一,摄像头简介
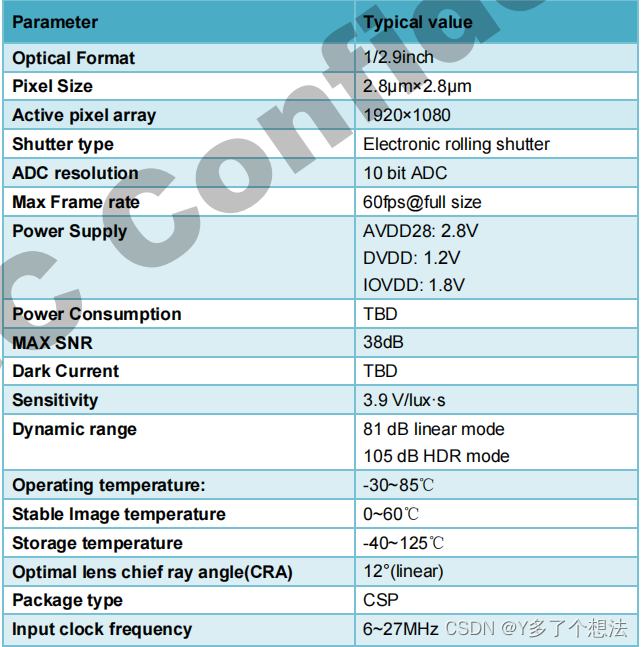
GC2093是一个高质量的1080P CMOS图像传感器,用于安全相机产品、数码相机产品和手机相机应用程序。包含了一个1920H x 1080V像素阵列、片上10位ADC和图像信号处理器。高性能和低功耗功能的全面集成使GC2093最适合设计,减少了实现过程,并延长了运动相机、汽车DVR和各种移动应用的电池寿命。它提供了RAW10和RAW8数据格式。它有一个主机常用的双线串行接口来控制整个传感器的运行。
技术规格:
二,驱动文件配置
1.源程序
~/RK3568_Android11/kernel/drivers/media/i2c/gc2093.c
2.修改i2c目录下的 Makefile以及Kconfig
kernel/drivers/media/i2c/Makefile中添加:
obj-$(CONFIG_VIDEO_GC2093) += gc2093.o------------------------------------------------------------------------
kernel/drivers/media/i2c/Kconfig中添加:
config VIDEO_GC2093tristate "GalaxyCore GC2093 sensor support"depends on I2C && VIDEO_V4L2 && VIDEO_V4L2_SUBDEV_APIdepends on MEDIA_CAMERA_SUPPORTselect V4L2_FWNODEhelpSupport for the GalaxyCore GC2093 sensor.To compile this driver as a module, choose M here: themodule will be called gc2093.
3.内核中加载驱动
kernel/arch/arm64/configs/rockchip_defconfig中添加:
CONFIG_VIDEO_GC2093=y
三,DTS配置
1.摄像头链接示意图
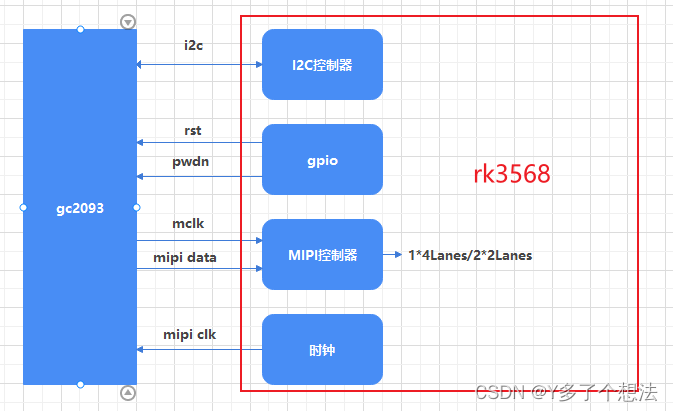
GC系列摄像头与SOC连接的主要的引脚有: i2c、rst、pwdn、mclk、MIPI Clk、MIPI DATA。
2. 硬件原理图
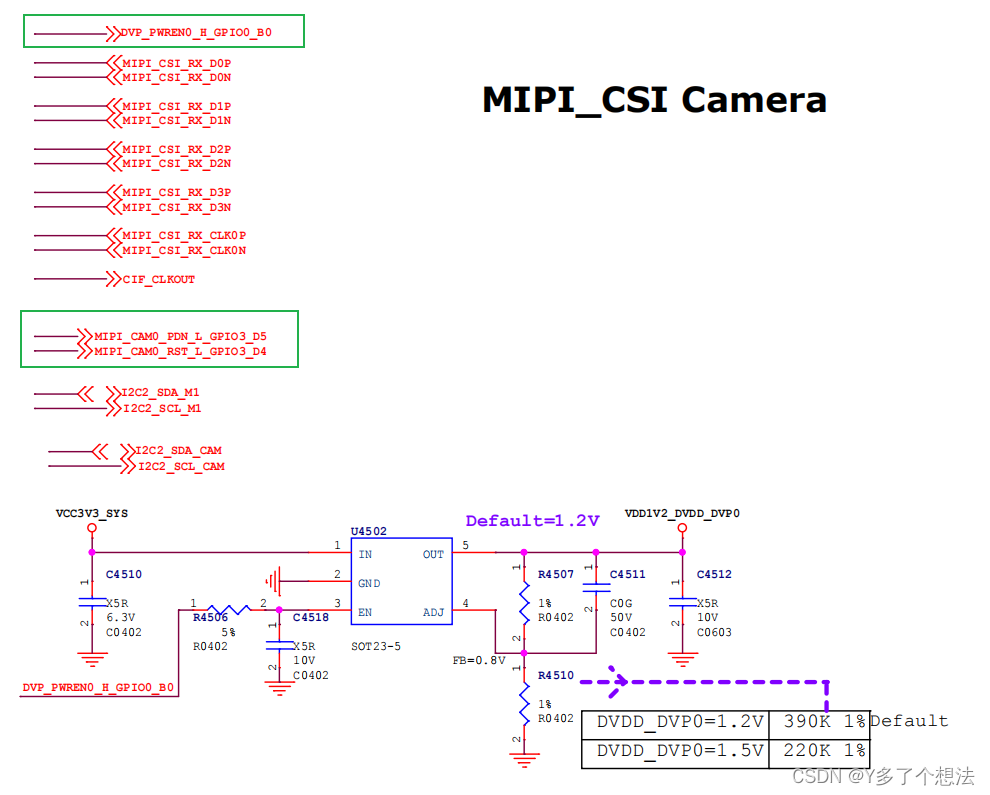
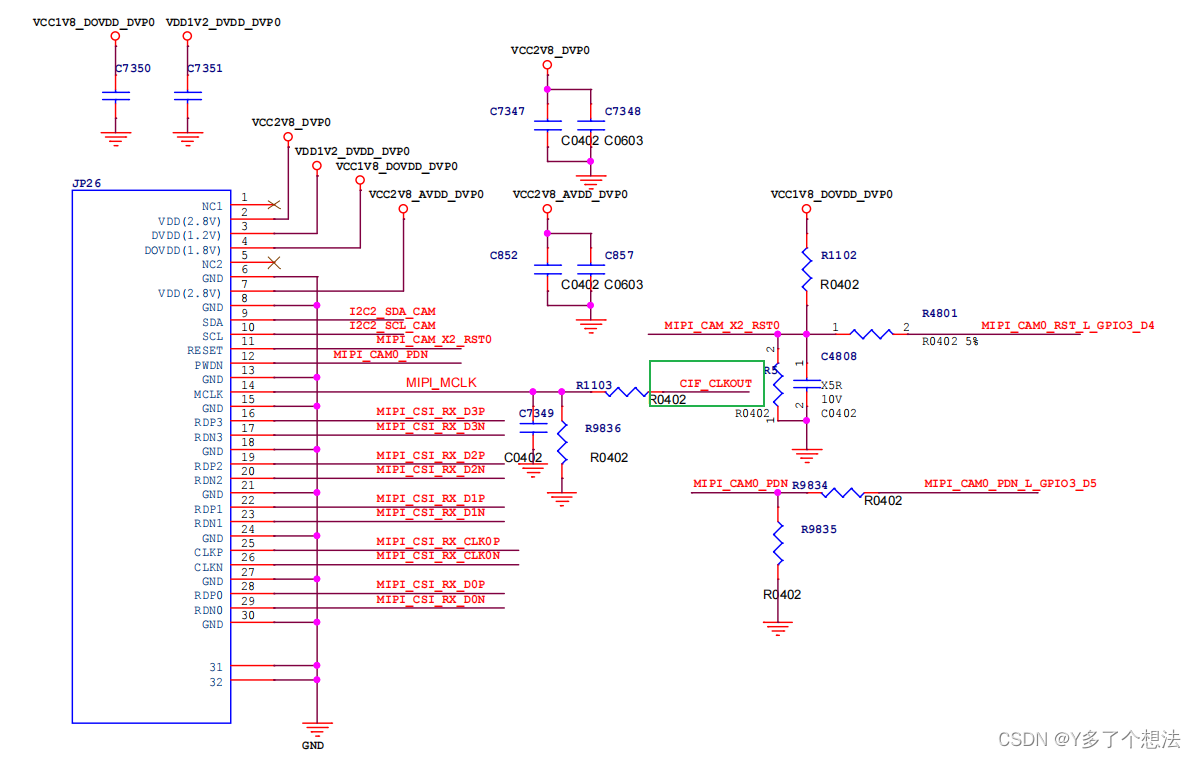
从电路图可看出关键引脚关系:
reset信号:GPIO3 D4
power down信号:GPIO3 D5
电源信号:GPIO0 B0
clock:cif_clk
3.dts节点
对于RK3568平台而言,仅有一个标准物理mipi csi2 dphy,可以工作在两个模式:full mode 和split mode,拆分为csi2_dphy0/csi2_dphy1/csi2_dphy2三个逻辑dphy,特性如下:
Full mode:
- 仅使用csi2_dphy0,csi2_dphy0与csi2_dphy1/csi2_dphy2互斥,不可同时使用;
- data lane最大4 lanes;
- 最大速率2.5Gbps/lane;
Split mode:
- 仅使用csi2_dphy1和csi2_dphy2, 与csi2_dphy0互斥,不可同时使用;
- csi2_dphy1和csi2_dphy2可同时使用;
- csi2_dphy1和csi2_dphy2各自的data lane最大是2 lanes;
- csi2_dphy1对应物理dphy的lane0/lane1;
- csi2_dphy2对应物理dphy的lane2/lane3;
- 最大速率2.5Gbps/lane
//mipi camera
