文章目录
- 粒子群算法
- △ matlab工具箱粒子群函数
- ○ 代码
- ○
- ○ 手搓代码实现粒子群优化 2个变量(xy)的粒子群优化尝试
- · 定义函数
- · 绘制网格图(用来可视化过程)
- · 参数初始化,绘制粒子初始位置
- · 开始迭代过程并绘图
- · 获取结果并绘图
- · 运行结果
- 遗传算法
- △ 遗传算法概念
最近在做一些机器人位姿优化方面的东西,学习了一下关于智能优化算法方面的内容,于是在这里整理一下。
最近时间比较紧张,就不写太详细了
❤ 2023.12.12 ❤
粒子群算法
参考资料
B站的一个视频,比较简单给了代码
→→→【Matlab 粒子群算法PSO实例学习(有代码和详细注释)】
这个也是B站视频,里面是一个关于matlab优化算法的13讲课程中的一部分,完整版的课程和资料还是很好找的,但是这个课程有点旧,当然里面的算法就更旧了。。。
→→→【我居然只花4个小时就学懂了【优化算法】,遗传算法、蚁群算法、模拟退火算法、粒子群优化算法】
关于粒子群算法参数的调整与改进
→→→【Matlab粒子群算法(PSO)优化程序——调整权重、改进学习因子】
matlab自带的智能算法工具箱的简单介绍
→→→【3-7matlab自带的粒子群工具箱的讲解和演示视频课程】
→→→【】
△ matlab工具箱粒子群函数
○ 代码
使用matlab工具箱实现粒子群还是很简单的,但是可以调节的参数有限,不过胜在简单
%% 配置参数
options = optimoptions('particleswarm');
options.SwarmSize = 50; % 粒子数量
options.MaxIterations = 50; % 最大迭代次数
options.Display = 'iter'; % 显示每次迭代的信息
% options.UseParallel = true; % 开启并行计算
options.PlotFcn = 'pswplotbestf';nvars = 6; % 变量的数量
% 变量范围
% x[0.5, 3]
% y[-1.5, 2]
% z[1, 3]?
% A[-180, 180]
% B[-90, 90]
% C[-90, 90]
lb = [0.5, -2, 1, -180, -90, -90];
ub = [3, 1.5, 3, 180, 90, 90];% 开始计时
tic;[x, fval] = particleswarm( @(x) -1 * objectiveFunction(x), nvars, lb, ub, options);% 结束计时
SolvingTime = toc;fprintf('程序运行时间:%.2f 秒。\n', SolvingTime);disp("最优解: " + mat2str(x));
disp("目标函数值: " + num2str(-fval));%%
function y = objectiveFunction(x)Pose_workpiece = [x(1) x(2) x(3) x(4) x(5) x(6)];y = Get_Comprehensive_Stability_Coefficient_PSO(Pose_workpiece);
end
需要注意的是函数默认寻找的是最小值,如果想找的是最大值需要手动加个负号
另外据chatgpt说也可以实时监测求解过程的情况,但是他给的代码一直报错我就放弃了。。。
○
○ 手搓代码实现粒子群优化 2个变量(xy)的粒子群优化尝试
我的代码基于
→→→【Matlab 粒子群算法PSO实例学习(有代码和详细注释)】
感谢up~
· 定义函数
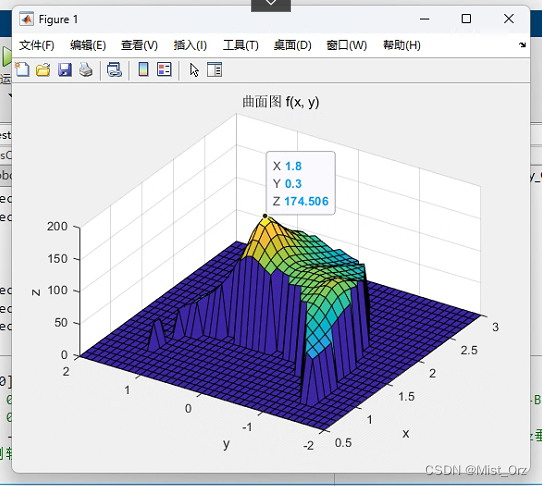
Pose_workpiece = [x(1) x(2) 1.3 0 -45 0];
因为更改了原点位置,所以曲面图有变化
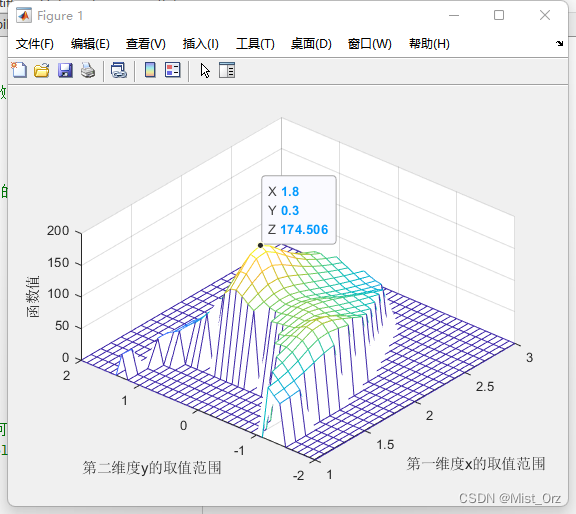
surf:
mesh:
% xy优化
