前言
随着电脑和手机硬件性能越来越高,游戏越来越追求大世界,而大世界非常核心的一环是植被,目前UE5引擎提供给植被生成的主流两种方式为 手刷植被和LandscapeGrass(WeightMap程序化植被)。当然UE5.3推出新一代PCGFramework 节点程序化生成框架,也可以用于植被生成。(本文暂不涉及到PCGFramework), 主要分析LandscapeGrass方案。
手刷植被
手刷植被是比较传统的植被生成方式,基本各种引擎都会提供植被编辑器让美术人力刷植被,这里倒是没什么好分析的。UE5提供了手刷植被模式FoliageMode, 工具比较齐全,比较易用,能让场景美术高效率手工刷植被。FoliageMode生成的植被是用HISM组件管理,不明白的可以看看我的另外一篇博客(UE4 4.27) UHierarchicalInstancedStaticMesh(HISM)原理分析

LandscapeGrass(WeightMap程序化植被)
背景
weightmap程序化植被, 顾名思义: 由地形weightmap程序化生成的植被。首先地形WeightMap的概念,说白了就是地形材质混合的权重图,不懂的可以看下UE地形系统材质混合实现和Shader生成分析(UE5 5.2)。场景美术在地形上频繁刷了各种材质,比如草原或者沙漠,然后需要再相应的地貌上种植相应植被,比如草原种绿草,沙漠种仙人掌,因为地形的材质层是频繁改动,每次刷完草或者沙漠后,又得用FoliageMode 在相应地貌刷植被,两重工作量,而且容易遗忘,这时候就非常需要一种工具: 在相应的WeightMap上程序化铺满一种或许多种植被,每次刷完WeightMap后地形可以自动生成。UE引擎 就有这样一套方案,叫LandscapeGrass
LandscapeGrass使用简介
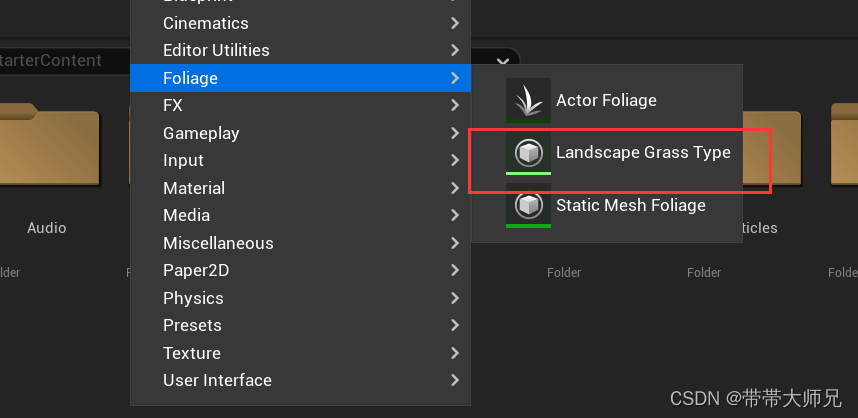
配置LandscapeGrassType