&i2c2 {gc2093: gc2093@37 {compatible = "galaxycore,gc2093";reg = <0x37>;status = "okay";clocks = <&cru CLK_CIF_OUT>;clock-names = "xvclk";power-domains = <&power RK3568_PD_VI>;pinctrl-names = "default";pinctrl-0 = <&cif_clk>;avdd-supply = <&vcc_camera>; //power电源脚,需要默认拉高reset-gpios = <&gpio3 RK_PD4 GPIO_ACTIVE_LOW>;pwdn-gpios = <&gpio3 RK_PD5 GPIO_ACTIVE_HIGH>;rockchip,grf = <&grf>;rockchip,camera-module-index = <0>;rockchip,camera-module-facing = "front"; //模组朝向,有"back"和"front"rockchip,camera-module-name = "YT-RV1109-2-V1"; rockchip,camera-module-lens-name = "40IR-2MP-F20"; //module与lens命令要与设备/etc/iqfiles中对应sensor的json文件名后面相同port {gc2093_out: endpoint {remote-endpoint = <&dphy0_in>;data-lanes = <1 2 3 4>;};};};
};&csi2_dphy_hw {status = "okay";
};&csi2_dphy0 {status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@0 {reg = <0>;#address-cells = <1>;#size-cells = <0>;dphy0_in: endpoint@1 {reg = <1>;remote-endpoint = <&gc2093_out>;data-lanes = <1 2 3 4>;};};port@1 {reg = <1>;#address-cells = <1>;#size-cells = <0>;dphy0_out: endpoint@1 {reg = <0>;remote-endpoint = <&isp0_in>;};};};
};&rkisp {status = "okay";
};&rkisp_mmu {status = "okay";
};&rkisp_vir0 {status = "okay";port {#address-cells = <1>;#size-cells = <0>;isp0_in: endpoint@0 {reg = <0>;remote-endpoint = <&dphy0_out>;};};
};&cif_clk {rockchip,pins =/* cif_clkout */<4 RK_PC0 1 &pcfg_pull_none>;
};==================================================================================
vcc_camera: vcc-camera-regulator {compatible = "regulator-fixed";gpio = <&gpio0 RK_PB0 GPIO_ACTIVE_HIGH>;pinctrl-names = "default";pinctrl-0 = <&camera_pwr>;regulator-name = "vcc_camera";enable-active-high;regulator-always-on;regulator-boot-on;};&pinctrl {cam {camera_pwr: camera-pwr {rockchip,pins =/* camera power en */<0 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>;};};
