本文是关于51单片机中断系统的扩展实验。
文章目录
- 一、 扩展实验一:使用外部中断0控制蜂鸣器,外部中断1控制直流电机
- 二、扩展实验二:修改定时器初值,设定3秒钟的定时时间让LED模块闪烁
- 三、扩展实验三:使用定时器1和数码管设计一个数字时钟
一、 扩展实验一:使用外部中断0控制蜂鸣器,外部中断1控制直流电机
外部中断扩展实验一实现的功能:使用外部中断0控制蜂鸣器发声/不发声,外部中断1控制直流电机转动/停止。
由蜂鸣器的内容可以知道,蜂鸣器分为有源蜂鸣器和无源蜂鸣器;蜂鸣器有两个管脚,要使蜂鸣器发声,需要有电流通过蜂鸣器,即管脚一端接正极,管脚另一端接负极。有源蜂鸣器只需给一定的电压即可发声,无源蜂鸣器需要一定频率的脉冲才可发声。这里设计了两种蜂鸣器,都由外部中断0控制。
直流电机的驱动方式与蜂鸣器类似。
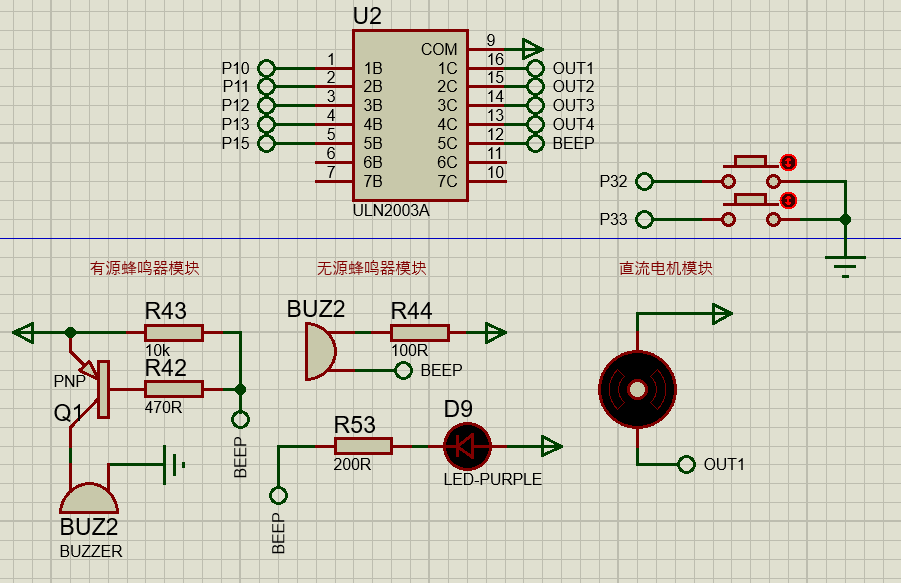
proteus中硬件设计如下,为显示蜂鸣器的发声,这里使用了一个LED显示发声与否。蜂鸣器的一端连接到电源,另一端经过ULN2003芯片连接P1.5口,当P1.5=0时蜂鸣器发声;直流电机的一端连接到电源,另一端经过ULN2003连接到P1.0口,当P1.0=0时电机转动。为体现中断,使用独立按键模块连接到P3.2和P3.3口,当按键按下,蜂鸣器发声或电机转动。
软件设计如下:
/*实现功能:外部中断0控制蜂鸣器发声,外部中断1控制直流电机转动- 与外部中断0和外部中断1有关的有两个寄存器IE和TCON,- IE是中断允许控制寄存器,TCON是中断请求标志寄存器。- IE中包括了- 总中断允许位(EA)- 外部中断0/1允许位(EX0/EX1)- 定时器0/1允许位(ET0/ET1)- 串口中断允许位(ES);- TCON中的低四位是外部中断允许和触发方式控制位,包括了- IT0/IT1是外部中断0/1触发方式控制位,0表示低电平触发,1表示下降沿触发;- IE0/IE1是外部中断0/1请求标志位[2023-12-19] zoya
*/#include "reg52.h"
#include "typedef.h"
#include "Delay.h"sbit BEEP = P1^5;
sbit MOTOR = P1^0;
sbit CTR_INT0 = P3^2;
sbit CTR_INT1 = P3^3;/*************************************************************************
* 函数名: IntInit
* 函数功能: 外部中断0/1初始化,设置中断触发方式为边沿触发
* 输入: void
* 输出: void
**************************************************************************/
void IntInit()
{// 1. 设置中断触发方式IT0=1;IT1=1;// 2. 打开外部中断0/1EX0=1;EX1=1;// 3. 打开总中断EA=1;
}void main()
{MOTOR=0;BEEP=0;IntInit(); while(1);
}/*************************************************************************
* 函数名: Int0
* 函数功能: 外部中断0中断服务函数,
* 控制蜂鸣器发声
* 输入: void
* 输出: void
**************************************************************************/
void Int0() interrupt 0
{delayms(10); // 按键延时消抖if(0 == CTR_INT0){BEEP = ~BEEP;}
}/*************************************************************************
* 函数名: Int1
* 函数功能: 外部中断1中断服务函数,
* 控制直流电机转动
* 输入: void
* 输出: void
**************************************************************************/
void Int1() interrupt 2
{delayms(10); // 按键延时消抖if(0 == CTR_INT1){MOTOR=~MOTOR;}
}
仿真结果:
二、扩展实验二:修改定时器初值,设定3秒钟的定时时间让LED模块闪烁
如何计算定时器初值?