function y = objectiveFunction(x)% Pose_workpiece = [x(1) x(2) x(3) x(4) x(5) x(6)];Pose_workpiece = [x(1) x(2) 1.3 0 -45 0];y = Get_Comprehensive_Stability_Coefficient_PSO(Pose_workpiece);
end
· 绘制网格图(用来可视化过程)
%% 调用函数绘制网格
f = @(x) objectiveFunction(x);
figure(1);
[X, Y] = meshgrid(1:0.1:3, -2:0.1:2); % 生成网格数据
x = [X(:), Y(:)];% 对 x 中的每一行应用函数 f
% y0 = arrayfun(@(i) f(x(i, :)), 1:size(x, 1));
y0 = load('y0_for_test_mesh_data.mat'); % 将计算好的网格数据读入
y0 = y0.y0;% 重塑 y0 以匹配 X 和 Y 的尺寸
y0_matrix = reshape(y0, size(X));% 计算梯度
[Cx, Cy] = gradient(y0_matrix, 0.1, 0.1);% 绘制网格图
mesh(X, Y, y0_matrix);% colorbar;%可以看到色板,也可以给指定区域指定颜色%set(h,'EdgeColor','b','FaceColor','w','MarkerEdgecolor','r','MarkerFacecolor','y')
xlabel('第一维度x的取值范围');
ylabel('第二维度y的取值范围');
zlabel('函数值');
hold on;
就是上面那个效果
· 参数初始化,绘制粒子初始位置
%% 开始种群等基本定义
N = 50; % 初始种群个数
d = 2; % 空间维数(参看上述的函数表达式)
ger = 50; % 最大迭代次数
plimit = [1,3;-2,2]; % 设置位置参数限制(矩阵的形式可以多维),现在2X2矩阵
vlimit = [-0.5, 0.5;-0.5, 0.5]; % 设置速度限制【?】
w = 0.8; % 惯性权重,个体历史成绩对现在的影响0.5~1之间【?】
%还有自适应调整权重、随机权重等等
%(不同的权重设置很影响性能,按需要选取)c1 = 0.5; % 自我学习因子【?】
c2 = 0.5; % 群体学习因子 【?】tic; %计时开始for i = 1:dx(:,i) = plimit(i, 1) + (plimit(i, 2) - plimit(i, 1)) * rand(N, 1);%初始种群的位置end %rand(N,1)产生N行一列范围在1之内的随机数%第一列,第二列:x=0+(20-0)*(1之内的随机数) v = rand(N, d); % 初始种群的速度,500行2列分别在两个维度上
xm = x; % 每个个体的历史最佳位置
ym = zeros(1, d); % 种群的历史最佳位置,两个维度,设置为0
fxm = zeros(N, 1); % 每个个体的历史最佳适应度,设置为0
fym = -inf; % 种群历史最佳适应度,求最大值先设置成负无穷n = size(x, 1);
fx_plot = zeros(n, 1); % 初始化结果数组
parfor i = 1:nfx_plot(i) = f(x(i, :));
endplot3(xm(:,1),xm(:,2),fx_plot, 'mo'); %r红,g绿,b蓝,c蓝绿,m紫红,y黄,k黑,w白
title('种群初始分布状态图'); %plot3在三维区域画出空间上的点,把格式设置成‘o’用来画每个位置的散点图
hold on; %figure(2);
%mesh(x0_1, x0_2, y0);
%hold on;
%plot3(xm(:,1),xm(:,2),f(xm(:,1),xm(:,2)), 'ro');
%hold on;iter=1; %初始的迭代次数因为用while设置为一times = 1;