};四,调试
1.开机log打印
rk3568:/ # dmesg | grep gc
[ 0.000000] Linux version 4.19.232 (fy@001) (gcc version 6.3.1 20170404 (Linaro GCC 6.3-2017.05), GNU ld (Linaro_Binutils-2017.05) 2.27.0.20161019) #19
7 SMP PREEMPT Mon Dec 11 11:20:47 CST 2023
[ 6.409370] gc2093 2-007e: driver version: 00.01.03
[ 6.409504] gc2093 2-007e: 2-007e supply dovdd not found, using dummy regulator
[ 6.409555] gc2093 2-007e: Linked as a consumer to regulator.0
[ 6.409599] gc2093 2-007e: Linked as a consumer to regulator.13
[ 6.409622] gc2093 2-007e: 2-007e supply dvdd not found, using dummy regulator
[ 6.431373] gc2093 2-007e: Detected GC2093 sensor
[ 6.431422] rockchip-csi2-dphy csi2-dphy0: dphy0 matches m00_f_gc2093 2-007e:bus type 4
[ 51.782028] gc2093 2-007e: gc2093_s_stream: on: 1, 1920x1080@30
[ 109.871508] gc2093 2-007e: gc2093_s_stream: on: 0, 1920x1080@30
[ 109.905541] gc2093 2-007e: gc2093_s_stream: on: 0, sleep(33333us)
日志可以看到已经成功读到sensor id = GC2093。
2. 查看gpio的使用情况
rk3568:/ # cat /sys/kernel/debug/gpio
gpiochip0: GPIOs 0-31, parent: platform/fdd60000.gpio, gpio0:
gpio-5 ( |usb-port0-power-ctl ) out lo
gpio-6 ( |usb-port1-power-ctl ) out hi
gpio-8 ( |vcc_camera ) out hi
gpio-15 ( |breath-led ) out hi
gpio-16 ( |work ) out lo
gpio-21 ( |enable ) out hi
gpio-29 ( |reset ) out higpiochip1: GPIOs 32-63, parent: platform/fe740000.gpio, gpio1:gpiochip2: GPIOs 64-95, parent: platform/fe750000.gpio, gpio2:
gpio-73 ( |reset ) out hi
gpio-77 ( |bt_default_rts ) in hi
gpio-79 ( |bt_default_reset ) out lo
gpio-80 ( |bt_default_wake_host) in hi
gpio-81 ( |bt_default_wake ) in lo
gpio-88 ( |io1 ) out lo
