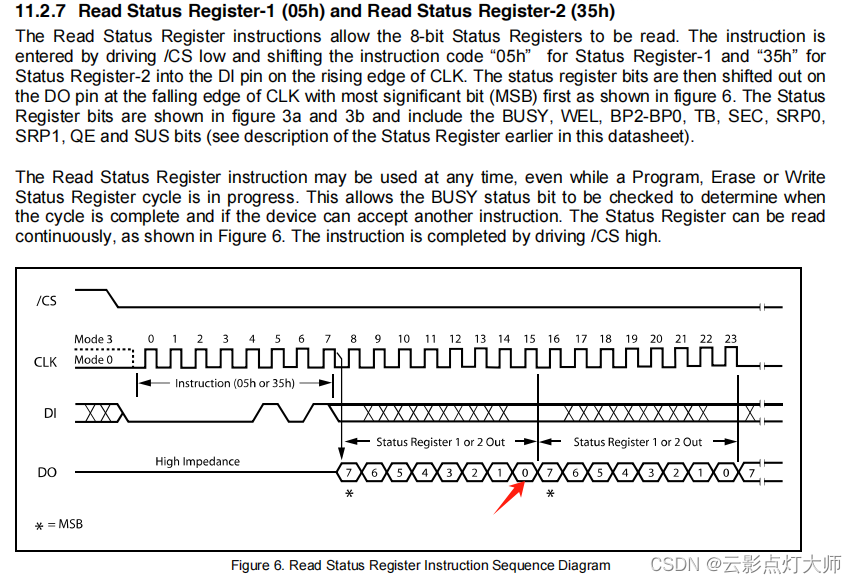
这个寄存器的第一位数据可以判断操作是否完成(BUSY位)
1.Write Enable(06h)
写使能:开始时CS拉低等待(tSLCH要求最小5ns)再开始,结束时CS拉高等待(tSHSL取100ns )再进行下一次操作。
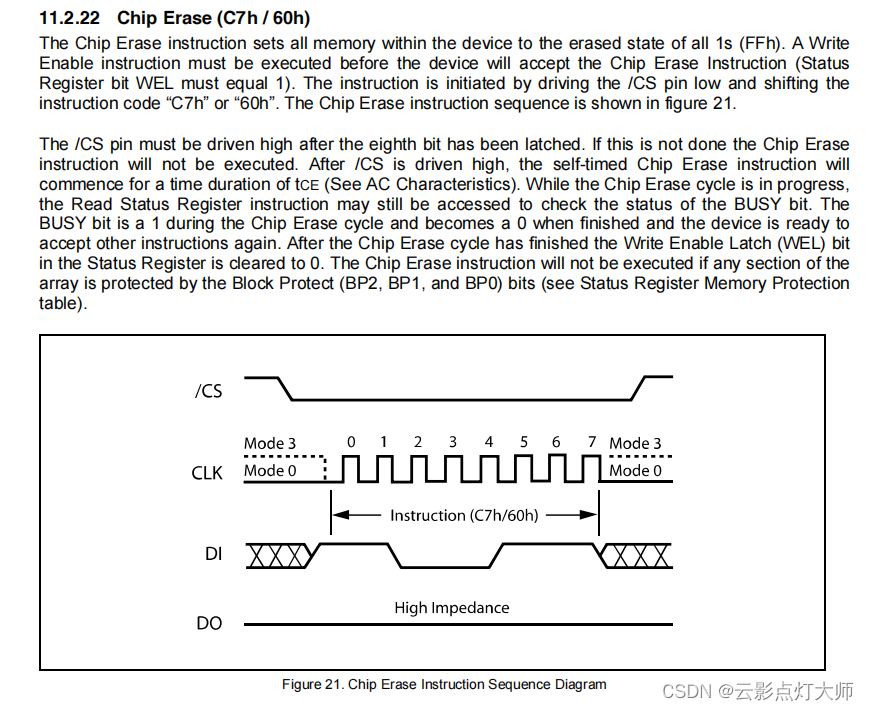
2.Chip Erase (C7h / 60h)
整片擦除,要判断操作是否完成
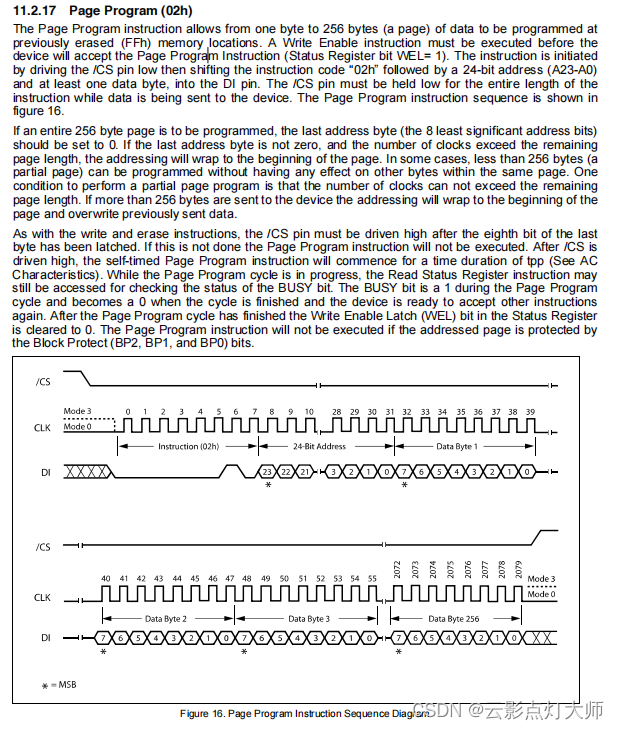
3.写指令(02h)
数据写多了会把之前的数据覆盖掉,要判断操作是否完成。
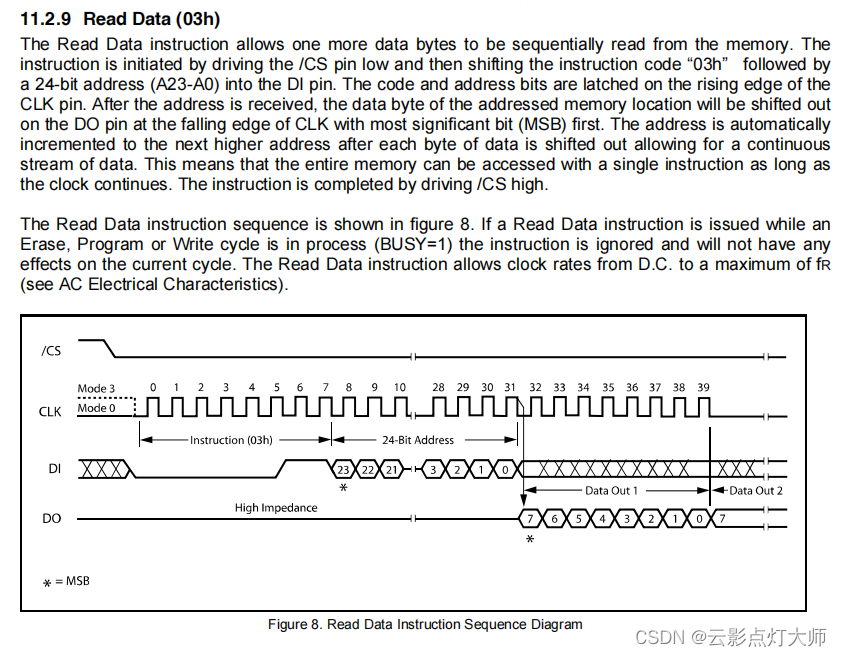
4.读指令(03h)
要判断操作是否完成
(4)代码
1. FPGA做主机的SPI协议
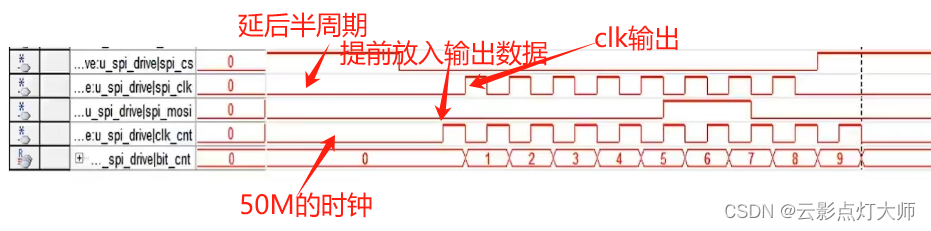
对信号进行同步和提前准备:
100m时钟和clk_cnt配合进行数据的读取和输出(clk_cnt有等于1和0的时候)
spi_clk基于100m时钟输出一个相当于clk_cnt的延时半个周期的时钟,确保输入输出数据稳定。
module spi_drive(input clk_100m ,input sys_rst_n ,//user interfaceinput spi_start ,//spi开启使能。input [7:0 ] spi_cmd ,//FLAH操作指令input [23:0] spi_addr ,//FLASH地址input [7:0 ] spi_data ,//FLASH写入的数据input [3:0 ] cmd_cnt ,output idel_flag_r ,//空闲状态标志的上升沿 output reg w_data_req ,//FLASH写数据请求 output reg [7:0] r_data ,//FLASH读出的数据output reg erro_flag ,//读出的数据错误标志//spi interfaceoutput reg spi_cs ,//SPI从机的片选信号,低电平有效。output reg spi_clk ,//主从机之间的数据同步时钟。output reg spi_mosi ,//数据引脚,主机输出,从机输入。input spi_miso //数据引脚,主机输入,从机输出。);//状态机
parameter IDLE =4'd0;//空闲状态
parameter WEL =4'd1;//写使能状态
parameter S_ERA =4'd2;//扇区擦除状态
parameter C_ERA =4'd3;//全局擦除
parameter READ =4'd4;//读状态
parameter WRITE =4'd5;//写状态
parameter R_STA_REG =4'd6;//指令集
parameter WEL_CMD =8'h06;
parameter S_ERA_CMD =8'h20;
parameter C_ERA_CMD =8'hc7;
parameter READ_CMD =8'h03;
parameter WRITE_CMD =8'h02;
parameter R_STA_REG_CMD=8'h05;//wire define
wire idel_flag;//reg define
reg[3:0] current_state ;
reg[3:0] next_state ;
reg[7:0 ] data_buffer ;
reg[7:0 ] cmd_buffer ;
reg[7:0 ] sta_reg ;
reg[23:0] addr_buffer ;
reg[31:0] bit_cnt ;
reg clk_cnt ;
reg dely_cnt ;
reg[31:0] dely_state_cnt ;
reg[7:0 ] rd_data_buffer ;
reg spi_clk0 ;
reg stdone ;
reg[7:0 ] data_check ;
reg idel_flag0 ;
reg idel_flag1 ;//*****************************************************
//** main code
//*****************************************************//*抓取上升沿
assign idel_flag=(current_state==IDLE)?1:0;//空闲状态标志