以使用12MHz的晶振频率计算。如果使用的是12MHz晶振,单片机内部的时钟频率为12分频即12/12MHz=1MHz;那么对应的机器周期为1/1MHz=1us。即使用12MHz晶振的机器周期为1us。
如果要定时1ms,需要计数1ms/1us=1000个,定时器使用方式1工作,那么初值为 2 16 − 1000 = 64536 2^{16}-1000 = 64536 216−1000=64536 = 0xFC18。即初值THx=0xfc,TLx=0x18。
如果要定时1s,可以通过初值设置定时1ms,当定时结束重新赋初值,并设定一个全局变量累计定时1ms的次数,当该全局变量累计1000次时表示定时1s。
如果要设定3s时间,可以通过初值设定定时3ms,其它同定时1ms。定时3ms需要计数3ms/1us=3000,定时器使用方式1工作,初值为 2 16 − 3000 2^{16} - 3000 216−3000 = 62536 = 0xF448,即初值THx=0xF4,TLx=0x48。
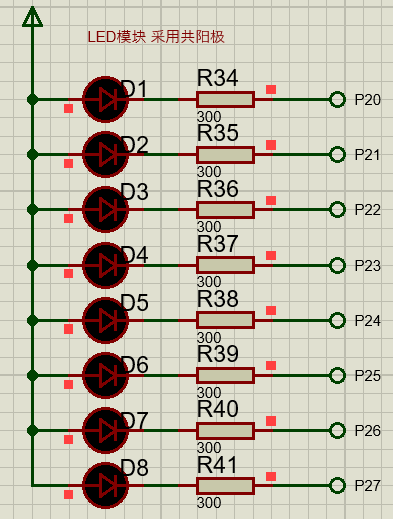
该实验在前面使用示例的基础上更改计数初值即可实现定时3s实现LED模块的闪烁。proteus中设计LED模块如下,定时器模块在单片机内部。
软件设计如下:
/*实现功能:定时器0定时3s实现LED模块亮灭- 与定时/计数器工作有关的寄存器有IE、TCON、TMOD、THx、TLx- IE是中断允许控制寄存器,TCON是中断请求标志寄存器,TMOD是定时/计数器工作方式寄存器- THx和TLx是计数初值赋值寄存器。- IE中包括了- 总中断允许位(EA)- 外部中断0/1允许位(EX0/EX1)- 定时器0/1允许位(ET0/ET1)- 串口中断允许位(ES);- TCON中的高四位用于控制定时/计数器的启动和中断申请,包括TR0/1、TF0/1- TR0/TR1是T0/T1运行控制位,TR0=1时开始工作,TR0=0时停止工作,TR1与TR0类似;- TF0/TF1是T0/T1溢出中断请求标志位,溢出时由硬件自动置位,CPU响应中断后由硬件自动清0可随时查询该位状态,也可软件置1或清0.- TMOD高四位控制T1,低四位控制T0,高四位和低四位分别为有GATE、C/T、M1M0- GATE是门控位,- GATE=0表示不受外部中断信号影响,仅TR0/TR1控制定时/计数器工作,- GATE=1表示受外部中断信号影响,即TR0/TR1+INT0控制定时/计数器工作- C/T是定时/计数器模式选择位,C/T=0为定时模式,C/T=1为计数模式;- M1M0是工作方式设置位,有四种方式:00 01 10 11[2023-12-20] zoya
*/#include "reg52.h"
#include "typedef.h"
#include "Delay.h"#define GPIO_LED P2
/*************************************************************************
* 函数名: Timer0Init
* 函数功能: 定时器0初始化,工作方式1定时3ms,仅TR0启动或停止计数
* 输入: void
* 输出: void
**************************************************************************/
void Timer0Init()
{// 1. 设置工作方式1,仅TR0控制TMOD |= 0x01;// 2. 设置定时3ms的初值,0xf448TH0 = 0xf4;TL0 = 0x48;// 3. 打开中断允许位EA = 1;ET0 = 1;// 4. 置位TR0,开始计数TR0 = 1;
}void main()
{Timer0Init(); while(1);
}/*************************************************************************
* 函数名: Timer0
* 函数功能: 定时器0中断服务函数,定时3s控制LED模块亮灭
* 输入: void
* 输出: void
**************************************************************************/
void Timer0() interrupt 1
{static u16 i;// 重新赋初值TH0 = 0xf4;TL0 = 0x48;i++;if(1000 == i){i=0;GPIO_LED = ~GPIO_LED;}
}
仿真结果:
三、扩展实验三:使用定时器1和数码管设计一个数字时钟
定时器的设置参考扩展实验二。
数字时钟采用24小时制,显示使用“00-00-00”格式。
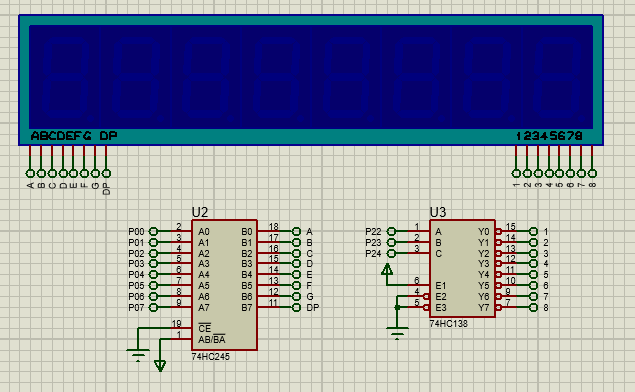
这里数码管使用一个八位一体的共阴极数码管,使用芯片74HC138控制数码管的位选,使用芯片74HC245控制数码管的段选;P0口控制74HC245的输入,P2.2 ~ P2.4控制74HC138的输入。proteus设计如下:
软件设计如下:
/*实现功能:定时器1和数码管设计一个数字时钟- 与定时/计数器工作有关的寄存器有IE、TCON、TMOD、THx、TLx- IE是中断允许控制寄存器,TCON是中断请求标志寄存器,TMOD是定时/计数器工作方式寄存器- THx和TLx是计数初值赋值寄存器。- IE中包括了- 总中断允许位(EA)- 外部中断0/1允许位(EX0/EX1)- 定时器0/1允许位(ET0/ET1)- 串口中断允许位(ES);- TCON中的高四位用于控制定时/计数器的启动和中断申请,包括TR0/1、TF0/1- TR0/TR1是T0/T1运行控制位,TR0=1时开始工作,TR0=0时停止工作,TR1与TR0类似;- TF0/TF1是T0/T1溢出中断请求标志位,溢出时由硬件自动置位,CPU响应中断后由硬件自动清0可随时查询该位状态,也可软件置1或清0.- TMOD高四位控制T1,低四位控制T0,高四位和低四位分别为有GATE、C/T、M1M0- GATE是门控位,- GATE=0表示不受外部中断信号影响,仅TR0/TR1控制定时/计数器工作,- GATE=1表示受外部中断信号影响,即TR0/TR1+INT0控制定时/计数器工作- C/T是定时/计数器模式选择位,C/T=0为定时模式,C/T=1为计数模式;- M1M0是工作方式设置位,有四种方式:00 01 10 11使用一个八位一体的共阴极数码管显示时间,74HC138芯片控制数码管的位选,74HC245控制数码管的段选。[2023-12-20] zoya
*/#include "reg52.h"
#include "typedef.h"
#include "Delay.h"#define GPIO_DISPLAY P0
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;// 共阴极数码管的码表,0-9以及:
u8 code smg[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x67, 0x40};static u16 h, m, s;/*************************************************************************
* 函数名: Timer0Init
* 函数功能: 定时器0初始化,工作方式1定时3ms,仅TR0启动或停止计数
* 输入: void
* 输出: void
**************************************************************************/
void Timer1Init()
{// 1. 设置工作方式1,仅TR0控制TMOD |= 0x10;// 2. 设置定时1ms的初值,0xFC18TH1 = 0xFC;TL1 = 0x18;// 3. 打开中断允许位EA = 1;ET1 = 1;// 4. 置位TR1,开始计数TR1 = 1;
}void DigDisplay()
{LSA=0; LSB=0; LSC=0; GPIO_DISPLAY = smg[h/10];delayms(1);LSA=1; LSB=0; LSC=0; GPIO_DISPLAY = smg[h%10];delayms(1);LSA=0; LSB=1; LSC=0; GPIO_DISPLAY = smg[10];delayms(1);LSA=1; LSB=1; LSC=0; GPIO_DISPLAY = smg[m/10];delayms(1);LSA=0; LSB=0; LSC=1; GPIO_DISPLAY = smg[m%10];delayms(1);LSA=1; LSB=0; LSC=1; GPIO_DISPLAY = smg[10];delayms(1);LSA=0; LSB=1; LSC=1; GPIO_DISPLAY = smg[s/10];delayms(1);LSA=1; LSB=1; LSC=1; GPIO_DISPLAY = smg[s%10];delayms(1);
}void main()
{GPIO_DISPLAY = 0x00;Timer1Init(); while(1){DigDisplay();}
}/*************************************************************************
* 函数名: Timer1
* 函数功能: 定时器1中断服务函数,控制数码管显示
* 输入: void
* 输出: void
**************************************************************************/
void Timer1() interrupt 3
{static u16 j;// 重新赋初值TH1 = 0xFC;TL1 = 0x18;j++;if(1000 == j){j=0;s++;if(60 == s){s=0; m++;if(60 == m){m=0; h++;if(24 == h){h=0;}}}}
}
仿真结果:

![[Spring 原理] 依赖查找](https://img-blog.csdnimg.cn/direct/0898402412984eaeadf18354928578a8.png)