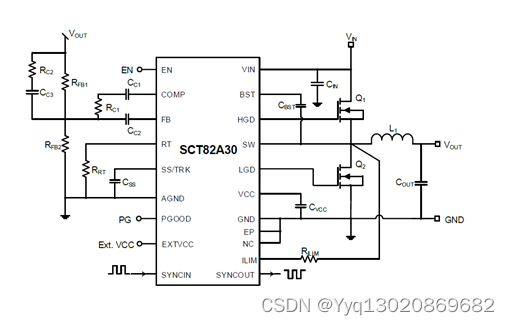
一.硬件原理图

分析:
该交换芯片支持I2C、SPI、mdio通信,但是看ast1520的uboot代码采用的是mdio去通信phy芯片的,所以暂时也先采用mdio的方式,需要配置相应的引脚才可以配置成mdio通信模式,具体的配置硬件工程师解决。
背景:
RTL8306M芯片上可能没有提供MDC/MDIO接口,可以通过GPIO(General Purpose Input/Output)来模拟,GPIO可实现串行输入输出,且一般CPU上会提供很多GPIO接口供用户自定义使用。每组SMI需要两个GPIO口分别来模拟MDC和MDIO,首先需要保证这两个GPIO口不作其他用途,且相应的复用模式设置为GPIO模式。
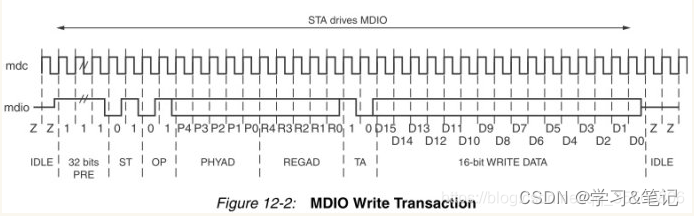
二.SMI[MDC/MDIO]协议
SMI:串行管理接口(Serial Management Interface),通常直接被称为MDIO接口(Management Data Input/Output Interface)。MDIO最早在IEEE 802.3的第22卷定义,后来在第45卷又定义了增强版本的MDIO,其主要被应用于以太网的MAC和PHY层之间,用于MAC层器件通过读写寄存器来实现对PHY层器件的操作与管理。
MDIO接口包括两条线,MDIO和MDC,其中MDIO是双向数据线,而MDC是由STA驱动的时钟线。MDC时钟的最高速率一般为2.5MHz,MDC也可以是非固定频率,甚至可以是非周期的。MDIO接口只是会在MDC时钟的上升沿进行采样,而并不在意MDC时钟的频率(类似于I2C接口)。MDIO是一个PHY的管理接口,用来读/写PHY的寄存器,以控制PHY的行为或获取PHY的状态,MDC为MDIO提供时钟。
MAC读取PHY的寄存器:

MAC向PHY的寄存器写入数据:
三.代码实现
原厂提供了芯片RTL8306M的读写逻辑,需要自己实现gpio模拟MDC/MDIO和驱动入口。
Kconfig:
config RTL8309tristate "RTL8309 driver"default mhelpEnable this driver will support network switch controlMakefile:
# SPDX-License-Identifier: GPL-2.0-only
#
# Makefile for the Realtek network device drivers.
#obj-$(CONFIG_RTL8309) += rtl8309.o
rtl8309-objs := rtl8309_main.o mdcmdio.o rtk_api.o rtl8309n_asicdrv.DTS配置:
rtl_8309: rtl-8309{status ="okay";compatible = "rtl8309";pinctrl-names = "default";pinctrl-0 = <&rtl8309_mdio_pin&rtl8309_mdc_pin>;rtl8309-mdio-gpios = <&gpio3 RK_PC3 GPIO_ACTIVE_HIGH>;rtl8309-mdc-gpios = <&gpio3 RK_PC2 GPIO_ACTIVE_HIGH>;};rtl-8309 {rtl8309_mdio_pin:rtl8309-mdio-gpios{rockchip,pins = <3 RK_PC3 RK_FUNC_GPIO &pcfg_pull_up>;};rtl8309_mdc_pin:rtl8309-mdc-gpios{rockchip,pins = <3 RK_PC2 RK_FUNC_GPIO &pcfg_pull_up>;};};实现一个杂散类设备RTL8306M:
#include <linux/miscdevice.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/fs.h>
#include <linux/i2c-dev.h>
#include <linux/i2c.h>
#include <linux/init.h>
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/notifier.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
#include <linux/compat.h>
#include <linux/printk.h>
#include <linux/kobject.h>
#include <linux/version.h>
#include <linux/kthread.h>
#include <linux/gpio.h>
#include <linux/of_gpio.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/platform_device.h>#include "rtk_api.h"
#include "rtl8309_main.h"#include <linux/delay.h>#define DRIVER_NAME "RTL8309"#define RTL8309_DEBUG 1
#if RTL8309_DEBUG
#define DBG(format, args...) \printk(KERN_DEBUG "%s: " format, DRIVER_NAME, ##args)
#define ERR(format, args...) \printk(KERN_ERR "%s: " format, DRIVER_NAME, ##args)
#define WARNING(format, args...) \printk(KERN_WARN "%s: " format, DRIVER_NAME, ##args)
#define INFO(format, args...) \printk(KERN_INFO "%s: " format, DRIVER_NAME, ##args)
#else
#define DBG(format, args...)
