编写基于iio的mpu6050
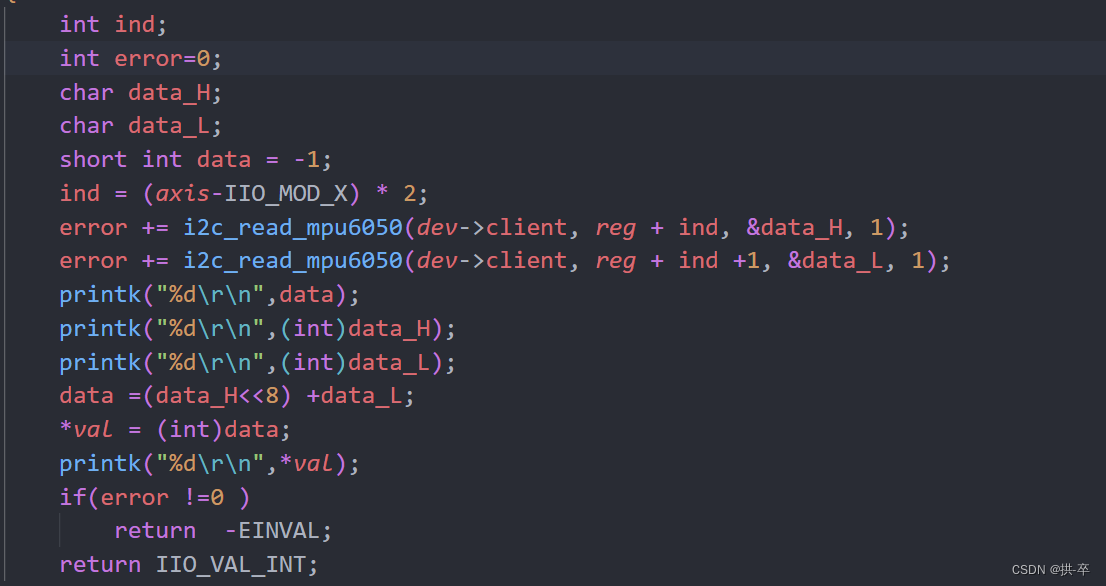
遇到的问题,在读取数据时,读出来的数据不能直接拼接成int类型

需要先将其转换成short int,再转换成int

效果如图所示
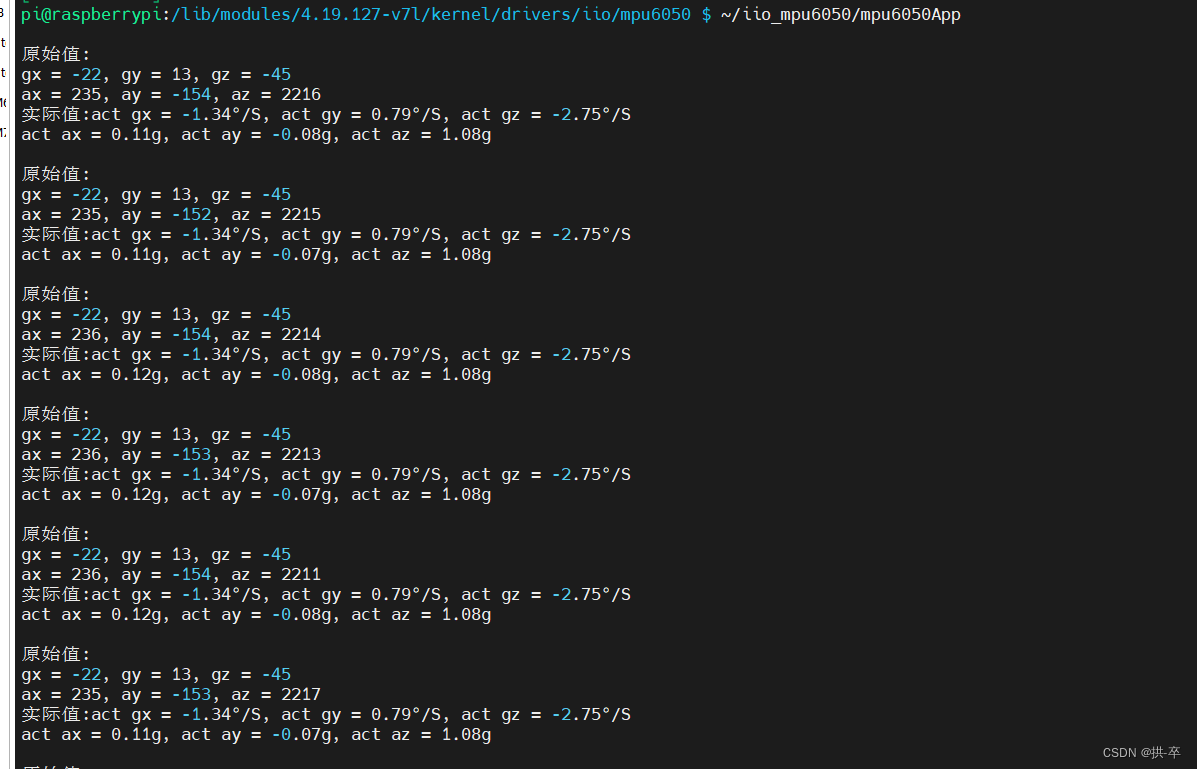
注:驱动是使用的modprobe加载的
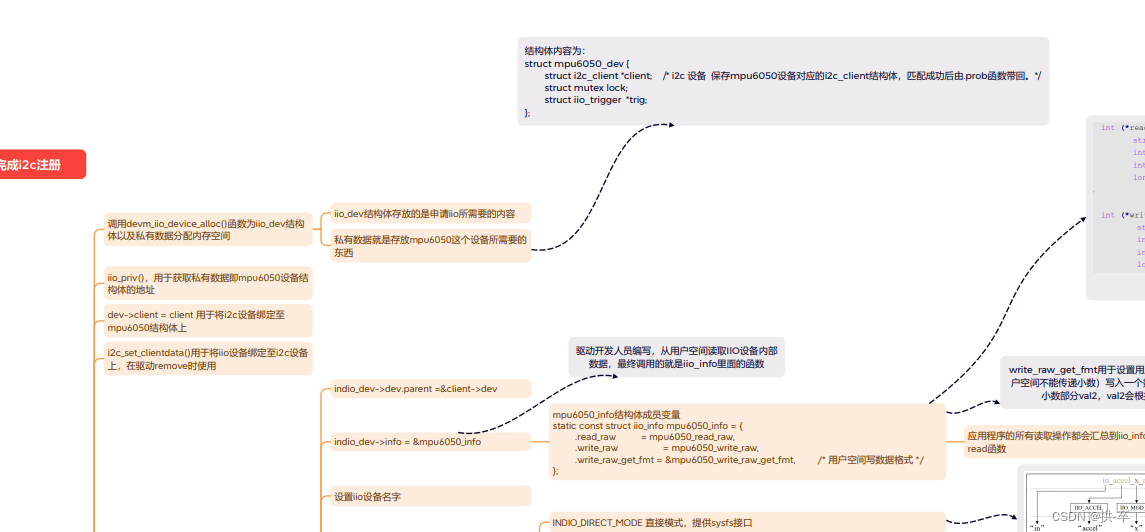
画的思维导图(部分,上传的文件中有完整的)
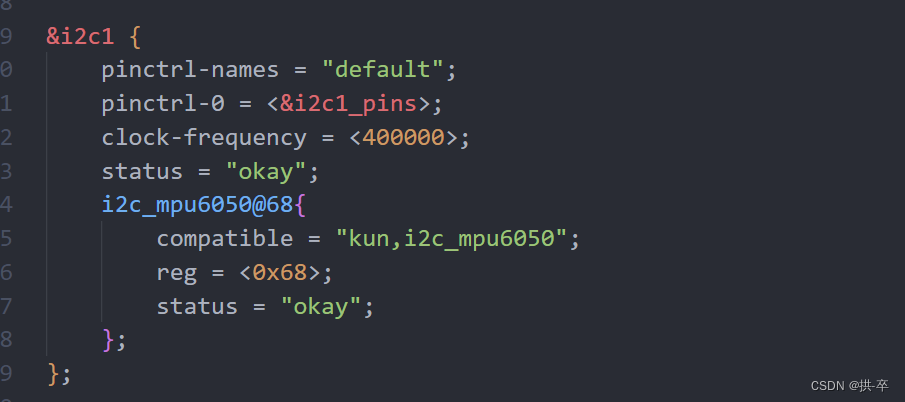
设备树修改部分:
参考资料:正点原子 I.MX6U嵌入式linux驱动开发指南
mpu6050.c文件代码
/***************************************************************
文件名 : mpu6050.c
作者 : kun
版本 : V1.0
描述 : mpu6050驱动程序
其他 : 无
日志 : 初版V1.0 2023/12/5 kun创建V1.1 2023/12/5
***************************************************************/
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/delay.h>
#include <linux/errno.h>
#include <linux/platform_device.h>
#include <linux/gpio.h>
#include <linux/device.h>
#include <asm/uaccess.h>
#include <linux/cdev.h>
#include <linux/regmap.h>
#include <linux/i2c.h>
#include <linux/iio/iio.h>
#include <linux/iio/sysfs.h>
#include <linux/iio/buffer.h>
#include <linux/iio/trigger.h>
#include <linux/iio/triggered_buffer.h>
#include <linux/iio/trigger_consumer.h>
#include "mpu6050.h"#define MPU6050_NAME "mpu6050"#define MPU6050_CHAN(ty_pe, channel_2 , index) \{ \.type = ty_pe, \.modified = 1, \.channel2 = channel_2, \.info_mask_shared_by_type = BIT(IIO_CHAN_INFO_SCALE), \.info_mask_separate = BIT(IIO_CHAN_INFO_RAW) | \BIT(IIO_CHAN_INFO_CALIBBIAS), \.scan_index = index, \.scan_type = { \.sign = 's', \.realbits = 16, \.storagebits = 16, \.shift = 0, \.endianness = IIO_BE, \}, \}enum inv_mpu6050_scan {INV_MPU6050_SCAN_ACCL_X,INV_MPU6050_SCAN_ACCL_Y,INV_MPU6050_SCAN_ACCL_Z,INV_MPU6050_SCAN_GYRO_X,INV_MPU6050_SCAN_GYRO_Y,INV_MPU6050_SCAN_GYRO_Z,
};struct mpu6050_dev{struct i2c_client *client; /* i2c 设备 保存mpu6050设备对应的i2c_client结构体,匹配成功后由.prob函数带回。*/struct mutex lock;struct iio_trigger *trig;
};/** mpu6050陀螺仪分辨率,对应250、500、1000、2000,计算方法:* 以正负250度量程为例,500/2^16=0.007629,扩大1000000倍,就是7629*/
static const int gyro_scale_mpu6050[] = {7629, 15258, 30517, 61035};/* * mpu6050加速度计分辨率,对应2、4、8、16 计算方法:* 以正负2g量程为例,4/2^16=0.000061035,扩大1000000000倍,就是61035*/
static const int accel_scale_mpu6050[] = {61035, 122070, 244140, 488281};/*
* MPU6050 通道 3路陀螺仪,3路加速度
*/static const struct iio_chan_spec mpu6050_channels[]={MPU6050_CHAN(IIO_ANGL_VEL, IIO_MOD_X, INV_MPU6050_SCAN_GYRO_X),MPU6050_CHAN(IIO_ANGL_VEL, IIO_MOD_Y, INV_MPU6050_SCAN_GYRO_Y),MPU6050_CHAN(IIO_ANGL_VEL, IIO_MOD_Z, INV_MPU6050_SCAN_GYRO_Z),MPU6050_CHAN(IIO_ACCEL, IIO_MOD_X, INV_MPU6050_SCAN_ACCL_X),MPU6050_CHAN(IIO_ACCEL, IIO_MOD_Y, INV_MPU6050_SCAN_ACCL_Y),MPU6050_CHAN(IIO_ACCEL, IIO_MOD_Z, INV_MPU6050_SCAN_ACCL_Z),
