目录
一、新字符设备驱动原理
1.分配和释放设备号
2.新的字符设备注册方法
(1) 字符设备结构
(2)cdev_init函数
(3) cdev_add函数
(4)cdev_del 函数
二、自动创建设备节点
1.mdev 机制
2.创建和删除类
3. 创建设备
4. 参考示例
三、 设置文件私有数据
四、硬件原理图分析
五、实验程序编写
1. LED 灯驱动程序编写
2.编写测试APP
六、运行测试
1. 编译驱动程序和测试APP
(1)编译驱动程序
(2)编译测试APP
2. 运行测试
经过前两章实验的实战操作,我们已经掌握了Linux 字符设备驱动开发的基本步骤,字符设备驱动开发重点是使用register_chrdev 函数注册字符设备,当不再使用设备的时候就使用unregister_chrdev 函数注销字符设备,驱动模块加载成功以后还需要手动使用mknod 命令创建设备节点。register_chrdev 和unregister_chrdev 这两个函数是老版本驱动使用的函数,现在新的字符设备驱动已经不再使用这两个函数,而是使用Linux 内核推荐的新字符设备驱动API函数。本节我们就来学习一下如何编写新字符设备驱动,并且在驱动模块加载的时候自动创建设备节点文件。
一、新字符设备驱动原理
1.分配和释放设备号
使用register_chrdev 函数注册字符设备的时候只需要给定一个主设备号即可,但是这样会带来两个问题:
①、需要我们事先确定好哪些主设备号没有使用。
②、会将一个主设备号下的所有次设备号都使用掉,比如现在设置LED 这个主设备号为200,那么0~1048575(2^20-1)这个区间的次设备号就全部都被LED 一个设备分走了。这样太浪费次设备号了!一个LED 设备肯定只能有一个主设备号,一个次设备号。
解决这两个问题最好的方法就是要使用设备号的时候向Linux 内核申请,需要几个就申请几个,由Linux 内核分配设备可以使用的设备号。这个就是我们在40.3.2 小节讲解的设备号的分配,如果没有指定设备号的话就使用如下函数来申请设备号:
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)如果给定了设备的主设备号和次设备号就使用如下所示函数来注册设备号即可:
int register_chrdev_region(dev_t from, unsigned count, const char *name)参数from是要申请的起始设备号,也就是给定的设备号;参数count 是要申请的数量,一般都是一个;参数name 是设备名字。
注销字符设备之后要释放掉设备号, 不管是通过alloc_chrdev_region 函数还是register_chrdev_region 函数申请的设备号,统一使用如下释放函数:
void unregister_chrdev_region(dev_t from, unsigned count)新字符设备驱动下,设备号分配示例代码如下:

如果要注销设备号的话,使用如下代码即可:
unregister_chrdev_region(devid, 1); /* 注销设备号 */2.新的字符设备注册方法
(1) 字符设备结构
在Linux 中使用cdev 结构体表示一个字符设备,cdev 结构体在include/linux/cdev.h 文件中的定义如下:

在cdev 中有两个重要的成员变量:ops 和dev,这两个就是字符设备文件操作函数集合file_operations 以及设备号dev_t。编写字符设备驱动之前需要定义一个cdev 结构体变量,这个变量就表示一个字符设备,如下所示:
struct cdev test_cdev;(2)cdev_init函数
定义好cdev 变量以后就要使用cdev_init 函数对其进行初始化,cdev_init 函数原型如下:
void cdev_init(struct cdev *cdev, const struct file_operations *fops)参数cdev 就是要初始化的cdev 结构体变量,参数fops 就是字符设备文件操作函数集合。使用cdev_init 函数初始化cdev 变量的示例代码如下:

(3) cdev_add函数
cdev_add 函数用于向Linux 系统添加字符设备(cdev 结构体变量),首先使用cdev_init 函数完成对cdev 结构体变量的初始化,然后使用cdev_add 函数向Linux 系统添加这个字符设备。cdev_add 函数原型如下:
int cdev_add(struct cdev *p, dev_t dev, unsigned count)参数p 指向要添加的字符设备(cdev 结构体变量),参数dev 就是设备所使用的设备号,参数count 是要添加的设备数量。完善示例代码42.1.2.2,加入cdev_add 函数,内容如下所示:

示例代码42.1.2.2 就是新的注册字符设备代码段,Linux 内核中大量的字符设备驱动都是采用这种方法向Linux 内核添加字符设备。如果在加上示例代码42.1.1.1 中分配设备号的程序,那么就它们一起实现的就是函数register_chrdev 的功能。
(4)cdev_del 函数
卸载驱动的时候一定要使用cdev_del 函数从Linux 内核中删除相应的字符设备,cdev_del函数原型如下:
void cdev_del(struct cdev *p)参数p 就是要删除的字符设备。如果要删除字符设备,参考如下代码:
![]()
cdev_del 和unregister_chrdev_region 这两个函数合起来的功能相当于unregister_chrdev 函数。
二、自动创建设备节点
在前面的Linux 驱动实验中,当我们使用modprobe 加载驱动程序以后还需要使用命令“mknod”手动创建设备节点。本节就来讲解一下如何实现自动创建设备节点,在驱动中实现自动创建设备节点的功能以后,使用modprobe 加载驱动模块成功的话就会自动在/dev 目录下创建对应的设备文件。
1.mdev 机制
udev 是一个用户程序,在Linux 下通过udev 来实现设备文件的创建与删除,udev 可以检测系统中硬件设备状态,可以根据系统中硬件设备状态来创建或者删除设备文件。比如使用modprobe 命令成功加载驱动模块以后就自动在/dev 目录下创建对应的设备节点文件,使用rmmod 命令卸载驱动模块以后就删除掉/dev 目录下的设备节点文件。使用busybox 构建根文件系统的时候,busybox 会创建一个udev 的简化版本—mdev,所以在嵌入式Linux 中我们使用mdev 来实设备节点文件的自动创建与删除,Linux 系统中的热插拔事件也由mdev 管理,在/etc/init.d/rcS 文件中如下语句:
echo /sbin/mdev > /proc/sys/kernel/hotplug2.创建和删除类
自动创建设备节点的工作是在驱动程序的入口函数中完成的,一般在cdev_add 函数后面添加自动创建设备节点相关代码。首先要创建一个class 类,class 是个结构体,定义在文件include/linux/device.h 里面。class_create 是类创建函数,class_create 是个宏定义,内容如下:

根据上述代码,将宏class_create 展开以后内容如下:
struct class *class_create (struct module *owner, const char *name)class_create 一共有两个参数,参数owner 一般为THIS_MODULE,参数name 是类名字。返回值是个指向结构体class 的指针,也就是创建的类。卸载驱动程序的时候需要删除掉类,类删除函数为class_destroy,函数原型如下:
void class_destroy(struct class *cls);参数cls 就是要删除的类。
3. 创建设备
上一小节创建好类以后还不能实现自动创建设备节点,我们还需要在这个类下创建一个设备。使用device_create 函数在类下面创建设备,device_create 函数原型如下:

device_create 是个可变参数函数,参数class 就是设备要创建哪个类下面;参数parent 是父设备,一般为NULL,也就是没有父设备;参数devt 是设备号;参数drvdata 是设备可能会使用的一些数据,一般为NULL;参数fmt 是设备名字,如果设置fmt=xxx 的话,就会生成/dev/xxx这个设备文件。返回值就是创建好的设备。
同样的,卸载驱动的时候需要删除掉创建的设备,设备删除函数为device_destroy,函数原型如下:
void device_destroy(struct class *class, dev_t devt)参数class是要删除的设备所处的类,参数devt是要删除的设备号。
4. 参考示例
在驱动入口函数里面创建类和设备,在驱动出口函数里面删除类和设备,参考示例如下:

三、 设置文件私有数据
每个硬件设备都有一些属性,比如主设备号(dev_t),类(class)、设备(device)、开关状(state)等等,在编写驱动的时候你可以将这些属性全部写成变量的形式,如下所示:

对于一个设备的所有属性信息我们最好将其做成一个结构体。编写驱动open 函数的时候将设备结构体作为私有数据添加到设备文件中,如下所示:

在open 函数里面设置好私有数据以后,在write、read、close 等函数中直接读取private_data即可得到设备结构体。
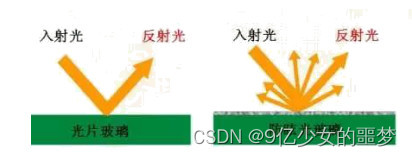
四、硬件原理图分析