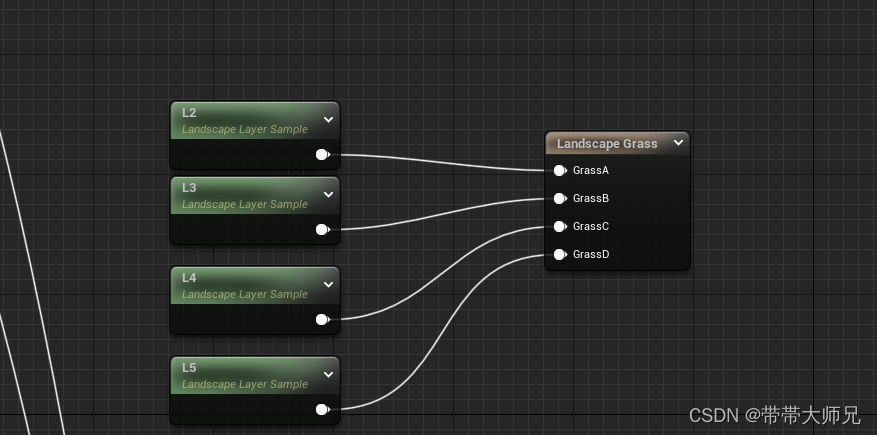
材质Grass采样层配置
显示结果

LandscapeGrass生成分析
LandscapeGrass UML图

LandscapeGrass执行流程图

这里重点介绍RenderGrassMap,GrassInstancedStaticMeshComponent, FAsyncGrassTask.
这里的三个过程都是逐组件的,针对单独一个Landscapecomponent进行
RenderGrassMap(Per LandscapeComponent)
GrassMap本质就是一张图集(TextureAltas)
这里是将LandscapeComponent的HeightMap和Grass用到的所有WeightMap(也就是上面的L2,L3,L4,L5)合并到一张图集里,格式为PF_B8G8R8A8,也就是所谓的RenderGrassMap。
假设一个Landscapecomponent 分辨率为128,一张HeightMap占16位,一张WeightMap占8位, 由于上面使用了L2,L3,L4,L5四个草权重层,则 (2 + 4)/ 4 = 1.5, 得使用两张128 * 128,合起来(128 * 2)* 128 = 256 * 128,这就是RenderGrassMap图集。
GrassMap创建



Render GrassMap
通过DrawLandscapeComponentMesh,设置Ortho正交相机, 进行多次RenderPass, 将HeightMap和WeightMap写入到GrassMap图集里。一次RenderPass写入4个8位通道,6个8位通道就是需要两次RenderPass.
核心代码:
FLandscapeGrassWeightVS,FLandscapeGrassWeightPS, FLandscapeGrassWeightMeshProcessor等文件


" grass.CaptureNextGrassUpdate 1 " 可以对RenderGrassMap进行Renderdoc抓帧
GrassMap fetch成cpu数据
上一步生成了GrassMap 图集,里面存储了LandscapeComponent地块的HeightMap数据和所有的Grass相关的WeightMap数据。最终直接对GrassMap进行CPU ReadBack,读取数据出来,合并到FLandscapeComponentGrassData的 TArray<uint8> HeightWeightData里。HeightWeightData按顺序分段存储了高度数据和所有的Grass各层权重数据。