assign idel_flag_r=idel_flag0&&(~idel_flag1);//空闲状态标志的上升沿//*抓取上升沿要用的
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)beginidel_flag0<=1'b1;idel_flag1<=1'b1;endelse beginidel_flag0<=idel_flag;idel_flag1<=idel_flag0;end
end//请求数据 + 把数据放入buffer
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)w_data_req<=1'b0;else if((bit_cnt+2)%8==0&&bit_cnt>=30&&clk_cnt==0&¤t_state==WRITE) //提前2个时钟周期w_data_req<=1'b1;elsew_data_req<=1'b0;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//读出的数据移位寄存if(!sys_rst_n)rd_data_buffer<=8'd0;else if(bit_cnt>=32&&bit_cnt<=2080&&clk_cnt==0&¤t_state==READ) rd_data_buffer<={rd_data_buffer[6:0],spi_miso};elserd_data_buffer<=rd_data_buffer;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//检查读出的数据是否正确if(!sys_rst_n)data_check<=8'd0;else if(bit_cnt%8==0&&bit_cnt>=40&&clk_cnt==1&¤t_state==READ)data_check<=data_check+1'd1;elsedata_check<=data_check;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//读出的数据if(!sys_rst_n)r_data<=8'd0;else if(bit_cnt%8==0&&bit_cnt>38&&clk_cnt==1&¤t_state==READ)r_data<=rd_data_buffer;elser_data<=r_data;
endalways @(posedge clk_100m or negedge sys_rst_n )begin//读出的数据错误标志if(!sys_rst_n)erro_flag<=1'd0;else if(bit_cnt>32&&bit_cnt<=2080&¤t_state==READ&&cmd_cnt==6)beginif(data_check!=r_data)erro_flag<=1'd1;elseerro_flag<=erro_flag;endelseerro_flag<=erro_flag;
end//*把数据放入buffer 提前一个周期
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)data_buffer<=8'd0;else if((bit_cnt+1)%8==0&&bit_cnt>30&&clk_cnt==1)//*把数据放入buffer 提前一个周期data_buffer<=spi_data;else if(clk_cnt==1&¤t_state==WRITE&&bit_cnt>=32)data_buffer<={data_buffer[6:0],data_buffer[7]};elsedata_buffer<=data_buffer;
end//*----位移cmd指令存储器 开始:cs选中且dely未生效,提前了100mhz的周期------------
//使50mhz时数据提前半个周期获得
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)cmd_buffer<=8'd0;else if(spi_cs==0&&dely_cnt==0)cmd_buffer<=spi_cmd;else if(clk_cnt==1&&(current_state==WEL||current_state==S_ERA||current_state==C_ERA||current_state==READ||current_state==WRITE||current_state==R_STA_REG)&&bit_cnt<8)cmd_buffer<={cmd_buffer[6:0],1'b1};elsecmd_buffer<=cmd_buffer;
