参考:
https://stackoverflow.com/questions/67707828/how-to-get-every-seconds-gpu-usage-in-python
自己测试
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt
import torchvision
from torchvision import transforms
# 加载数据import subprocess as sp
import os
from threading import Thread , Timer
import sched, timedef get_gpu_memory():output_to_list = lambda x: x.decode('ascii').split('\n')[:-1]ACCEPTABLE_AVAILABLE_MEMORY = 1024COMMAND = "nvidia-smi --query-gpu=memory.used --format=csv"try:memory_use_info = output_to_list(sp.check_output(COMMAND.split(),stderr=sp.STDOUT))[1:]except sp.CalledProcessError as e:raise RuntimeError("command '{}' return with error (code {}): {}".format(e.cmd, e.returncode, e.output))memory_use_values = [int(x.split()[0]) for i, x in enumerate(memory_use_info)]# print(memory_use_values)return memory_use_valuesdef print_gpu_memory_every_5secs():"""This function calls itself every 5 secs and print the gpu_memory."""file = open("./GPU_usage.csv", "a+")Timer(5.0, print_gpu_memory_every_5secs).start()#print(get_gpu_memory())mem = get_gpu_memory()[0]print("{}".format(mem), file=file)print_gpu_memory_every_5secs()transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize(mean=0.5, std=0.5)])train_ds = torchvision.datasets.MNIST('data/',train=True,transform=transform,download= True)
dataloader = torch.utils.data.DataLoader(train_ds, batch_size=256, shuffle=True,num_workers=4,pin_memory=True)
print(len(dataloader))
# 定义生成器
class Generator(nn.Module):def __init__(self):super(Generator,self).__init__()self.linear1 = nn.Linear(100, 256*7*7) self.bn1 = nn.BatchNorm1d(256*7*7)self.deconv1 = nn.ConvTranspose2d(256, 128,kernel_size=(3,3),stride=1, padding=1 ) # 得到128*7*7的图像self.bn2 = nn.BatchNorm2d(128)self.deconv2 = nn.ConvTranspose2d(128, 64,kernel_size=(4,4),stride=2,padding=1 # 64*14*14)self.bn3 = nn.BatchNorm2d(64)self.deconv3 = nn.ConvTranspose2d(64, 1,kernel_size=(4, 4),stride=2,padding=1 # 1*28*28)def forward(self, x):x = F.relu(self.linear1(x))x = self.bn1(x)x = x.view(-1, 256, 7, 7)x = F.relu(self.deconv1(x))x = self.bn2(x)x = F.relu(self.deconv2(x))x = self.bn3(x)x = torch.tanh(self.deconv3(x))return x# 定义判别器