为什么需要Render GrassMap
回过头来看RenderGrassMap存在的意义是因为UE引擎地形的各个LandscapeComponent共用了HeightMap和WeightMap, RenderGrassMap就是把每个组件的HeightData和GrassWeightData从公用纹理抽离出来,存到LandscapeComponent里,方便每个LandscapeComponent生成自己的GrassInstancedStaticMeshComponent.
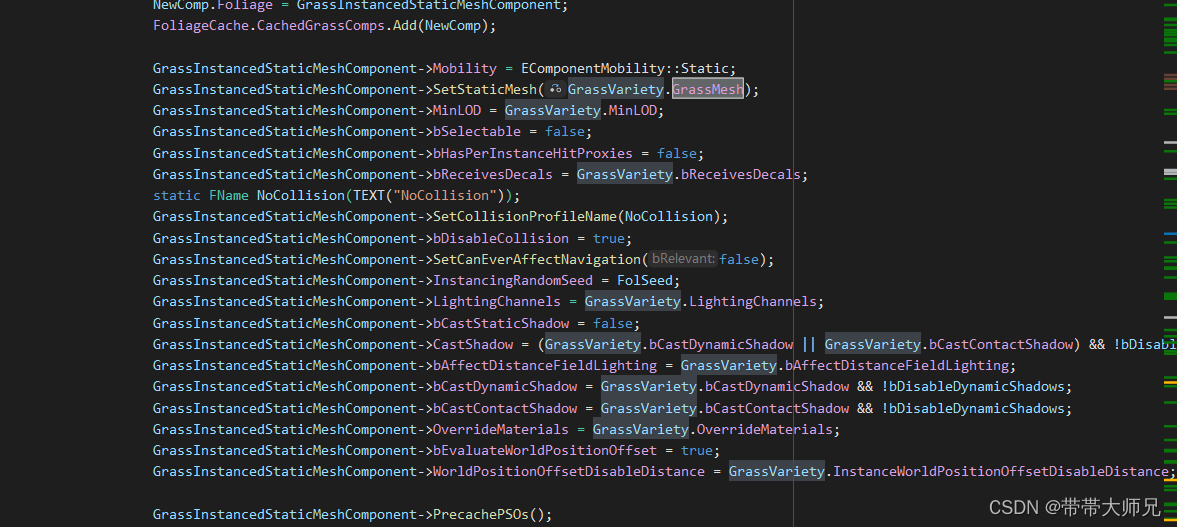
GrassInstancedStaticMeshComponent
GrassInstancedStaticMeshComponent继承于HISM组件,两者基本没什么区别。这里需要强调的是一个GSMC组件针对一个LandcapeComponent的LandscapeGrassType的GrassVariety来创建的。
FAsyncGrassTask(随机撒点和HISM构建)
LandscapeComponent已经获取高度和权重数据,下面就是进行随机撒点。FAsyncGrassTask
随机撒点
撒点密度由LandscapeComponent地块大小和GrassVariety的密度决定
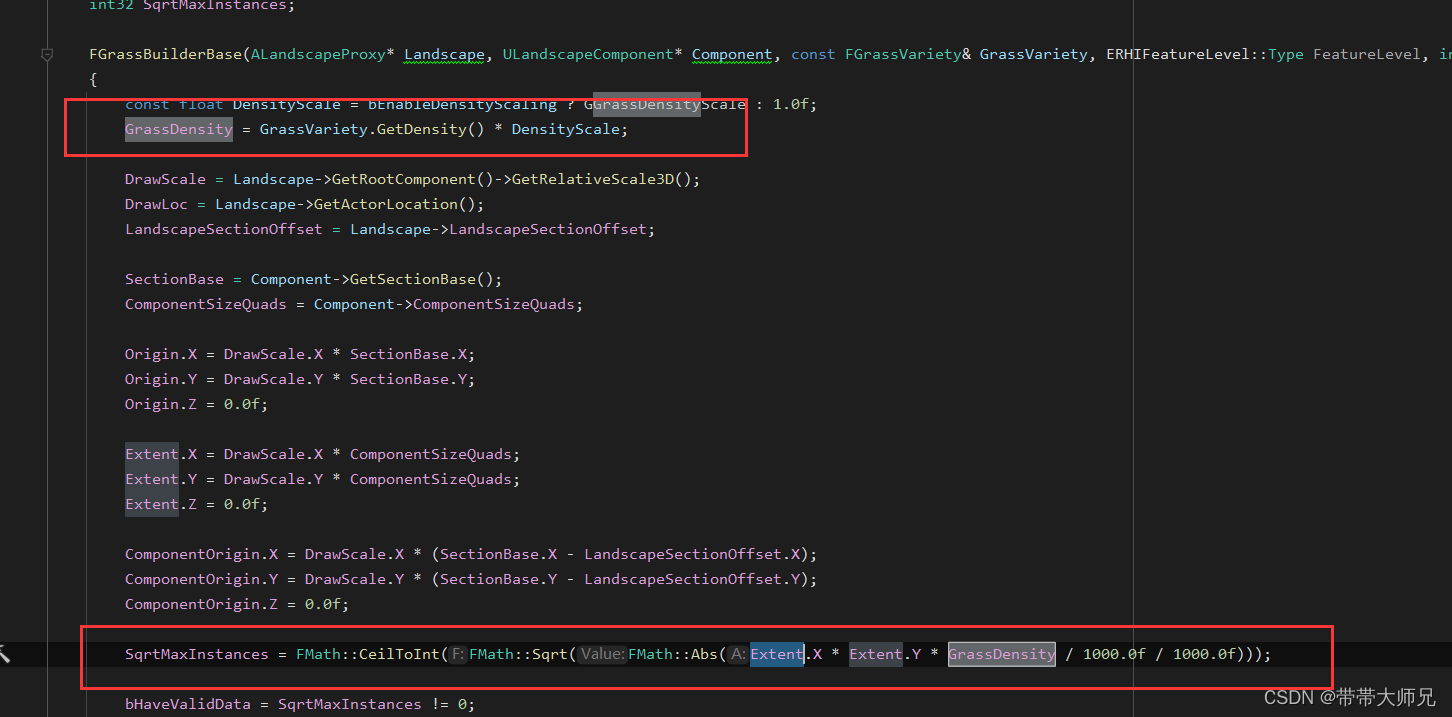
FAsyncGrassBuilder封装了随机撒点的核心算法, 目前一共提供了两种随机撒点算法: JitterGrid和 Halto序列
勾选了UseGrid就是使用了JitterGrid随机撒点,反之使用Halto随机撒点。

