经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.6 雷达设计考虑
上述部分给出了汽车雷达基本原理的简要概述。在雷达系统的设计中,有几个方面是必不可少的,它们决定了雷达系统的关键性能。在本节中,FMCW雷达将作为一个例子来讨论这些设计考虑。
2.6.1 灵敏度
雷达的灵敏度定义了在特定PFA和PD下可以成功探测到的来自目标的最弱回波。在以上章节中,我们分别介绍了信号模型和噪声模型。有了这些模型,雷达系统设计者将能够在发展的早期阶段预测雷达的灵敏度。
灵敏度的分析从雷达距离方程(2.21)开始。假设接收信道的总增益为Gs,其中包括放大器的增益、下变频混频器和基带放大器的损耗/增益。基带上的信号功率为
 (2.101)
(2.101)
另一方面,由式(2.34)可知基带上的噪声功率为
![]() (2.102)
(2.102)
因此,信噪比可以由下式获得
 (2.103)
(2.103)
式中,Gsp为信号处理增益,Lsp为信号处理损耗。βn近似于ADC前抗混叠滤波器的BW。对于FMCW雷达来说,Gsp主要来自于“快时间”和“慢时间”的DFT。对距离-多普勒处理,信号处理总增益Gsp = N*M,其中N为“快时间”的DFT大小,M为“慢时间”的DFT大小,也分别称为距离和多普勒单元数。对于Lsp,其中一个原因是在DFT之前对数据加了窗函数。
对于汽车雷达的设计,通常针对具体情况提供要求。例如,某汽车制造商需要前视雷达来支持其自动紧急制动功能,这就要求雷达在一定范围内检测到行人,且检测概率大于50% (PD > 0.5),虚警率PFA = 1 * 10 -4。行人通常被认为是一个Swerling I的目标。从表2.6中可以看出,在没有积累的情况下,实现PD = 0.5和PFA = 1 * 10 -4的Swerling I目标的最小信噪比是SNRmin = 10.89 dB。因此,最大探测距离为
 (2.104)
(2.104)
雷达设计人员的主要任务之一是在(2.105)中的参数之间找到一个良好的平衡。kT0是常数,λ是由工作频率决定的,它也可以看作是一个常数。发射功率P t和噪声系数NF通常由雷达收发芯片决定,通常受到制造工艺的限制。Gt和Gr依赖于天线设计,还需要考虑最大天线增益和波束覆盖(天线波束宽度)之间的权衡。βn、Gsp和Lsp是与雷达波形设计和数字信号处理相关的参数。利用积累可以降低最小信噪比,从而提高最大探测距离。然而,集成也需要更多的处理。
2.6.2 距离/多普勒覆盖
雷达的距离覆盖可以从(2.46)到(2.105)确定。由式(2.46)可知,当fp = fs,采用I/Q基带时,最大距离为:
 (2.105)
(2.105)
这个最大范围是基于波形和采样率,而不考虑灵敏度。使用单通道基带(没有I/Q基带),最大范围减少了一半:
 (2.106)
(2.106)
因此,雷达的实际距离覆盖应该为
 (2.107)
(2.107)
或
 (2.108)
(2.108)
对于单通道基带。
对于多普勒覆盖,最大速度可以从式(2.79)计算当,ξp=M
 (2.109)
(2.109)
Vmax也被称为最大无模糊速度,因为Vmax之外的速度被折叠到(速度)区间中。
2.6.3 距离/多普勒分辨率
雷达的目标分辨率是它区分距离或多普勒非常近的目标的能力。对于FMCW雷达,目标的距离可以从(2.69)得到。距离分辨率ΔR是两个相邻距离单元之间的差:
 (2.110)
(2.110)
 (2.111)
(2.111)
由于N/fs=T0,距离分辨率可以推导为
 (2.112)
(2.112)
类似距离分辨率,多普勒(速度)分辨率ΔV能从(2.79)获得:
 (2.113)
(2.113)
 (2.114)
(2.114)
值得注意的是,由式(2.112)和式(2.114)推导出的ΔR和ΔV是一种理想条件,包括相同大小、高信噪比、矩形窗口的点目标。在实际情况下,距离和多普勒分辨率会受到各种因素的影响。例如,如果目标的大小不同,则更难以区分较小的目标和较大的目标。另一个例子是,在距离-多普勒处理中可以使用某些窗函数来获得合理的副瓣电平,这通常会增加主瓣宽度,降低距离和多普勒分辨率[30]。
2.6.4 相位噪声
一个完美的正弦波只能在教科书中找到。相位和频率的不稳定性在所有天然和人造振荡器中都是允许的。这些不稳定性被称为相位噪声。相位噪声与材料、结构设计以及振荡器中的随机噪声现象有关。图2.28(a)显示了一个普通振荡器的频谱,其中f0为中心或载波频率。相位噪声的功率随着频偏fa的增大而减小。频谱的相位噪声部分可以分为两部分,即近载波相位噪声和远载波相位噪声。对于汽车雷达,通常使用锁相环来合成波形。图2.28(b)显示了锁相环的典型频谱。在图2.28(b)中可以看到一个基座,这是由于基于锁相环的合成器具有有限环路BW,或者由于系统中使用的倍频器链的有限BW用于倍频。参考文献[31-33]详细分析了噪声基座在倍频作用下的行为。