end//取出地址每一位
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)addr_buffer<=8'd0;else if(spi_cs==0&&dely_cnt==0)addr_buffer<=spi_addr;else if(clk_cnt==1&&(current_state==READ||current_state==WRITE)&&bit_cnt>=8&&bit_cnt<32)addr_buffer<={addr_buffer[22:0],addr_buffer[23]};elseaddr_buffer<=addr_buffer;
end//------------使能后clk_cnt输出50M时钟用于操作信号--------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)clk_cnt<=1'd0;else if(dely_cnt==1)clk_cnt<=clk_cnt+1'd1;else clk_cnt<=1'd0;
end//*---------cs选中器件后的信号输出的 dely_cnt 可以认为是使能操作------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)dely_cnt<=1'd0;else if(spi_cs==0)beginif(dely_cnt<1)dely_cnt<=dely_cnt+1'd1;elsedely_cnt<=dely_cnt;endelsedely_cnt<=1'd0;
end//*-----------------结束的延时计时器------------------------------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)dely_state_cnt<=1'd0;else if(spi_cs)beginif(dely_state_cnt<400000000)dely_state_cnt<=dely_state_cnt+1'd1;elsedely_state_cnt<=dely_state_cnt;endelsedely_state_cnt<=1'd0;
end//*-------------------------bit读写计数---------------------
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)bit_cnt<=11'd0;else if(dely_cnt==1)beginif(clk_cnt==1'b1)bit_cnt<=bit_cnt+1'd1;elsebit_cnt<=bit_cnt;endelsebit_cnt<=11'd0;
end
状态机 :每个状态该干什么,怎么转移
修改里面的命令和转态就可以移植到其他的地方了。
//三段式状态机
always @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n)current_state<=IDLE;elsecurrent_state<=next_state;
endalways @(*)begincase(current_state)IDLE: beginif(spi_start&&spi_cmd==WEL_CMD)next_state=WEL;else if(spi_start&&spi_cmd==C_ERA_CMD)next_state=C_ERA;else if(spi_start&&spi_cmd==S_ERA_CMD)next_state=S_ERA;else if(spi_start&&spi_cmd==READ_CMD)next_state=READ;else if(spi_start&&spi_cmd==WRITE_CMD)next_state=WRITE;else if(spi_start&&spi_cmd==R_STA_REG_CMD)next_state=R_STA_REG;elsenext_state=IDLE;endWEL: beginif(stdone&&bit_cnt>=8)next_state=IDLE;elsenext_state=WEL;endS_ERA: beginif(stdone)next_state=IDLE;elsenext_state=S_ERA;endC_ERA: begin if(stdone)next_state=IDLE;elsenext_state=C_ERA;endREAD: begin if(stdone&&bit_cnt>=8)next_state=IDLE;elsenext_state=READ;endWRITE: begin if(stdone&&bit_cnt>=8)next_state=IDLE;elsenext_state=WRITE;endR_STA_REG: begin if(stdone)next_state=IDLE;elsenext_state=R_STA_REG;enddefault: next_state=IDLE; endcase