};/*------------------IIC设备内容----------------------*//*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 数据要写入的地址,
*data, 要写入的数据
*返回值,错误,-1。成功,0
*/
static int i2c_write_mpu6050(struct i2c_client *mpu6050_client, u8 address, u8 data)
{int error = 0;u8 write_data[2];struct i2c_msg send_msg; //要发送的数据结构体/*设置要发送的数据*/write_data[0] = address;write_data[1] = data;/*发送 iic要写入的地址 reg*/send_msg.addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址send_msg.flags = 0; //标记为发送数据send_msg.buf = write_data; //写入的首地址send_msg.len = 2; //reg长度/*执行发送*/error = i2c_transfer(mpu6050_client->adapter, &send_msg, 1);if (error != 1){printk(KERN_DEBUG "\n i2c_transfer error \n");return -1;}return 0;
}/*通过i2c 向mpu6050写入数据
*mpu6050_client:mpu6050的i2c_client结构体。
*address, 要读取的地址,
*data,保存读取得到的数据
*length,读长度
*返回值,错误,-1。成功,0
*/
static int i2c_read_mpu6050(struct i2c_client *mpu6050_client, u8 address, void *data, u32 length)
{int error = 0;u8 address_data = address;struct i2c_msg mpu6050_msg[2];/*设置读取位置msg*/mpu6050_msg[0].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址mpu6050_msg[0].flags = 0; //标记为发送数据mpu6050_msg[0].buf = &address_data; //写入的首地址mpu6050_msg[0].len = 1; //写入长度/*设置读取位置msg*/mpu6050_msg[1].addr = mpu6050_client->addr; //mpu6050在 iic 总线上的地址mpu6050_msg[1].flags = I2C_M_RD; //标记为读取数据mpu6050_msg[1].buf = data; //读取得到的数据保存位置mpu6050_msg[1].len = length; //读取长度error = i2c_transfer(mpu6050_client->adapter, mpu6050_msg, 2);if (error != 2){printk(KERN_DEBUG "\n i2c_read_mpu6050 error \n");return -1;}return 0;
}/*初始化i2c
*返回值,成功,返回0。失败,返回 -1
*/
static int mpu6050_init(struct mpu6050_dev *dev)
{
#if 0int error = 0;/*配置mpu6050*/error += i2c_write_mpu6050(dev->client, PWR_MGMT_1, 0X80);mdelay(50);error += i2c_write_mpu6050(dev->client, PWR_MGMT_1, 0X01);mdelay(50);error += i2c_write_mpu6050(dev->client, SMPLRT_DIV, 0X00); /* 输出速率是内部采样率*/ error += i2c_write_mpu6050(dev->client, GYRO_CONFIG, 0X18); /* 陀螺仪±2000dps量程 */error += i2c_write_mpu6050(dev->client, ACCEL_CONFIG, 0X18); /* 加速度计±16G量程 */ error += i2c_write_mpu6050(dev->client, CONFIG, 0X04); /* 陀螺仪低通滤波BW=20Hz */ error += i2c_write_mpu6050(dev->client, ACCEL_CONFIG2, 0X04); /* 加速度计低通滤波BW=21.2Hz */error += i2c_write_mpu6050(dev->client, PWR_MGMT_2, 0X00); /* 打开加速度计和陀螺仪所有轴 */error += i2c_write_mpu6050(dev->client, LP_MODE_CFG, 0X00); /* 关闭低功耗 */error += i2c_write_mpu6050(dev->client, INT_ENABLE, 0X01); /* 使能FIFO溢出以及数据就绪中断 */if (error < 0){/*初始化错误*/printk(KERN_DEBUG "\n mpu6050_init error \n");return -1;}return 0;
#endif
#if 1