图2.28 雷达信号源频谱(a)一般振荡器的频谱(b)包括噪声基座的合成信号发生器的频谱
在雷达的接收信道中,混频器可以增加或消除接收信号中的相位噪声。相位噪声的消除发生在两个输入信号是相干的情况下,即两个输入信号之间具有确定的相位关系。在其他工作中,混频器的输入信号来自同一参考源。在汽车雷达系统中,混频器将发射信号与延时副本混合,产生如下相位噪声去相关[34,35]:
![]() (2.115)
(2.115)
相位噪声去相关系数为![]() ,如(2.115)所示。可以看出,当δt = 0时,相位噪声可以完全消除。随着δt的增大,
,如(2.115)所示。可以看出,当δt = 0时,相位噪声可以完全消除。随着δt的增大,![]() 呈现周期性。
呈现周期性。
为了更好地说明相位噪声对汽车雷达的影响,采用雷达收发器的相位噪声实测数据进行仿真。图2.29是测量到的相位噪声。从图中可以清楚地看到相位噪声基座。仿真的距离分布图如图2.30和2.31所示,目标位置分别为80 m和150 m。距离分布是128个chirp的平均值,以获得噪声底的形状。如(2.115)所示,相位噪声在距离分布中引入肩带。肩带随着目标距离的增加而升高,而去相关度随着δt的增加而增加。在汽车雷达应用中,更高的肩带意味着更小的动态范围。在这种情况下,可能无法检测到大目标旁边的小目标。例如,汽车前面的行人可能会被相位噪声肩带掩盖。因此,雷达信号发生器必须具有低相位噪声才能保持足够的动态范围。

图2.29 雷达发射机测量到的相位噪声示例

图2.30 80m处目标的距离分布

图2.30 150m处目标的距离分布
2.6.5 Chirp非线性
汽车雷达测距的另一个主要干扰是chirp非线性。理想的FMCW雷达具有完美的线性chirp,可以表示为
f(t) = fc + Kt (2.116)
K是chirp的斜率。然而,实际信号合成器中总是存在频率偏差。图2.32显示了一个与理想线性chirp相比有轻微偏差的24 GHz chirp示例。

图2.32 一个非线性chirp
基带频率和目标距离精度取决于频率斜坡中非线性的类型。因此,chirp非线性带来的影响应该逐个评估。例如,文献[36]中描述了具有正弦偏差的非线性频率斜坡的影响。在文献[37]中,评估了FMCW雷达中自由运行的压控振荡器的平方偏差。由于难以解析地确定chirp非线性的影响,雷达设计人员通常将测量和仿真相结合来分析chirp非线性的影响。现代先进的信号和频谱分析仪器,如Keysight 89,601BHPC和罗德与施瓦茨FSW信号和频谱分析仪,提供了直接测量瞬时波形频率关系的能力。因此,雷达设计人员可以利用雷达仿真中测量到的波形来评估非线性所造成的影响。
对于图2.32中测量的波形,可以使用一般的连续波发射信号(2.13)从频率与时间的瞬态波形创建时域发射信号。根据感兴趣的距离,可以在(2.42)中应用一定的时间延迟来获得基带信号进行评估。仿真距离分布示例如图2.33所示,其中三个目标分别位于30、95和200 m处,RCS值不同。非线性的影响在图2.33中很明显,随着距离的增加,目标波束的宽度会变宽,这会降低距离识别和距离精度。信噪比在较长的距离也有更多的下降。因此,在汽车雷达设计中,有一个良好的线性chirp是至关重要的,以保持雷达的性能在整个距离覆盖。
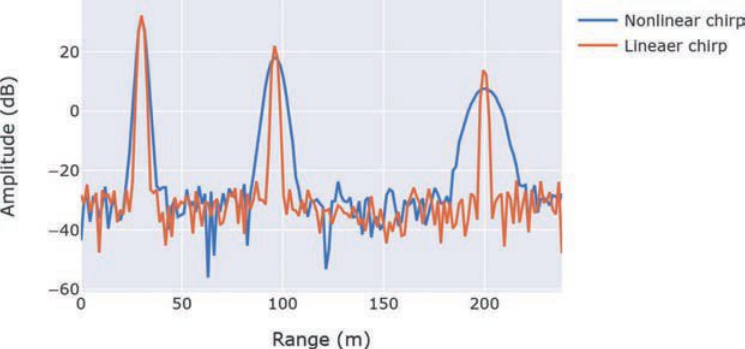
图2.33 非线性chirp目标的距离分布