#define ERR(format, args...)
#define WARNING(format, args...)
#define INFO(format, args...)
#endif#define LINK_UP 1
#define LINK_DOWN 2
#define LINK_UNKNOW 3int PRE_PORT_STATUS[5]={0,0,0,0,0};struct rtl8309_dev {struct device *dev;struct device sys_dev;struct gpio_desc *rtl8309_mdio;struct gpio_desc *rtl8309_mdc;struct delayed_work check_status_work;struct mutex status_lock;u32 link_status;
};struct rtl8309_dev *g_rtl8309;
struct rtl8309_dev *rtl8309;void setGpioDirection(int gpio, uint32_t dir)
{if(gpio == IST_GPIO_RTL8309_MDIO){if(dir){gpiod_direction_output(g_rtl8309->rtl8309_mdio,1);}else{gpiod_direction_input(g_rtl8309->rtl8309_mdio);}}else if(gpio == IST_GPIO_RTL8309_MDC){if(dir){gpiod_direction_output(g_rtl8309->rtl8309_mdc,1);}else{gpiod_direction_input(g_rtl8309->rtl8309_mdc);}}
}void setGpioOutput(int gpio, uint32_t out )
{if(gpio == IST_GPIO_RTL8309_MDIO){gpiod_set_value(g_rtl8309->rtl8309_mdio, out);}else if(gpio == IST_GPIO_RTL8309_MDC){gpiod_set_value(g_rtl8309->rtl8309_mdc, out);}
}void getGpioInput(int gpio,uint32_t *in)
{if(gpio == IST_GPIO_RTL8309_MDIO){*in = gpiod_get_value(g_rtl8309->rtl8309_mdio);}else if(gpio == IST_GPIO_RTL8309_MDC){*in = gpiod_get_value(g_rtl8309->rtl8309_mdc);}
}static long rtl8309_ioctl(struct file *file, uint32_t cmd, unsigned long arg)
{return 0;
}static ssize_t rtl8309_write(struct file *file, const char __user *buf,size_t size, loff_t *ppos)
{return 1;
}static ssize_t rtl8309_read(struct file *file, char __user *buf, size_t size,loff_t *ppos)
{return 1;
}static void check_link_status(struct work_struct *work)
{struct delayed_work *dwork = to_delayed_work(work);struct rtl8309_dev *rtl8309 =container_of(dwork, struct rtl8309_dev, check_status_work);int PORT_ENABLE[5]={0,1,0,1,0};int PORT_STATUS[5]={0,0,0,0,0};int status = 0;int i = 0;rtk_port_linkStatus_t pLinkStatus = PORT_LINKDOWN;rtk_port_speed_t pSpeed = PORT_SPEED_10M;rtk_port_duplex_t pDuplex = PORT_HALF_DUPLEX;mutex_lock(&rtl8309->status_lock);for(i=0;i<5;i++){if(PORT_ENABLE[i] == 1){if(rtk_port_phyStatus_get((rtk_port_t)i, &pLinkStatus, &pSpeed, &pDuplex) !=0 ){printk("rtk_port_phyStatus_get error:%d",i);break;}printk("GetEthStatus, port= %d, pLinkStatus= %d, pSpeed= %d, pDuplex= %d \n",i, pLinkStatus, pSpeed, pDuplex);if(pLinkStatus == PORT_LINKUP){PORT_STATUS[i] = 1;printk("port_status\n");if(PRE_PORT_STATUS[i] != PORT_STATUS[i]){printk("port[%d] status changed, set led mode\n",i);if(pSpeed == PORT_SPEED_100M){printk("port_speed\n");}else{printk("port_speed error\n");}}}else{PORT_STATUS[i] = 0;printk("port_status\n");}PRE_PORT_STATUS[i] = PORT_STATUS[i];msleep(10);}}mutex_unlock(&rtl8309->status_lock);for(i=0;i<5;i++){status = status | PORT_STATUS[i];}if(status == 0)rtl8309->link_status = LINK_DOWN;else if(status == 1)rtl8309->link_status = LINK_UP;else rtl8309->link_status = LINK_UNKNOW;schedule_delayed_work(&rtl8309->check_status_work, msecs_to_jiffies(5000));