int error = 0;/*配置mpu6050*/error += i2c_write_mpu6050(dev->client, PWR_MGMT_1, 0X01);error += i2c_write_mpu6050(dev->client, PWR_MGMT_2, 0X00);error += i2c_write_mpu6050(dev->client, SMPLRT_DIV, 0X09);error += i2c_write_mpu6050(dev->client, CONFIG, 0X06);error += i2c_write_mpu6050(dev->client, GYRO_CONFIG, 0X18); /* 陀螺仪±2000dps量程 */error += i2c_write_mpu6050(dev->client, ACCEL_CONFIG, 0X18); /* 加速度计±16G量程 */ if (error < 0){/*初始化错误*/printk(KERN_DEBUG "\n mpu6050_init error \n");return -1;}return 0;
#endif
}/*
* @description : 读取MPU6050传感器数据,可用于陀螺仪、加速度
* @param - dev : mpu6050设备
* @param - reg : 要读取的通道寄存器首地址
* @param - axis :需要读取的通道,比如x,y,z
* @param - *val : 保存读取到的值
* @return :1(IIO_VAL_INT),成功;其他值,错误
*/
static int mpu6050_sensor_show( struct mpu6050_dev *dev, int reg,int axis,int *val)
{int ind;int error=0;char data_H;char data_L;short int data = -1;ind = (axis-IIO_MOD_X) * 2;error += i2c_read_mpu6050(dev->client, reg + ind, &data_H, 1);error += i2c_read_mpu6050(dev->client, reg + ind +1, &data_L, 1);printk("%d\r\n",data);printk("%d\r\n",(int)data_H);printk("%d\r\n",(int)data_L);data =(data_H<<8) +data_L;*val = (int)data;printk("%d\r\n",*val);if(error !=0 )return -EINVAL;return IIO_VAL_INT;
}/*
* @description :读取MPU6050 陀螺仪、加速度计值
* @param -indio_dev : iio设备
* @param -chan :通道
* @param -val : 保存读取到的通道值
* @return :1(IIO_VAL_INT),成功;其他值:错误
*/
static int mpu6050_read_channel_data( struct iio_dev *indio_dev,struct iio_chan_spec const * chan,int *val)
{struct mpu6050_dev *dev = iio_priv(indio_dev);int ret = 0;switch(chan->type){case IIO_ANGL_VEL: /* 读取陀螺仪数据 */ret = mpu6050_sensor_show(dev, GYRO_XOUT_H, chan->channel2 ,val); /* channel2 为x ,y,z轴 */break;case IIO_ACCEL: /* 读取加速度计 数据 */ret = mpu6050_sensor_show(dev, ACCEL_XOUT_H, chan->channel2,val);break;default:ret = -EINVAL;}return ret;
}/** @description : 读函数,当读取sysfs中的文件的时候最终此函数会执行,此函数* :里面会从传感器里面读取各种数据,然后上传给应用。* @param - indio_dev : iio_dev* @param - chan : 通道* @param - val : 读取的值,如果是小数值的话,val是整数部分。* @param - val2 : 读取的值,如果是小数值的话,val2是小数部分。* @return : 0,成功;其他值,错误*/
static int mpu6050_read_raw(struct iio_dev *indio_dev,struct iio_chan_spec const *chan,int *val, int *val2, long mask)
{int ret = 0;int error = 0;struct mpu6050_dev *dev = iio_priv(indio_dev);unsigned char regdata = 0;printk("mpu6050_read_raw\r\n");switch (mask) {case IIO_CHAN_INFO_RAW: /*读取加速度、陀螺仪原始值*/printk("read raw data\r\n");mutex_lock(&dev->lock); /* 上锁 */ret = mpu6050_read_channel_data(indio_dev, chan, val);mutex_unlock(&dev->lock);return ret;case IIO_CHAN_INFO_SCALE:switch (chan->type){case IIO_ANGL_VEL:mutex_lock(&dev->lock);printk("read gyro scale\r\n");error = i2c_read_mpu6050(dev->client, GYRO_CONFIG, ®data, 1); if(error != 0){return -EINVAL;} regdata = (regdata & 0x18) >>3; /* 提取陀螺仪量程*/*val = 0;*val2 = gyro_scale_mpu6050[regdata];mutex_unlock(&dev->lock);return IIO_VAL_INT_PLUS_MICRO; /* 值为val + val2/1000000 */case IIO_ACCEL:printk("read accel sacle\r\n");mutex_lock(&dev->lock);error = i2c_read_mpu6050(dev->client, ACCEL_CONFIG, ®data, 1); if(error != 0){return -EINVAL;} regdata = (regdata & 0x18) >>3; /* 提取陀螺仪量程*/*val = 0;*val2 = accel_scale_mpu6050[regdata];mutex_unlock(&dev->lock);return IIO_VAL_INT_PLUS_NANO; /* 值为val + val2/1000000000 */default:return -EINVAL;}case IIO_CHAN_INFO_CALIBBIAS: /*mpu6050 加速度计和陀螺仪校准值 */switch (chan->type){case IIO_ANGL_VEL: /*陀螺仪的校准值*/printk("read gyro calibbias \r\n");mutex_lock(&dev->lock);ret = mpu6050_sensor_show(dev, XG_OFFS_USRH ,chan->channel2, val);mutex_unlock(&dev->lock);return ret;case IIO_ACCEL: /* 加速度计的校准值 */printk("read accel calibbias \r\n"); mutex_lock(&dev->lock);ret = mpu6050_sensor_show(dev, XA_OFFSET_H ,chan->channel2, val);mutex_unlock(&dev->lock); return ret;default:return -EINVAL;}return -EINVAL;}return ret;
}/*
* @description : 设置MPU6050传感器,可用于陀螺仪校准
* @param - dev : mpu6050设备
* @param - reg : 要设置的通道寄存器首地址
* @param - axis :要设置的通道,比如x,y,z
* @param - *val : 要设置的值
* @return :0,成功;其他值,错误
*/
static int mpu6050_sensor_set_1( struct mpu6050_dev *dev, int reg,int axis,int val)
{int ind;int error=0;char data_H;char data_L;ind = (axis-IIO_MOD_X) * 2;data_H = val>>8;data_L = val&0xff;error = i2c_write_mpu6050(dev->client, reg + ind, data_H);error = i2c_write_mpu6050(dev->client, reg + ind + 1, data_L);if(error !=0 )return -EINVAL;return 0;
}/*
* @description : 设置MPU6050传感器,可用于加速度计校准
* @param - dev : mpu6050设备
* @param - reg : 要设置的通道寄存器首地址
* @param - axis :要设置的通道,比如x,y,z
* @param - *val : 要设置的值
* @return :0,成功;其他值,错误
*/
static int mpu6050_sensor_set_2( struct mpu6050_dev *dev, int reg,int axis,int val)
{int ind;int error=0;char data_H;char data_L;ind = (axis-IIO_MOD_X) * 3;data_H = val>>8;data_L = val&0xff;error = i2c_write_mpu6050(dev->client, reg + ind, data_H);error = i2c_write_mpu6050(dev->client, reg + ind + 1, data_L);if(error !=0 )return -EINVAL;return 0;
}/** @description : 设置mpu6050的陀螺仪计量程(分辨率)* @param - dev : icm20608设备* @param - val : 量程(分辨率值)。* @return : 0,成功;其他值,错误*/
static int mpu6050_write_gyro_scale(struct mpu6050_dev *dev, int val)
{int result, i;u8 d;for (i = 0; i < ARRAY_SIZE(gyro_scale_mpu6050); ++i) {if (gyro_scale_mpu6050[i] == val) {d = (i << 3);result = i2c_write_mpu6050(dev->client, GYRO_CONFIG, d);if (result)return result;return 0;}}return -EINVAL;