record = zeros(ger, 1); %记录器
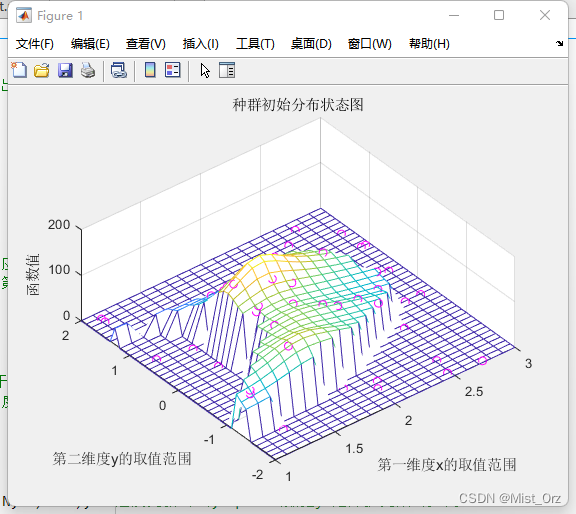
还挺好看。。。
· 开始迭代过程并绘图
%% 迭代更新开始
while iter <= ger
% fx = f(x(:,1),x(:,2)); % 代入x中的二维数据,算出个体当前适应度,为500行1列的数据 n = size(x, 1);fx = zeros(n, 1); % 初始化结果数组parfor i = 1:nfx(i) = f(x(i, :));endfor i = 1:N %对每一个个体做判断if fxm(i) < fx(i) %如果每个个体的历史最佳适应度小于个体当前适应度fxm(i) = fx(i); % 更新个体历史最佳适应度,第一轮就是把小于零的清除xm(i,:) = x(i,:); % 更新个体历史最佳位置end endif fym < max(fxm) %种群历史最佳适应度小于个体里面最佳适应度的最大值[fym, nmax] = max(fxm); % 更新群体历史最佳适应度,取出最大适应度的值和所在行数即位置ym = xm(nmax, :); % 更新群体历史最佳位置end% 速度更新v = v * w + c1 * rand *(xm - x) + c2 * rand *(repmat(ym, N, 1) - x); % 速度更新公式,repmat函数把ym矩阵扩充成N行1列% 边界速度处理for i=1:d for j=1:Nif v(j,i)>vlimit(i,2) %如果速度大于边界速度,则把速度拉回边界v(j,i)=vlimit(i,2);endif v(j,i) < vlimit(i,1) %如果速度小于边界速度,则把速度拉回边界v(j,i)=vlimit(i,1);endendend % 位置更新x = x + v; % 位置更新for i=1:d for j=1:Nif x(j,i)>plimit(i,2)x(j,i)=plimit(i,2);endif x(j,i) < plimit(i,1)x(j,i)=plimit(i,1);endendendrecord(iter) = fym; %记录最大值if times >= 2cla; %清除轴线图形mesh(X, Y, y0_matrix);% 并行计算优化n = size(x, 1);fx_plot = zeros(n, 1); % 初始化结果数组parfor i = 1:nfx_plot(i) = f(x(i, :));endplot3(x(:,1),x(:,2),fx_plot, 'ro');title('状态位置变化');pause(0.5);times=0;enditer = iter+1;times=times+1;
end
· 获取结果并绘图
%% 作图
figure(3);
plot(record); %画出最大值的变化过程
title('收敛过程');figure(4);
mesh(X, Y, y0_matrix);
hold on;% 并行计算优化
n = size(x, 1);
fx_plot = zeros(n, 1); % 初始化结果数组
parfor i = 1:nfx_plot(i) = f(x(i, :));
endplot3(x(:,1),x(:,2),fx_plot, 'ro');title('最终状态图');disp(['最大值为:',num2str(fym)]);
disp(['最大值点位置:',num2str(ym)]);
toc; %计时结束
· 运行结果
设置种群数量10,迭代次数10,验证程序流程

符合预期
遗传算法
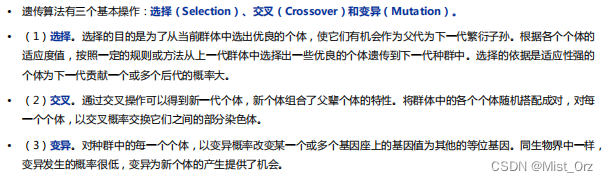
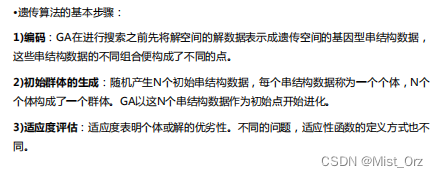
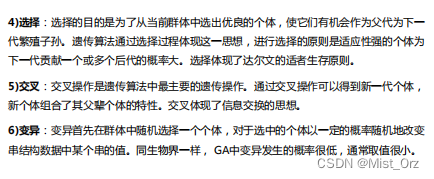
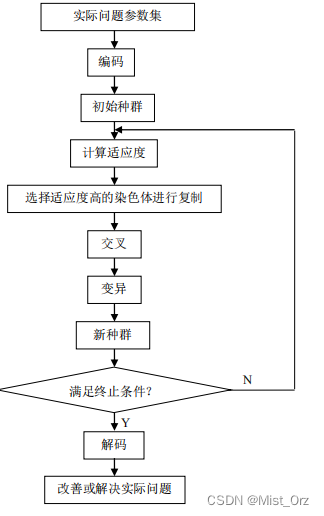
△ 遗传算法概念