从上图可以看出,LED0 接到了GPIO_3 上,GPIO_3 就是GPIO1_IO03,当GPIO1_IO03输出低电平(0)的时候发光二极管LED0 就会导通点亮,当GPIO1_IO03 输出高电平(1)的时候发光二极管LED0 不会导通,因此LED0 也就不会点亮。所以LED0 的亮灭取决于GPIO1_IO03的输出电平,输出0 就亮,输出1 就灭。
五、实验程序编写
1. LED 灯驱动程序编写
新建名为“3_newchrled”文件夹,然后在3_newchrled 文件夹里面创建vscode 工程,工作区命名为“newchrled”。工程创建好以后新建newchrled.c 文件,在newchrled.c 里面输入如下内容:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define NEWCHRLED_CNT 1 //设备号个数
#define NEWCHRLED_NAME "newchrled" //名字
#define LEDOFF 0 //关灯
#define LEDON 1 //开灯//寄存器物理地址
#define CCM_CCGR1_BASE (0X020C406C)
#define SW_MUX_GPIO1_IO03_BASE (0X020E0068)
#define SW_PAD_GPIO1_IO03_BASE (0X020E02F4)
#define GPIO1_DR_BASE (0X0209C000)
#define GPIO1_GDIR_BASE (0X0209C004)//映射后的寄存器虚拟地址指针
static void __iomem *IMX6U_CCM_CCGR1;
static void __iomem *SW_MUX_GPIO1_IO03;
static void __iomem *SW_PAD_GPIO1_IO03;
static void __iomem *GPIO1_DR;
static void __iomem *GPIO1_GDIR;//newchrled设备结构体
struct newchrled_dev{dev_t devid; //设备号 struct cdev cdev; //cdevstruct class *class; //类struct device *device; //设备int major; //主设备号int minor; //次设备号};
struct newchrled_dev newchrled; //led设备
//LED打开/关闭
void led_switch(u8 sta)
{u32 val = 0;if(sta == LEDON){val = readl(GPIO1_DR);val &= ~(1 << 3);writel(val, GPIO1_DR);}else if (sta == LEDOFF){val = readl(GPIO1_DR);val |= (1 << 3);writel(val, GPIO1_DR);}
}
//打开设备
static int led_open(struct inode *inode, struct file *filp)
{filp->private_data = &newchrled;//设置私有数据return 0;
}
//从设备读取数据
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}
//向设备写数据
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0){printk("kernel write error!\n");return -EFAULT;}ledstat = databuf[0]; // 获取状态值if(ledstat == LEDON){led_switch(LEDON);//打开LED}else if(ledstat == LEDOFF){led_switch(LEDOFF);//关闭LED}return 0;
}
static int led_release(struct inode *inode, struct file *filp)
{return 0;
}//设备操作函数
static struct file_operations newchrled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};//驱动入口函数
static int __init led_init(void)
{u32 val = 0;//初始化LED//1.寄存器地址映射IMX6U_CCM_CCGR1 = ioremap(CCM_CCGR1_BASE, 4);SW_MUX_GPIO1_IO03 = ioremap(SW_MUX_GPIO1_IO03_BASE, 4);SW_PAD_GPIO1_IO03 = ioremap(SW_PAD_GPIO1_IO03_BASE, 4);GPIO1_DR = ioremap(GPIO1_DR_BASE, 4);GPIO1_GDIR = ioremap(GPIO1_GDIR_BASE, 4);//2.使能GPIO1时钟val = readl(IMX6U_CCM_CCGR1);val &= ~(3 << 26); //清除以前的设置val |= (3 << 26); //设置新值writel(val, IMX6U_CCM_CCGR1);//3.设置GPIO_IO03的复用功能,将其复用为GPIO1_IO03,最后设置IO属性writel(5, SW_MUX_GPIO1_IO03);//寄存器SW_PAD_GPIO1_IO03设置IO属性writel(0x10B0, SW_PAD_GPIO1_IO03);//4.设置GPIO1_IO03为输出功能val = readl(GPIO1_GDIR);val &= ~(1 << 3); //清楚以前的设置val |= (1 << 3); //设置为输出writel(val, GPIO1_GDIR);//5.默认关闭LEDval = readl(GPIO1_DR);val |= (1 << 3);writel(val, GPIO1_DR);//注册字符设备驱动//1.创建设备号if (newchrled.major) //定义了设备号{newchrled.devid = MKDEV(newchrled.major, 0);register_chrdev_region(newchrled.devid, NEWCHRLED_CNT, NEWCHRLED_NAME);}else //没有定义设备号{alloc_chrdev_region(&newchrled.devid, 0, NEWCHRLED_CNT, NEWCHRLED_NAME); //申请设备号newchrled.major = MAJOR(newchrled.devid); // 获取主设备号newchrled.minor = MINOR(newchrled.devid); // 获取次设备号}printk("newchrled major = %d, minor = %d\r\n", newchrled.major, newchrled.minor);//2.初始化cdevnewchrled.cdev.owner = THIS_MODULE;cdev_init(&newchrled.cdev, &newchrled_fops);//3.添加一个cdevcdev_add(&newchrled.cdev, newchrled.devid, NEWCHRLED_CNT);//4.初始化classnewchrled.class = class_create(THIS_MODULE, NEWCHRLED_NAME);if (IS_ERR(newchrled.class)){return PTR_ERR(newchrled.class); //返回错误码}//5.创建设备号newchrled.device = device_create(newchrled.class, NULL, newchrled.devid, NULL, NEWCHRLED_NAME);if (IS_ERR(newchrled.device)){return PTR_ERR(newchrled.device); //返回错误码}return 0;
}
//驱动出口函数
static void __exit led_exit(void)
{//取消映射iounmap(IMX6U_CCM_CCGR1);iounmap(SW_MUX_GPIO1_IO03);iounmap(SW_PAD_GPIO1_IO03);iounmap(GPIO1_DR);iounmap(GPIO1_GDIR);//注销字符设备cdev_del(&newchrled.cdev); // 删除cdevunregister_chrdev_region(newchrled.devid, NEWCHRLED_CNT);device_destroy(newchrled.device, newchrled.devid);class_destroy(newchrled.class);
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("ssz");
2.编写测试APP
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"#define LEDOFF 0
#define LEDON 1int main(int argc, char *argv[])
{int fd, retvalue;char *filename;unsigned char databuf[1];if(argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];//打开led驱动fd = open(filename, O_RDWR);if(fd < 0){printf("filr %s open failed!\r\n", argv[1]);return -1;}databuf[0] = atoi(argv[2]);//向/dev/led文件写入数据retvalue = write(fd, databuf, sizeof(databuf));if(retvalue < 0){printf("LED Control Failed!\r\n");close(fd);return -1;}retvalue = close(fd); //关闭文件if(retvalue < 0){printf("fail %s close failed!\r\n",argv[1]);return -1;}return 0;
}
六、运行测试
1. 编译驱动程序和测试APP
(1)编译驱动程序
编写Makefile 文件,本章实验的Makefile 文件和第四十章实验基本一样,只是将obj-m 变
量的值改为newchrled.o,Makefile 内容如下所示:
KERNELDIR := /home/ssz/linux/IMX6ULL/linux/temp/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)
obj-m := newchrled.obuild : kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean输入make命令编译