}/** @description : 设置mpu6050的加速度计量程(分辨率)* @param - dev : mpu6050设备* @param - val : 量程(分辨率值)。* @return : 0,成功;其他值,错误*/
static int mpu6050_write_accel_scale(struct mpu6050_dev *dev, int val)
{int result, i;u8 d;for (i = 0; i < ARRAY_SIZE(accel_scale_mpu6050); ++i) {if (accel_scale_mpu6050[i] == val) {d = (i << 3);result = i2c_write_mpu6050(dev->client, ACCEL_CONFIG, d);if (result)return result;return 0;}}return -EINVAL;
}/* @description : 写函数,当向sysfs中的文件写数据的时候最终此函数会执行,一般在此函数* :里面设置传感器,比如量程等。* @param - indio_dev : iio_dev* @param - chan : 通道* @param - val : 应用程序写入的值,如果是小数值的话,val是整数部分。* @param - val2 : 应用程序写入的值,如果是小数值的话,val2是小数部分。* @param - mask : 掩码,用于指定我们读取的是什么数据* @return : 0,成功;其他值,错误*/
static int mpu6050_write_raw(struct iio_dev *indio_dev,struct iio_chan_spec const *chan,int val, int val2, long mask)
{int ret = 0;struct mpu6050_dev *dev = iio_priv(indio_dev);printk("mpu6050_write_raw\r\n");switch(mask){case IIO_CHAN_INFO_SCALE: /* 设置陀螺仪和加速度计的分辨率*/switch (chan->type){case IIO_ANGL_VEL: /* 设置陀螺仪 */mutex_lock(&dev->lock);ret = mpu6050_write_gyro_scale(dev,val2);mutex_unlock(&dev->lock);break;case IIO_ACCEL: /* 设置加速度计*/mutex_lock(&dev->lock);ret = mpu6050_write_accel_scale(dev,val2);mutex_unlock(&dev->lock);break;default:ret = -EINVAL;break;}break;case IIO_CHAN_INFO_CALIBBIAS: /* 设置陀螺仪和加速度计的校准值 */switch (chan->type){case IIO_ANGL_VEL: /* 设置陀螺仪校准值 */mutex_lock(&dev->lock);ret = mpu6050_sensor_set_1(dev, XG_OFFS_USRH, chan->channel2, val);mutex_unlock(&dev->lock);break;case IIO_ACCEL: /* 加速度计校准值 */mutex_lock(&dev->lock);ret = mpu6050_sensor_set_2(dev, XA_OFFSET_H, chan->channel2, val);mutex_unlock(&dev->lock);break;default:ret = -EINVAL;break;}break;default: ret = -EINVAL; break;}return ret;
}/** @description : 用户空间写数据格式,比如我们在用户空间操作sysfs来设置传感器的分辨率,* :如果分辨率带小数,那么这个小数传递到内核空间应该扩大多少倍,此函数就是* : 用来设置这个的。* @param - indio_dev : iio_dev* @param - chan : 通道* @param - mask : 掩码* @return : 0,成功;其他值,错误*/
static int mpu6050_write_raw_get_fmt(struct iio_dev *indio_dev,struct iio_chan_spec const *chan, long mask)
{printk("mpu6050_write_raw_get_fmt\r\n");switch (mask){case IIO_CHAN_INFO_SCALE:switch (chan->type) {case IIO_ANGL_VEL: /* 用户空间写的陀螺仪分辨率数据要乘以1000000*/return IIO_VAL_INT_PLUS_MICRO;default: /* 用户空间写的加速度计分辨率数据要乘以1000000000 */return IIO_VAL_INT_PLUS_NANO;}default:return IIO_VAL_INT_PLUS_MICRO;}return -EINVAL;
}
/** iio_info结构体变量*/
static const struct iio_info mpu6050_info = {.read_raw = mpu6050_read_raw,.write_raw = mpu6050_write_raw,.write_raw_get_fmt = &mpu6050_write_raw_get_fmt, /* 用户空间写数据格式 */