gpio-89 ( |io2 ) out lo
gpio-90 ( |io3 ) out hi
gpio-91 ( |io4 ) out hi
gpio-93 ( |usb-port2-power-ctl ) out hi
gpio-94 ( |usb-port3-power-ctl ) out higpiochip3: GPIOs 96-127, parent: platform/fe760000.gpio, gpio3:
gpio-104 ( |mdio-reset ) out hi
gpio-109 ( |rs485-ctrl ) out lo
gpio-114 ( |headset_gpio ) in lo
gpio-115 ( |spk-ctl ) out hi
gpio-118 ( |enable ) out hi
gpio-119 ( |enable ) out lo
gpio-122 ( |red-led ) out hi
gpio-123 ( |blue-led ) out lo
gpio-124 ( |reset ) out lo
gpio-125 ( |pwdn ) out lo
可以看出vcc_camera,reset和pwdn 都是有状态,证明摄像头是加载成功了的。
3. 内核会为摄像头在目录/sys/class/video4linux下分配设备信息描述文件
rk3568:/ # grep "" /sys/class/video4linux/v*/name | grep mainpath
/sys/class/video4linux/video0/name:rkisp_mainpath
4.显示摄像头参数
rk3568:/ # v4l2-ctl -d /dev/video0 -l
User Controlsexposure 0x00980911 (int) : min=1 max=1121 step=1 default=1120 value=338horizontal_flip 0x00980914 (bool) : default=0 value=0vertical_flip 0x00980915 (bool) : default=0 value=0Image Source Controlsvertical_blanking 0x009e0901 (int) : min=45 max=15303 step=1 default=45 value=45horizontal_blanking 0x009e0902 (int) : min=280 max=280 step=1 default=280 value=280 flags=read-onlyanalogue_gain 0x009e0903 (int) : min=64 max=8192 step=1 default=64 value=111Image Processing Controlslink_frequency 0x009f0901 (intmenu): min=0 max=1 default=0 value=0pixel_rate 0x009f0902 (int64) : min=0 max=316800000 step=1 default=237600000 value=237600000 flags=read-only
输出将包括不同类别的控制参数,如“User Controls”和“Image Processing Controls”。
每个控制参数通常包含以下信息:
- 控制名称:如 horizontal_flip 或 test_pattern。
- 参数类型:如 (bool) 表示布尔类型,(menu) 表示有固定选项的菜单。
- 控制标识符:如 0x00980914,这是内部用于识别控制的唯一标识。 取值范围:例如 min=0 max=1 表示取值范围从0到1。
- 默认值:如 default=0 表示控制的默认设置。 当前值:如 value=0 表示当前设置的值。