JitterGrid
JitterGrid也就是根据密度把整个地形块均分切成多个块,每个块内随机生成一个二维点,并且加上一定的旋转和位置偏移,最终得到一个随机点。具体算法参考我之前一篇博客: 程序化物件放置(procedural placement)之泊松硬盘采样(poisson disk sampling)

一个随机点虽然生成出来了,但是是否存活得满足一定条件:

可以看出当权重为0,百分百不通过。权重为1时,通过率是百分百,如果权重为其它,那就看随机的运气了。
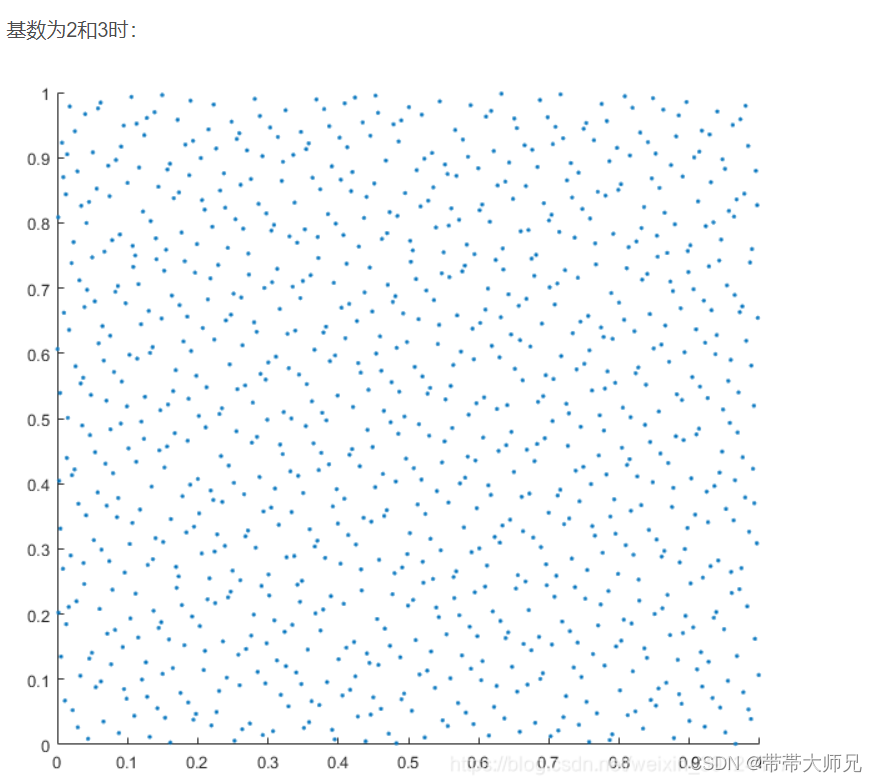
Halto序列
Halto随机数生成参考 应用halton序列生成均匀散点图
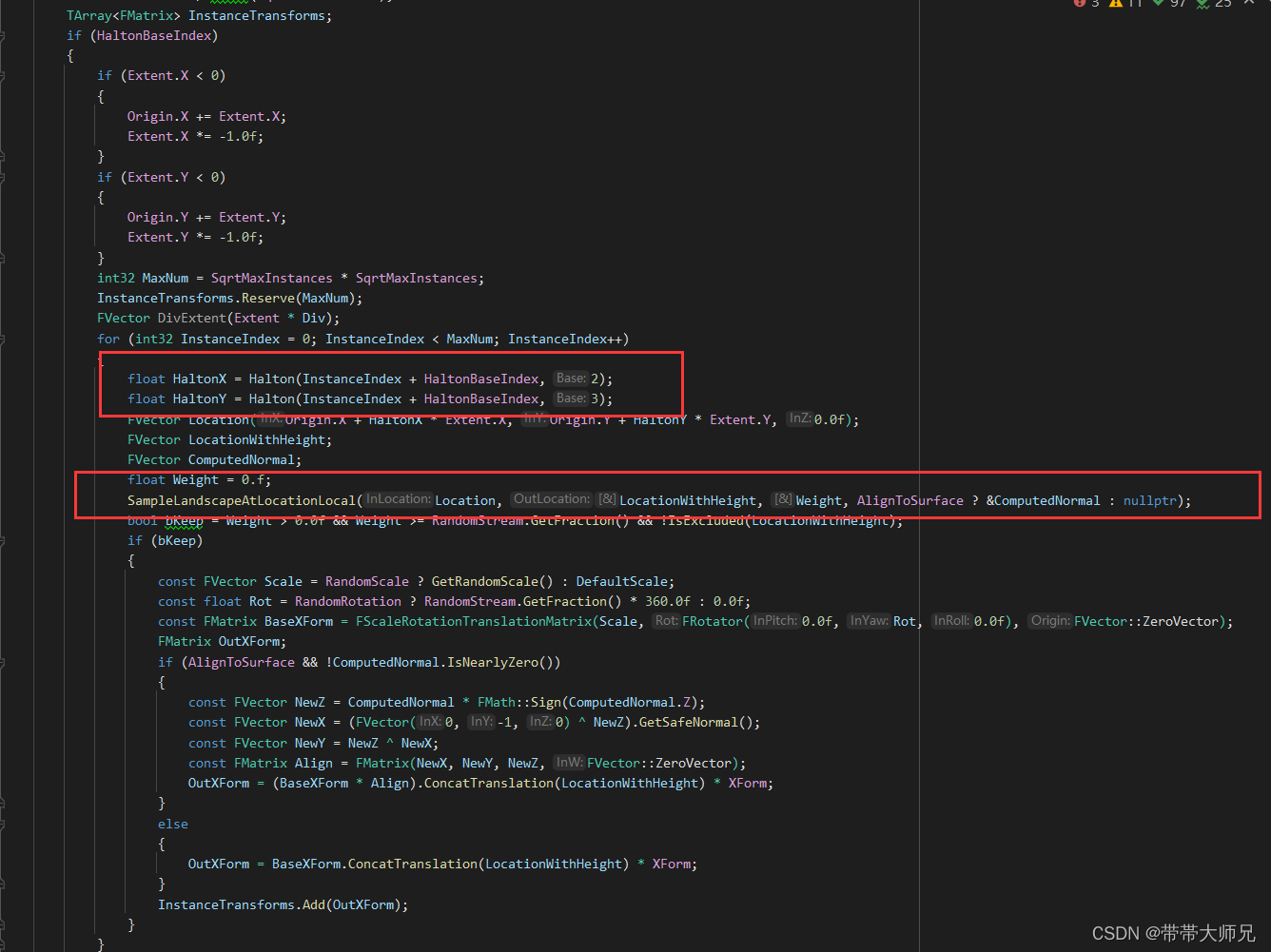
Halto序列生成的随机点存活条件判断和JitterGrid是一样的。比较注意的是,JitterGrid和Halto序列生成的随机点都是二维的,都需要进行一次SampleHeight来得到高度位置Z,Sample方法是 Bilinear interpolates。
撒完点后最终进行HISM构建。
FoliageMode和LandscapeGrass的区别
未完待续
参考文章
[1] UE地形系统材质混合实现和Shader生成分析(UE5 5.2)
[2] (UE4 4.27) UHierarchicalInstancedStaticMesh(HISM)原理分析
[3] 应用halton序列生成均匀散点图
[4] 源码文件:LandscapeGrass.cpp