};/*----------------平台驱动函数集-----------------*/
static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{int ret;struct mpu6050_dev *dev;struct iio_dev *indio_dev;/* 1、申请iio_dev内存*/indio_dev = devm_iio_device_alloc(&client->dev,sizeof(*dev));/* 2、获取mpu6050结构体地址*/dev = iio_priv(indio_dev);dev->client =client;i2c_set_clientdata(client, indio_dev); /*保存indio_dev数据至i2c_client*/mutex_init(&dev->lock);/* 3、iio_dev的其他成员变量初始化*/indio_dev->dev.parent = &client->dev;indio_dev->info = &mpu6050_info; /*驱动开发人员编写,从用户空间读取IIO设备内部数据,最终调用的就是iio_info里面的函数*/indio_dev->name = MPU6050_NAME; indio_dev->modes = INDIO_DIRECT_MODE; /*直接模式,提供sysfs接口*/indio_dev->channels = mpu6050_channels;indio_dev->num_channels = ARRAY_SIZE(mpu6050_channels);/* 4、注册iio_dev*/ret = iio_device_register(indio_dev);if (ret <0){dev_err(&client->dev, "iio_device_register failed \n");goto err_iio_register;}mpu6050_init(dev); /*初始化MPU6050*/printk("iio_device_register successfully\r\n");return 0;
err_iio_register:return ret;
}static int mpu6050_remove(struct i2c_client *client)
{struct iio_dev *indio_dev = i2c_get_clientdata(client);struct ap3216c_dev *dev;dev = iio_priv(indio_dev);/* 2、注销IIO */iio_device_unregister(indio_dev);return 0;
}/*定义ID 匹配表*/
static const struct i2c_device_id gtp_device_id[] = {{"kun,i2c_mpu6050", 0},{}};/*定义设备树匹配表*/
static const struct of_device_id mpu6050_of_match_table[] = {{.compatible = "kun,i2c_mpu6050"},{/* sentinel */}};/*定义i2c总线设备结构体*/
struct i2c_driver mpu6050_driver = {.probe = mpu6050_probe,.remove = mpu6050_remove,.id_table = gtp_device_id,.driver = {.name = "kun,i2c_mpu6050",.owner = THIS_MODULE,.of_match_table = mpu6050_of_match_table,},
};/*
*驱动初始化函数
*/
static int __init mpu6050_driver_init(void)
{int ret;pr_info("mpu6050_driver_init\n");ret = i2c_add_driver(&mpu6050_driver);return ret;
}/*
*驱动注销函数
*/
static void __exit mpu6050_driver_exit(void)
{pr_info("mpu6050_driver_exit\n");i2c_del_driver(&mpu6050_driver);
}module_init(mpu6050_driver_init);
module_exit(mpu6050_driver_exit);MODULE_LICENSE("GPL");mpu6050.h
#ifndef MPU6050_H
#define MPU6050_H//宏定义
/* 陀螺仪静态偏移 */
#define XG_OFFS_USRH 0x13
#define XG_OFFS_USRL 0x14
#define YG_OFFS_USRH 0x15
#define YG_OFFS_USRL 0x16
#define ZG_OFFS_USRH 0x17
#define ZG_OFFS_USRL 0x18#define SMPLRT_DIV 0x19
#define CONFIG 0x1A
#define GYRO_CONFIG 0x1B
#define ACCEL_CONFIG 0x1C
#define ACCEL_CONFIG2 0x1D
#define LP_MODE_CFG 0x1E
#define INT_ENABLE 0x38
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B
#define PWR_MGMT_2 0x6C
#define WHO_AM_I 0x75/*加速度静态偏移*/