5.修改摄像头时钟频率(mclk)以及帧率(fps)
1>. gc2093.c文件中打开MCLK_27M宏定义,时钟频率为27M;注释掉则默认为24M。
2>. 帧率对应关系:
30fps:0x04,0xe2
25fps:0x05,0xdc
20fps:0x07,0x53
diff --git a/kernel/drivers/media/i2c/gc2093.c b/kernel/drivers/media/i2c/gc2093.c
index 032c6cbb53..cdc57cf1d5 100644
--- a/kernel/drivers/media/i2c/gc2093.c
+++ b/kernel/drivers/media/i2c/gc2093.c
@@ -42,7 +42,7 @@#define MIPI_FREQ_396M 396000000/* 27M or 24M */
-//#define MCLK_27M
+#define MCLK_27M#ifdef MCLK_27M#define GC2093_XVCLK_FREQ 27000000
@@ -501,8 +501,8 @@ static const struct reg_sequence gc2093_1080p_hdr_settings[] = {{0x0010, 0x8c},{0x0013, 0x15},{0x0019, 0x0c},
- {0x0041, 0x04}, //30fps: 0x4e2; 25FPS: 0x5dc: 20FPS: 0x753
- {0x0042, 0xe2},
+ {0x0041, 0x05}, //30fps: 0x4e2; 25FPS: 0x5dc: 20FPS: 0x753
+ {0x0042, 0xdc},{0x0053, 0x60},{0x008d, 0x92},{0x0090, 0x00},
五,遇到的问题
1.摄像头加载失败,读不到sensor id
[6.874014] gc2093 2-007e: driver version: 00.01.03
[6.874127] gc2093 2-007e: Failed to get reset-gpios
[6.874201] gc2093 2-007e: 2-007e supply dovdd not found, using dummy regulator
[6.874270] gc2093 2-007e: Linked as a consumer to regulator.0
[6.874311] gc2093 2-007e: 2-007e supply avdd not found, using dummy regulator
[6.874408] gc2093 2-007e: 2-007e supply dvdd not found, using dummy regulator
[6.895219] gc2093 2-007e: i2c read failed at addr: 3f0
[6.895444] gc2093 2-007e: i2c read failed at addr: 3f1
[6.895471] gc2093 2-007e: Failed to read sensor id, (-6)
要确保reset和pwdn引脚没有被复用,且初始状态正确。
2. 显示异常拉伸
具体现象:系统横屏状态(0度,180度)下预览画面有拉伸;竖屏状态(90度,270度)下预览画面就是正常。
hardware/rockchip/camera/etc/camera/camera3_profiles_rk356x.xml
安卓配置文件中 xml中有模组方式配置,找到gc2093摄像头配置,修改sensor.orientation值(0,90,180,270)
<sensor.orientation value="0"/>
实测修改后显示正常。