# input:1,28,28
class Discriminator(nn.Module):def __init__(self):super(Discriminator, self).__init__()self.conv1 = nn.Conv2d(1, 64, kernel_size=3, stride=2) # 第一层不适用bn 64,13,13self.conv2 = nn.Conv2d(64, 128, kernel_size=3, stride=2) #128,6,6self.bn = nn.BatchNorm2d(128)self.fc = nn.Linear(128*6*6, 1) # 输出一个概率值def forward(self, x):x = F.dropout2d(F.leaky_relu(self.conv1(x)))x = F.dropout2d(F.leaky_relu(self.conv2(x))) # (batch, 128,6,6)x = self.bn(x)x = x.view(-1, 128*6*6) # (batch, 128,6,6)---> (batch, 128*6*6)x = torch.sigmoid(self.fc(x))return x# 初始化模型
device = 'cuda' if torch.cuda.is_available() else 'cpu'
gen = Generator().to(device)
dis = Discriminator().to(device)# 损失计算函数
loss_function = torch.nn.BCELoss()# 定义优化器
d_optim = torch.optim.Adam(dis.parameters(), lr=1e-5)
g_optim = torch.optim.Adam(gen.parameters(), lr=1e-4)def generate_and_save_images(model, epoch, test_input):predictions = np.squeeze(model(test_input).cpu().numpy()) fig = plt.figure(figsize=(4, 4))for i in range(predictions.shape[0]):plt.subplot(4, 4, i + 1)plt.imshow((predictions[i] + 1) / 2, cmap='gray') plt.axis("off")plt.show()test_input = torch.randn(16, 100, device=device)# 开始训练
D_loss = []
G_loss = []
# 训练循环
for epoch in range(10):d_epoch_loss = 0g_epoch_loss = 0count = len(dataloader)# 对全部的数据集做一次迭代for step, (img, _) in enumerate(dataloader):img = img.to(device) size = img.shape[0] # 返回img的第一维的大小random_noise = torch.randn(size, 100, device=device) d_optim.zero_grad() # 将上述步骤的梯度归零real_output = dis(img) # 对判别器输入真实的图片,real_output是对真实图片的预测结果d_real_loss = loss_function(real_output,torch.ones_like(real_output, device=device))d_real_loss.backward() #求解梯度# 得到判别器在生成图像上的损失gen_img = gen(random_noise)fake_output = dis(gen_img.detach()) d_fake_loss = loss_function(fake_output,torch.zeros_like(fake_output, device=device))d_fake_loss.backward()d_loss = d_real_loss + d_fake_lossd_optim.step() # 优化# 得到生成器的损失g_optim.zero_grad()fake_output = dis(gen_img)g_loss = loss_function(fake_output,torch.ones_like(fake_output, device=device))g_loss.backward()g_optim.step()with torch.no_grad():d_epoch_loss += d_loss.item() g_epoch_loss += g_loss.item()with torch.no_grad():d_epoch_loss /= countg_epoch_loss /= countD_loss.append(d_epoch_loss)G_loss.append(g_epoch_loss)generate_and_save_images(gen, epoch, test_input)print('Epoch:', epoch)
plt.plot(D_loss, label='D_loss')
plt.plot(G_loss, label='G_loss')
plt.legend()
plt.show()
print("done")
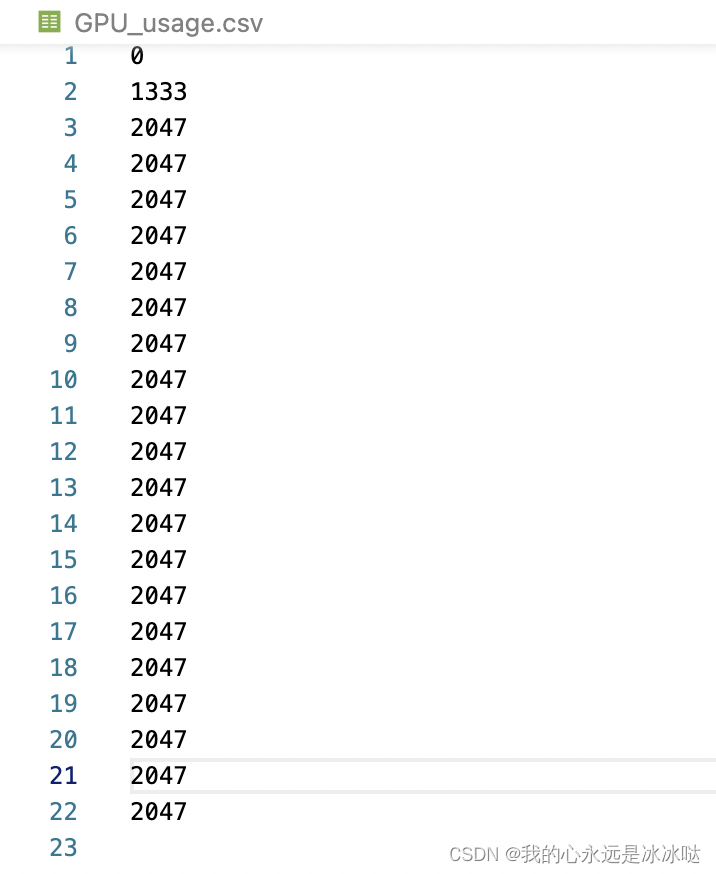
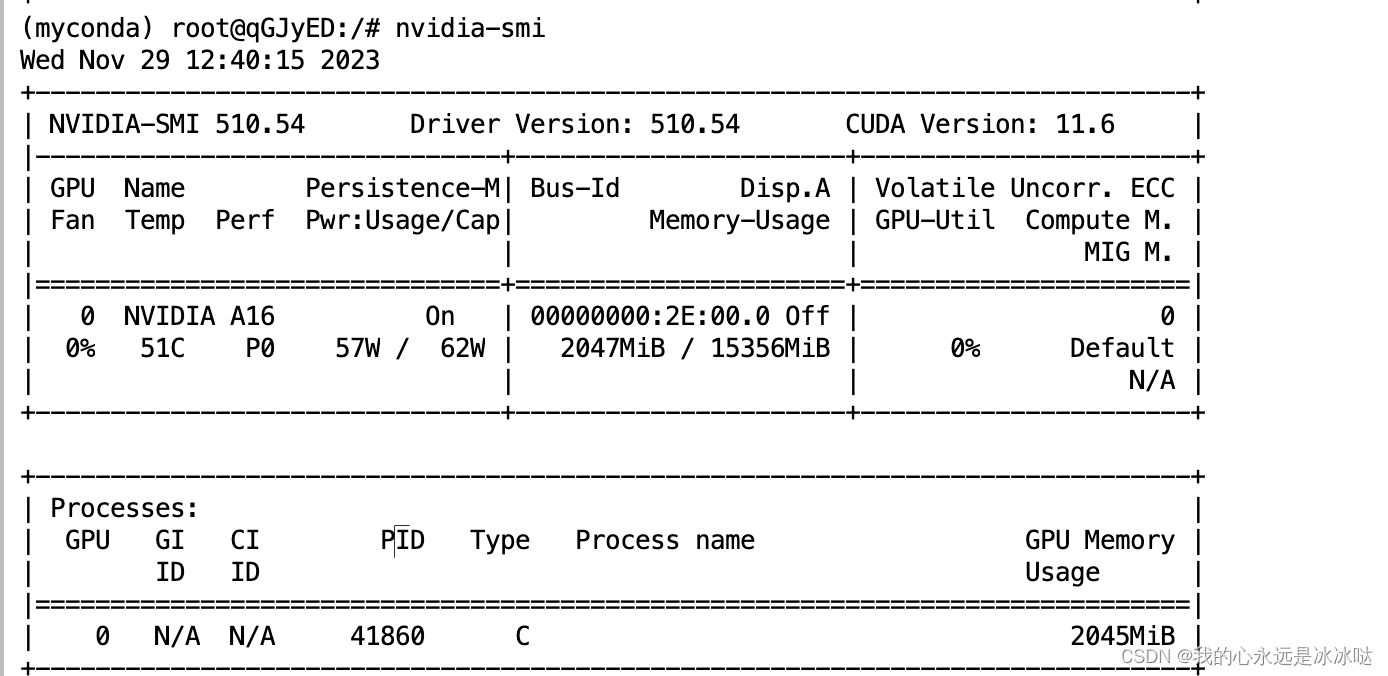
最终的结果如下
这个和
是差不多的,
但是目前这个做法有一个问题,就是我的主程序停止了,print_GPU_memory()函数还在跑,只能自己手动关闭,这个我不知道怎么解决