endalways @(posedge clk_100m or negedge sys_rst_n )beginif(!sys_rst_n) beginspi_cs<=1'b1;spi_clk<=1'b0;spi_clk0<=1'b0;spi_mosi<=1'b0; stdone<=1'b0; endelse begincase(current_state)IDLE: beginspi_cs<=1'b1;spi_clk<=1'b0;spi_mosi<=1'b0; endWEL: beginstdone<=1'b0;spi_cs<=1'b0;if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt==8&&clk_cnt==0)beginstdone<=1'b1;spi_clk<=1'b0; spi_mosi<=1'b0; endelse if(bit_cnt==8&&clk_cnt==1)beginspi_cs<=1'b1; endendC_ERA: beginstdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt==8&&clk_cnt==0)beginstdone<=1'b1; spi_clk<=1'b0;spi_mosi<=1'b0; endelse if(bit_cnt==8&&clk_cnt==1)beginspi_cs<=1'b1; endendS_ERA: beginstdone<=1'b0; if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt>=8&&bit_cnt<32&&spi_cs==0)beginspi_cs<=1'b0;spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=addr_buffer[23];endelse if(bit_cnt==32&&clk_cnt==0) beginspi_cs<=1'b1;spi_clk<=1'b0;spi_mosi<=1'b0;stdone<=1'b1;endendREAD: beginstdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt>=8&&bit_cnt<32&&spi_cs==0)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=addr_buffer[23];endelse if(bit_cnt>=32&&bit_cnt<2080)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=1'b0; endelse if(bit_cnt==2080&&clk_cnt==0) begin spi_clk<=1'b0;spi_mosi<=1'b0;stdone<=1'b1; endelse if(bit_cnt==2080&&clk_cnt==1) beginspi_cs<=1'b1;endendWRITE: beginstdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8) begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt>=8&&bit_cnt<32&&spi_cs==0)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=addr_buffer[23];endelse if(bit_cnt>=32&&bit_cnt<2080)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=data_buffer[7];endelse