#define XA_OFFSET_H 0x77
#define XA_OFFSET_L 0x78
#define YA_OFFSET_H 0x7A
#define YA_OFFSET_L 0x7B
#define ZA_OFFSET_H 0x7D
#define ZA_OFFSET_L 0x7E#define SlaveAddress 0xD0
#define Address 0x68 //MPU6050地址
#define I2C_RETRIES 0x0701
#define I2C_TIMEOUT 0x0702
#define I2C_SLAVE 0x0703 //IIC从器件的地址设置
#define I2C_BUS_MODE 0x0780#endif
mpu6050App.c
/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : icm20608.c
作者 : 左忠凯
版本 : V1.0
描述 : icm20608设备iio框架测试程序。
其他 : 无
使用方法 :./icm20608App
论坛 : www.openedv.com
日志 : 初版V1.0 2021/8/17 左忠凯创建
***************************************************************/
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "sys/ioctl.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include <poll.h>
#include <sys/select.h>
#include <sys/time.h>
#include <signal.h>
#include <fcntl.h>
#include <errno.h>/* 字符串转数字,将浮点小数字符串转换为浮点数数值 */
#define SENSOR_FLOAT_DATA_GET(ret, index, str, member)\ret = file_data_read(file_path[index], str);\dev->member = atof(str);\
/* 字符串转数字,将整数字符串转换为整数数值 */
#define SENSOR_INT_DATA_GET(ret, index, str, member)\ret = file_data_read(file_path[index], str);\dev->member = atoi(str);\
/* icm20608 iio框架对应的文件路径 */
static char *file_path[] = {"/sys/bus/iio/devices/iio:device0/in_accel_scale","/sys/bus/iio/devices/iio:device0/in_accel_x_calibbias","/sys/bus/iio/devices/iio:device0/in_accel_x_raw","/sys/bus/iio/devices/iio:device0/in_accel_y_calibbias","/sys/bus/iio/devices/iio:device0/in_accel_y_raw","/sys/bus/iio/devices/iio:device0/in_accel_z_calibbias","/sys/bus/iio/devices/iio:device0/in_accel_z_raw","/sys/bus/iio/devices/iio:device0/in_anglvel_scale","/sys/bus/iio/devices/iio:device0/in_anglvel_x_calibbias","/sys/bus/iio/devices/iio:device0/in_anglvel_x_raw","/sys/bus/iio/devices/iio:device0/in_anglvel_y_calibbias","/sys/bus/iio/devices/iio:device0/in_anglvel_y_raw","/sys/bus/iio/devices/iio:device0/in_anglvel_z_calibbias","/sys/bus/iio/devices/iio:device0/in_anglvel_z_raw",
};/* 文件路径索引,要和file_path里面的文件顺序对应 */
enum path_index {IN_ACCEL_SCALE = 0,IN_ACCEL_X_CALIBBIAS,IN_ACCEL_X_RAW,IN_ACCEL_Y_CALIBBIAS,IN_ACCEL_Y_RAW,IN_ACCEL_Z_CALIBBIAS,IN_ACCEL_Z_RAW,IN_ANGLVEL_SCALE,IN_ANGLVEL_X_CALIBBIAS,IN_ANGLVEL_X_RAW,IN_ANGLVEL_Y_CALIBBIAS,IN_ANGLVEL_Y_RAW,IN_ANGLVEL_Z_CALIBBIAS,IN_ANGLVEL_Z_RAW,
};/** icm20608数据设备结构体*/
struct icm20608_dev{int accel_x_calibbias, accel_y_calibbias, accel_z_calibbias;int accel_x_raw, accel_y_raw, accel_z_raw;int gyro_x_calibbias, gyro_y_calibbias, gyro_z_calibbias;int gyro_x_raw, gyro_y_raw, gyro_z_raw;float accel_scale, gyro_scale, temp_scale;float gyro_x_act, gyro_y_act, gyro_z_act;float accel_x_act, accel_y_act, accel_z_act;
};struct icm20608_dev icm20608;/** @description : 读取指定文件内容* @param - filename : 要读取的文件路径* @param - str : 读取到的文件字符串* @return : 0 成功;其他 失败*/
static int file_data_read(char *filename, char *str)
{int ret = 0;FILE *data_stream;data_stream = fopen(filename, "r"); /* 只读打开 */if(data_stream == NULL) {printf("can't open file %s\r\n", filename);return -1;}ret = fscanf(data_stream, "%s", str);if(!ret) {printf("file read error!\r\n");} else if(ret == EOF) {/* 读到文件末尾的话将文件指针重新调整到文件头 */fseek(data_stream, 0, SEEK_SET); }fclose(data_stream); /* 关闭文件 */ return 0;
}/** @description : 获取ICM20608数据* @param - dev : 设备结构体* @return : 0 成功;其他 失败*/
static int sensor_read(struct icm20608_dev *dev)
{int ret = 0;char str[50];/* 1、获取陀螺仪原始数据 */SENSOR_FLOAT_DATA_GET(ret, IN_ANGLVEL_SCALE, str, gyro_scale);SENSOR_INT_DATA_GET(ret, IN_ANGLVEL_X_RAW, str, gyro_x_raw);SENSOR_INT_DATA_GET(ret, IN_ANGLVEL_Y_RAW, str, gyro_y_raw);SENSOR_INT_DATA_GET(ret, IN_ANGLVEL_Z_RAW, str, gyro_z_raw);/* 2、获取加速度计原始数据 */SENSOR_FLOAT_DATA_GET(ret, IN_ACCEL_SCALE, str, accel_scale);SENSOR_INT_DATA_GET(ret, IN_ACCEL_X_RAW, str, accel_x_raw);SENSOR_INT_DATA_GET(ret, IN_ACCEL_Y_RAW, str, accel_y_raw);SENSOR_INT_DATA_GET(ret, IN_ACCEL_Z_RAW, str, accel_z_raw);/* 3、转换为实际数值 */dev->accel_x_act = dev->accel_x_raw * dev->accel_scale;dev->accel_y_act = dev->accel_y_raw * dev->accel_scale;dev->accel_z_act = dev->accel_z_raw * dev->accel_scale;dev->gyro_x_act = dev->gyro_x_raw * dev->gyro_scale;dev->gyro_y_act = dev->gyro_y_raw * dev->gyro_scale;dev->gyro_z_act = dev->gyro_z_raw * dev->gyro_scale;return ret;
}/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int ret = 0;if (argc != 1) {printf("Error Usage!\r\n");return -1;}while (1) {ret = sensor_read(&icm20608);if(ret == 0) { /* 数据读取成功 */printf("\r\n原始值:\r\n");printf("gx = %d, gy = %d, gz = %d\r\n", icm20608.gyro_x_raw, icm20608.gyro_y_raw, icm20608.gyro_z_raw);printf("ax = %d, ay = %d, az = %d\r\n", icm20608.accel_x_raw, icm20608.accel_y_raw, icm20608.accel_z_raw);printf("实际值:");printf("act gx = %.2f°/S, act gy = %.2f°/S, act gz = %.2f°/S\r\n", icm20608.gyro_x_act, icm20608.gyro_y_act, icm20608.gyro_z_act);printf("act ax = %.2fg, act ay = %.2fg, act az = %.2fg\r\n", icm20608.accel_x_act, icm20608.accel_y_act, icm20608.accel_z_act);}usleep(100000); /*100ms */}return 0;
}文件下载地址:https://download.csdn.net/download/weixin_42963900/88606223

![web:[GXYCTF2019]BabyUpload(文件上传、一句话木马、文件过滤)](https://img-blog.csdnimg.cn/direct/95821fd72ebd4e88b38f01512cf12820.png)