}static ssize_t rtl8309_status_read(struct device *dev,struct device_attribute *attr, char *buf)
{struct rtl8309_dev *rtl8309 = g_rtl8309;printk("rtl8309_status_read rtl8309_status_read:%d\n",rtl8309->link_status);return sprintf(buf, "%d\n", rtl8309->link_status);
}static ssize_t rtl8309_status_write(struct device *dev,struct device_attribute *attr,const char *buf, size_t count)
{printk("rtl8309_status_write rtl8309_status_write");return count;
}static DEVICE_ATTR(linkstatus, 0644,rtl8309_status_read, rtl8309_status_write);static const struct file_operations rtl8309_fops = {.owner = THIS_MODULE,.read = rtl8309_read,.write = rtl8309_write,.unlocked_ioctl = rtl8309_ioctl,
};struct miscdevice rtl8309_miscdev = {.minor = MISC_DYNAMIC_MINOR,.name = "rtl8309_dev",.fops = &rtl8309_fops,
};static int rtl8309_probe(struct platform_device *pdev)
{printk("rtl8309_probe");struct rtl8309_dev *rtl8309;int ret = 0;rtl8309 = devm_kzalloc(&pdev->dev, sizeof(*rtl8309), GFP_KERNEL);if (!rtl8309)return -ENOMEM;rtl8309->dev = &pdev->dev;rtl8309->rtl8309_mdio = devm_gpiod_get_optional(rtl8309->dev,"rtl8309-mdio", GPIOD_OUT_HIGH);if (IS_ERR(rtl8309->rtl8309_mdio)) {printk("Could not get rtl8367-mdio");rtl8309->rtl8309_mdio = NULL;}rtl8309->rtl8309_mdc = devm_gpiod_get_optional(rtl8309->dev,"rtl8309-mdc", GPIOD_OUT_HIGH);if (IS_ERR(rtl8309->rtl8309_mdc)) {printk("Could not get rtl8367-mdc ");rtl8309->rtl8309_mdc = NULL;}g_rtl8309 = rtl8309;ret = misc_register(&rtl8309_miscdev);if (ret) {ERR("rtl8309_miscdev ERROR: could not register rtl8309_miscdev device\n");return ret;}ret = device_create_file(rtl8309_miscdev.this_device,&dev_attr_linkstatus);if (ret) {printk("failed to create attr linkstatus");return ret;}mutex_init(&rtl8309->status_lock);INIT_DELAYED_WORK(&rtl8309->check_status_work, check_link_status);schedule_delayed_work(&rtl8309->check_status_work, msecs_to_jiffies(5000));return 0;
}static int rtl8309_remove(struct platform_device *client)
{return 0;
}static const struct of_device_id rtl8309_of_match[] = {{ .compatible = "rtl8309" },{}
};
MODULE_DEVICE_TABLE(of, rtl8309_of_match);static struct platform_driver rtl8309_driver = {.probe = rtl8309_probe,.remove = rtl8309_remove,.driver = {.owner = THIS_MODULE,.name = DRIVER_NAME,.of_match_table = of_match_ptr(rtl8309_of_match),},
};static int __init rtl8309_init(void)
{int ret = platform_driver_register(&rtl8309_driver);if (ret != 0) {pr_err("Failed to register example driver: %d\n", ret);return ret;}pr_info("Example driver initialized\n");return 0;
}static void __exit rtl8309_exit(void)
{platform_driver_unregister(&rtl8309_driver);pr_info("Example driver exited\n");
}module_init(rtl8309_init);
module_exit(rtl8309_exit);MODULE_DESCRIPTION("rtl8309 GPIO Switch");
MODULE_AUTHOR("Zewei Ye <yezw@ist.com.hk>");
MODULE_LICENSE("GPL v2");函数说明:rtk_port_phyStatus_get为原厂提供的读取RTL8306M芯片状态的接口,根据返回的状态判断是否有百兆网。