if(bit_cnt==2080&&clk_cnt==0) beginspi_clk<=1'b0;spi_mosi<=1'b0;stdone<=1'b1;endelse if(bit_cnt==2080&&clk_cnt==1) beginspi_cs<=1'b1;endendR_STA_REG:begin stdone<=1'b0;if(dely_state_cnt==10) spi_cs<=1'b0;else if(dely_cnt==1&&bit_cnt<8)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=cmd_buffer[7];endelse if(bit_cnt==8)begin spi_clk0<=~spi_clk0;spi_clk<=spi_clk0;spi_mosi<=1'b0; end else if(~spi_miso&&bit_cnt%8==0)beginspi_clk<=1'b0;spi_cs<=1'b1;stdone<=1'b1;endelse if(~spi_cs&&dely_cnt==1)beginspi_clk0<=~spi_clk0;spi_clk<=spi_clk0;end end default: beginstdone<=1'b0;spi_cs<=1'b1;spi_clk<=1'b0;spi_clk0<=1'b0;spi_mosi<=1'b0; endendcaseend
endendmodule2. SPI协议的使用
首先系统开始运行,来几个周期延伸。
spi_start信号只是一个周期脉冲。
idel_flag_r是进入空闲状态的标志位也就是意味着上一步操作完成。
cmd计数指令不断加来切换不同的命令。
spi_cmd 输出命令
module flash_rw(input sys_clk ,input sys_rst_n ,input idel_flag_r ,input w_data_req ,output reg[3:0 ] cmd_cnt ,output reg spi_start ,//spi开启使能。output reg[7:0 ] spi_cmd ,output reg[7:0 ] spi_data );//指令集
parameter WEL_CMD =16'h06;
parameter S_ERA_CMD =16'h20;
parameter C_ERA_CMD =16'hc7;
parameter READ_CMD =16'h03;
parameter WRITE_CMD =16'h02;
parameter R_STA_REG_CMD=8'h05 ;//reg define
reg[3:0] flash_start;//SPI 要写入的数据
always @(posedge sys_clk or negedge sys_rst_n )beginif(!sys_rst_n)flash_start<=0;else if(flash_start<=5)flash_start<=flash_start+1;elseflash_start<=flash_start;
endalways @(posedge sys_clk or negedge sys_rst_n )beginif(!sys_rst_n)cmd_cnt<=0;else if(flash_start==4)spi_start<=1'b1;else if(idel_flag_r&&cmd_cnt<10)begincmd_cnt<=cmd_cnt+1;spi_start<=1'b1;endelse begincmd_cnt<=cmd_cnt;spi_start<=1'b0;end
endalways @(posedge sys_clk or negedge sys_rst_n )beginif(!sys_rst_n)spi_data<=8'd0;else if(w_data_req)spi_data<=spi_data+1'b1;elsespi_data<=spi_data;
endalways @(*)begincase(cmd_cnt)0:spi_cmd=WEL_CMD;1:spi_cmd=C_ERA_CMD;2:spi_cmd=R_STA_REG_CMD;3:spi_cmd=WEL_CMD;4:spi_cmd=WRITE_CMD;5:spi_cmd=R_STA_REG_CMD;6:spi_cmd=READ_CMD;7:spi_cmd=WEL_CMD;8:spi_cmd=S_ERA_CMD;9:spi_cmd=R_STA_REG_CMD;10:spi_cmd=READ_CMD;default:;endcase
endendmodule