(2)编译测试APP
arm-linux-gnueabihf-gcc ledApp.c -o ledApp编译成功以后就会生成ledApp 这个应用程序。
2. 运行测试
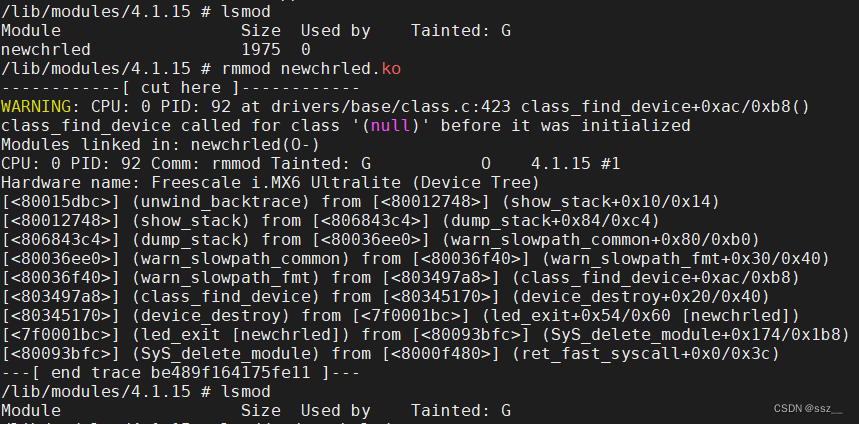
将上一小节编译出来的newchrled.ko 和ledApp 这两个文件拷贝到rootfs/lib/modules/4.1.15目录中,重启开发板,进入到目录lib/modules/4.1.15 中,输入如下命令加载newchrled.ko 驱动模块:

从上图可以看出,申请到的主设备号为249,次设备号为0。驱动加载成功以后会自动在/dev 目录下创建设备节点文件/dev/newchrdev,输入如下命令查看/dev/newchrdev 这个设备节点文件是否存在:
![]()
从上图中可以看出,/dev/newchrled 这个设备文件存在,而且主设备号为249,次设备号为0,说明设备节点文件创建成功。驱动节点创建成功以后就可以使用ledApp 软件来测试驱动是否工作正常,输入如下命令打开LED 灯:
![]()

输入上述命令以后观察I.MX6U-ALPHA 开发板上的红色LED 灯是否点亮,如果点亮的话说明驱动工作正常。在输入如下命令关闭LED 灯:
![]()

输入上述命令以后观察I.MX6U-ALPHA 开发板上的红色LED 灯是否熄灭。如果要卸载驱动的话输入如下命令即可: