本篇文章介绍了在TC397平台使用EB-treso对MCU驱动模块进行配置的实战过程,主要介绍了后续基本每个外设模块都要涉及的芯片时钟部分,帮助读者了解TC397芯片的时钟树结构,在后续计算配置不同外设模块诸如通信速率,定时器周期等,都能有一个清晰的输入频率来源理解。
目录
概述
MCU配置
General:McuGeneralConfiguration
General:McuModuleConfiguration
McuResetSettingConf
McuTrapSettingConf
McuClockSettingConfig
McuSystemPllSettingConfig
McuPeripheralPllSettingConfig
McuPllDistributionSettingConfig
McuExternalClockOutputConfig
McuClockMonitorConfig
McuModeSettingConf
McuDemEventParameter
McuRamSectorSettingConf
McuResetReasonConf
MCU驱动使用与调试
概述
当我们使用需要用到时钟的外设时,基本都需要对MCU驱动模块进行配置。驱动程序提供AUTOSAR指定的运行时服务接口。MCU驱动模块负责以下工作:
- 完成AUTOSAR上层组件指定的时钟、复位和静态低功耗模式功能配置。
- Trap功能的配置。
- 配置 BASIC 驱动程序所涉及的GTM、CCU6 和GPT12的全局特性。
- 为定时器IP的其他驱动程序提供库支持 - GTM、CCU6、GPT12和STM。
- 模拟转换器所需的相位同步器配置。
- 符合AUTOSAR规范的Runtime APIs,用于时钟、复位、低功耗管理和RAM初始化。
- 用于Trap管理的Runtime APIs。
本文的参考资料见下表。
| 序号 | 参考资料 | 内容 |
| 1 | 《MC-ISAR_TC3xx_UM_Mcu.pdf》 | 英飞凌提供的针对TC3xx芯片MCAL配置用户手册 |
| 2 | 《MC-ISAR_TC3xx_Config_Verification_Manual_Mcu.pdf》 | 英飞凌提供的针对TC3xx芯片配置验证手册,介绍动态代码与配置项的对应 |
| 3 | 《Infineon-AURIX_TC39x-UserManual-v02_00-EN》 | 英飞凌提供的TC39x芯片用户手册 |
下图为MCAL驱动模块涉及的软硬件接口关系图。
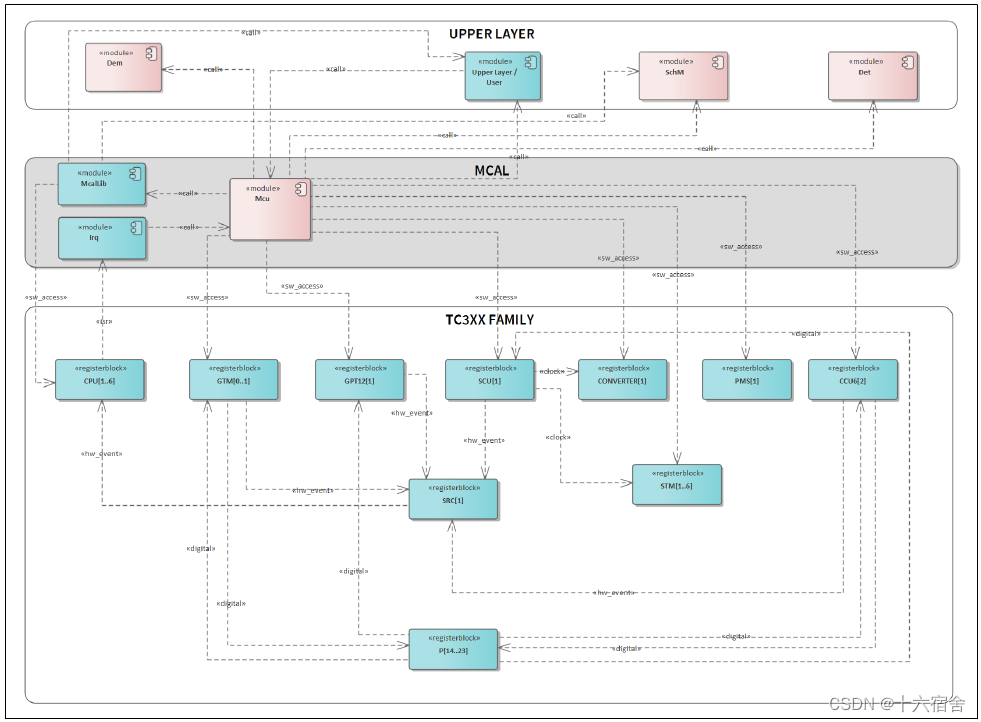
本次配置主要描述MCU本身需要配置的功能(主要为系统时钟),牵扯到独立功能的诸如GTM部分我们会在单独介绍其功能时描述对应MCU需要完成的配置。MCAL针对不同的驱动模块的配置项根据功能进行了容器的划分,下面是后边配置涉及的容器。

MCU配置
我们首先打开EB,导入Mcu与McalLib(McalLib里面的函数会贯穿整个MCAL)。本文只介绍MCU本身需要配置的部分。

本次配置的主要目标是完成芯片的时钟配置。板卡为英飞凌提供的KIT_A2G_TC397XA_TFT。涉及的软件包括:
- EB-treso:用于生成动态代码,具体工程搭建参考《【AUTOSAR MCAL】MCAL基础与EB tresos工程新建》。
- HighTech:用于编译生成elf文件,具体的工程搭建参考《【MCAL】HighTec集成TC3xx对应MCAL的Demo》。
- UDE 5.2:用于下载和调试程序。
需要注意的是MCU配置尤其是时钟这块儿的依赖项比较多,建议先使用MCAL EB-tresos Demo中的配置,需要特殊处理时钟分频系数或者某模块的时钟时,再单独修改,路径为:MC-ISAR_AS422_TC3xx_BASIC_2.20.0\DemoWorkspace\McalDemo\TC39B\1_ToolEnv\2_Tresos\AS422\DemoApp\config\Mcu.xdm。
General:McuGeneralConfiguration
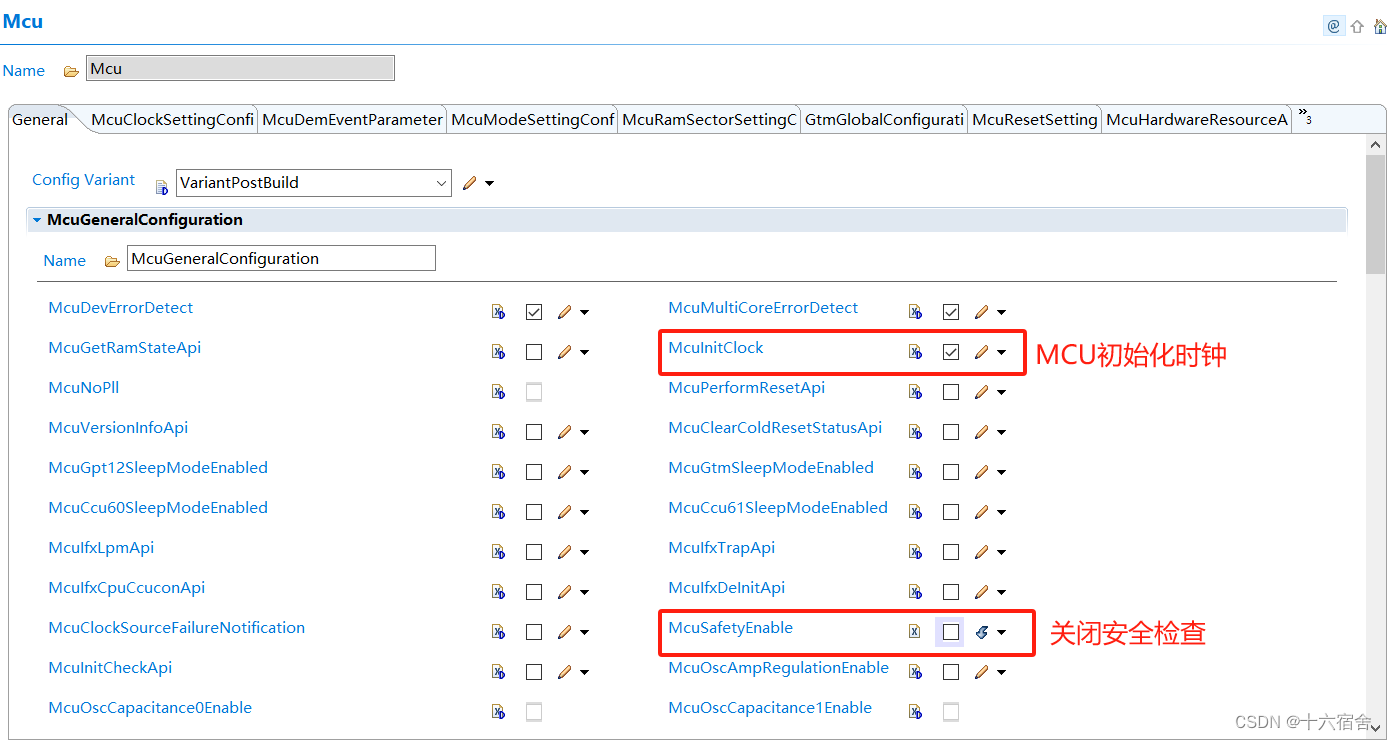
下图为General配置界面,需要修改的一个配置选项如下。
- McuSafetyEnable:因为我们的DEM没有对应的配置,所以我们需要关闭安全检查,否则报错生成动态代码会报错。
其余的选项根据功能开发需要选宏开关即可,我们这里直接采取默认的选项即可。需要着重理解的选项如下:
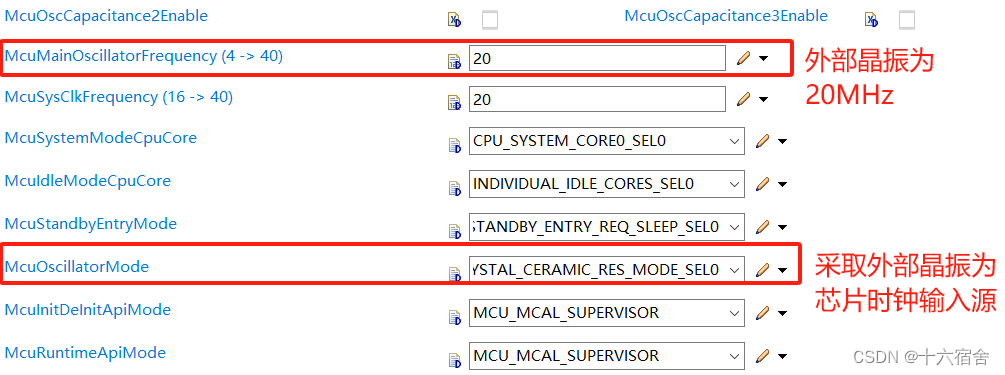
- McuInitClock:Mcu_InitClock API可用,用作初始化芯片时钟。
- McuMainOscillatorFrequency :外部部晶体或陶瓷谐振器频率为20Mhz。
- McuOscillatorMode:芯片时钟源是外部晶体或陶瓷谐振器模式。
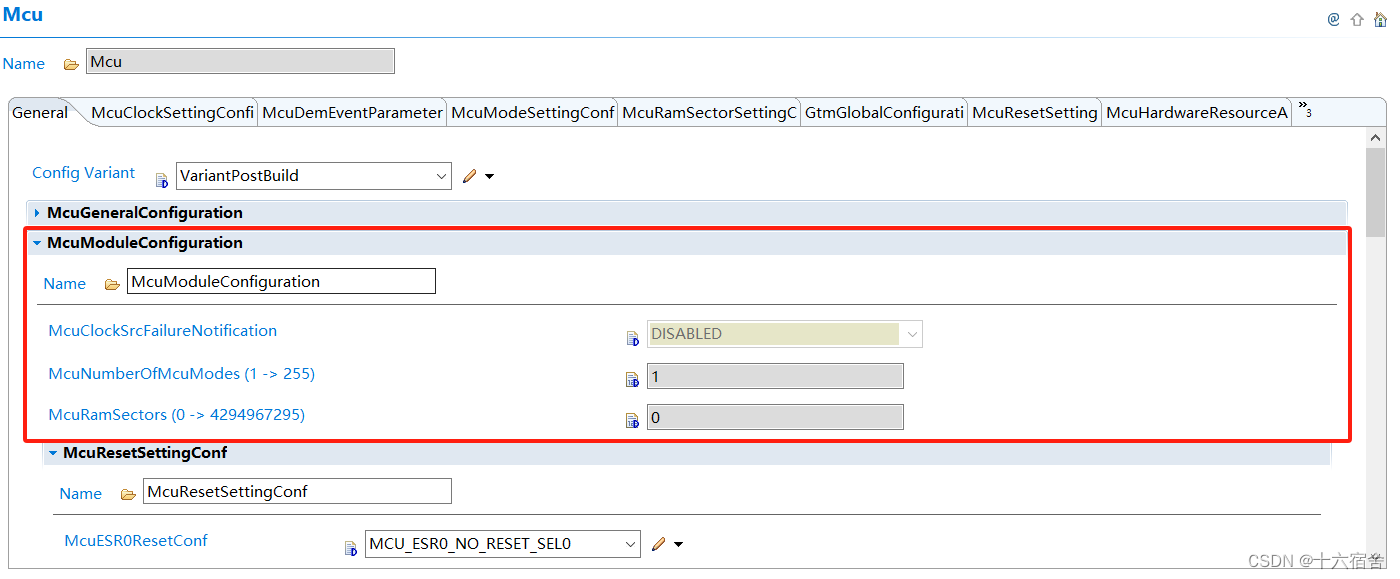
General:McuModuleConfiguration
这部分为MCU模式相关的通用配置,我们暂时不需要改动。
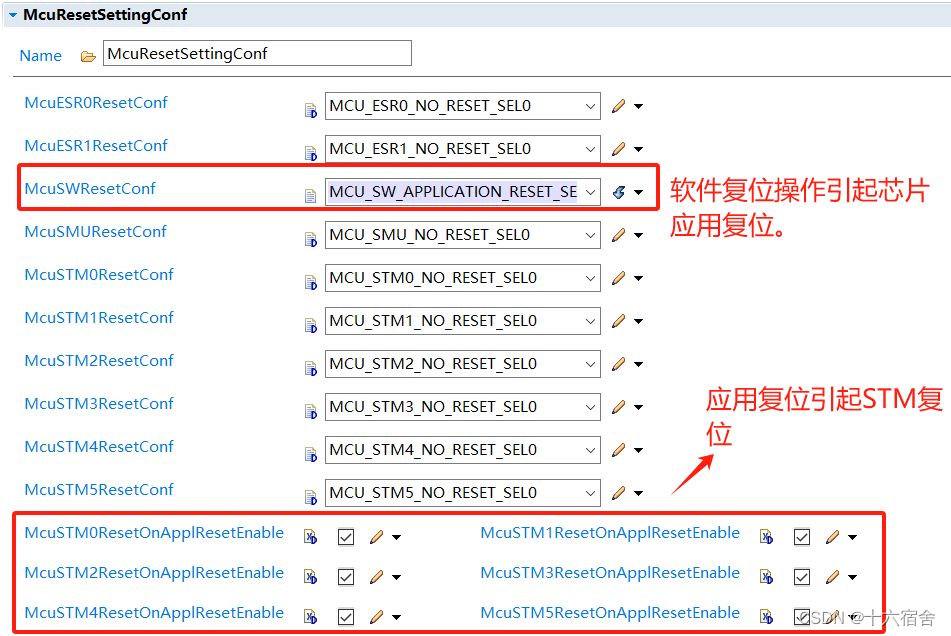
McuResetSettingConf
此部分包含芯片复位的配置,这部分我们需要修改的配置如下。
- McuSWResetConf ::软件复位选择导致的,有系统复位与应用复位,这里选择应用复位,应用复位后芯片的所有外设、CPU和部分SCU寄存器会回到初始状态,其他部分(如RAM,时钟)状态维持不变,影响范围比系统复位要小,也因此应用复位耗时最短。因为APP跳转Boot的是通过软件复位来实现的,为了保持编程标志位在RAM中的值,需要选择应用复位。
- McuSTMxResetOnApplResetEnable :STM定时器的计数值会在清零,重新计数。
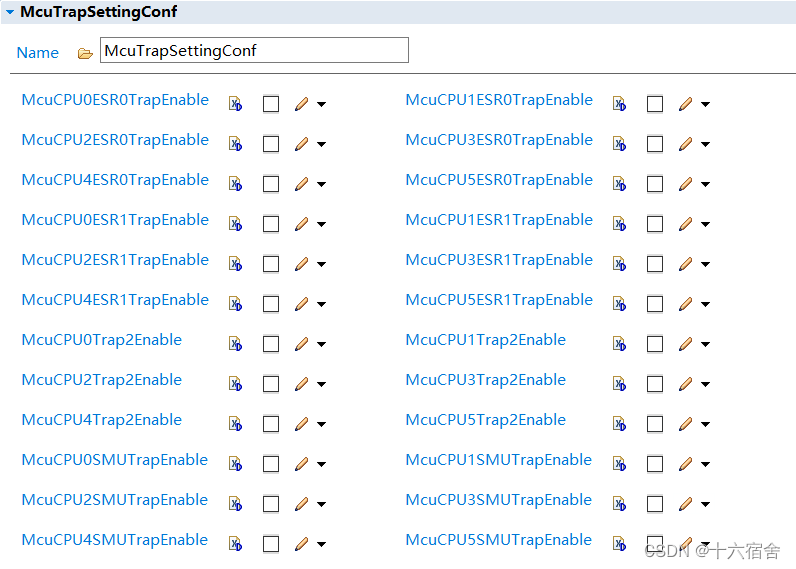
McuTrapSettingConf
这部分功能为各核心Trap使能相关配置,我们暂时不需要改动。
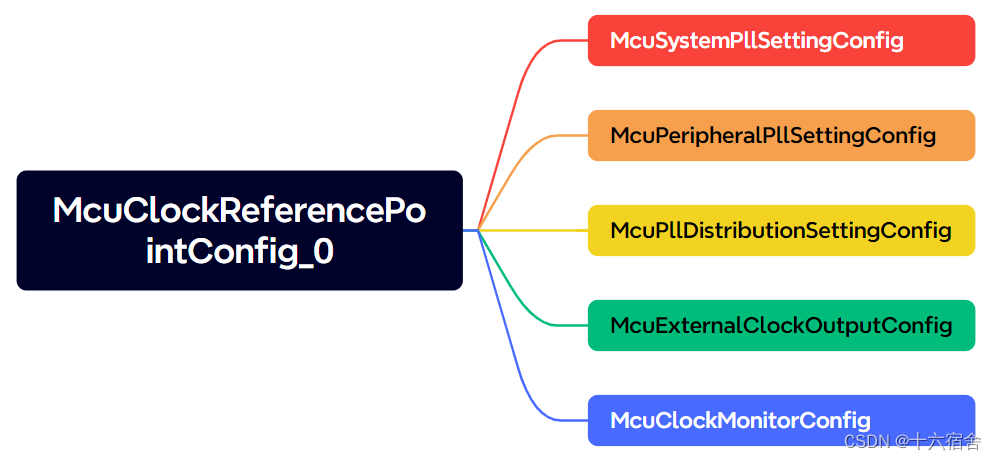
McuClockSettingConfig
这里是Mcu时钟配置的容器,其中主要包含了以下一些容器。
时钟系统本身是由不同的构建块组成的时钟树,下面是几个构建块包含的内容。
- Clock Source:时钟树源头,可以是外部晶振或者内部系统时钟。
- Clock speed up-scaling:时钟的缩放部分,主要由PLL(锁相环)构成。
- Clock distribution:时钟分配,由CCU负责。
- Individual clock configuration:单独的时钟配置,针对片内外设(Peripherals)。

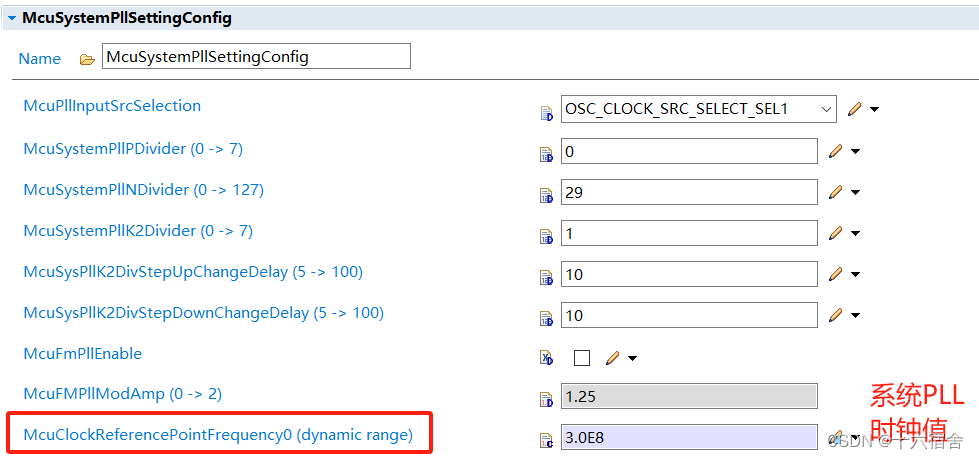
McuSystemPllSettingConfig
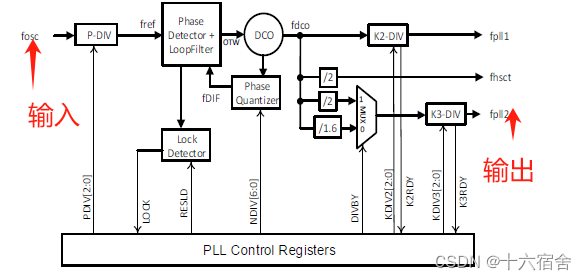
此容器包含系统锁相环的配置,主要完成对时钟源晶振频率的倍/分频,从而达到配置的频率。下图为系统PLL功能逻辑图。

需要注意的配置如下。
- McuClockReferencePointFrequency0:系统时钟,它的计算公式为Fpll =( (Fosc * (McuNDivider + 1)) / ((McuK2Divider+1)*(McuPDivider+1)))。
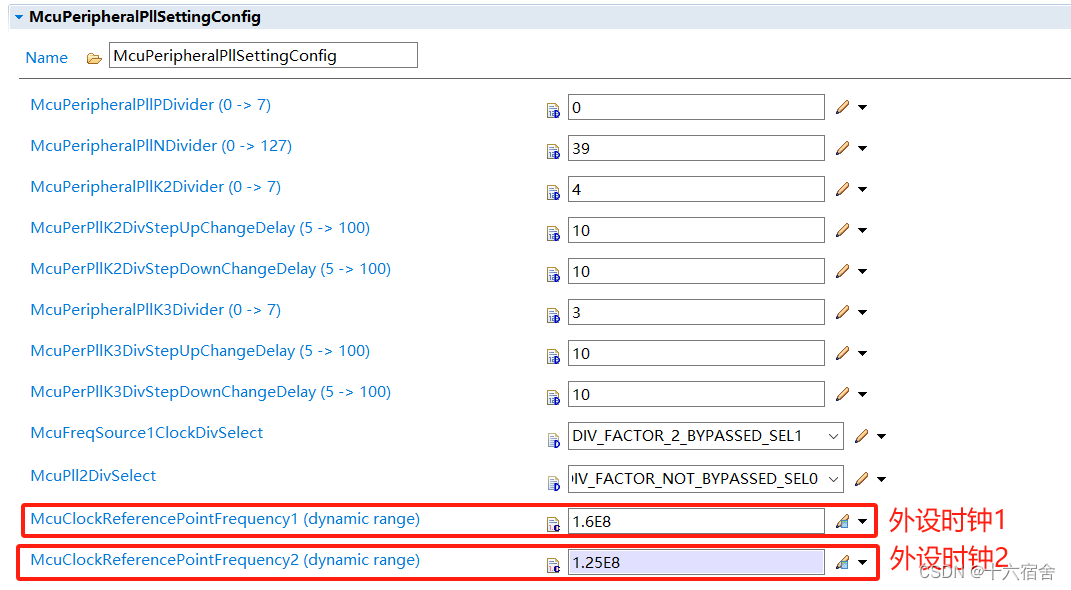
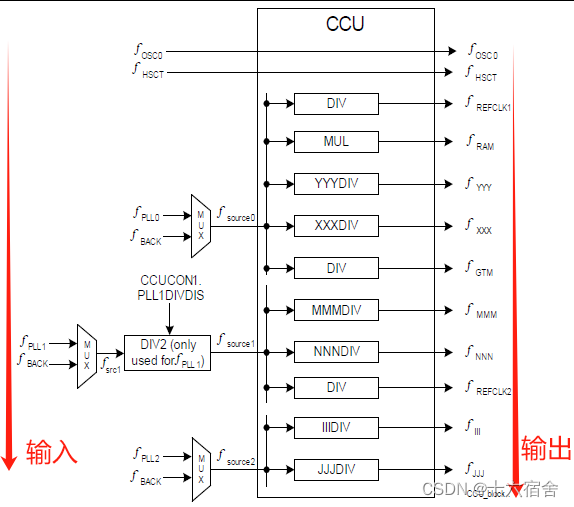
McuPeripheralPllSettingConfig
此容器包含外设PLL的配置,下图为对应的功能逻辑图。
这里我们主要关注下面的配置项。
- McuClockReferencePointFrequency1 (dynamic range):外设时钟1,Fpll1 =( (Fosc * (McuNDivider + 1)) / ((McuK2Divider+1)*(McuPDivider+1)))
- McuClockReferencePointFrequency2 (dynamic range):外设时钟2,Fpll2 =( (Fosc * (McuNDivider + 1)) / ((McuK3Divider+1)*(McuPDivider+1)))
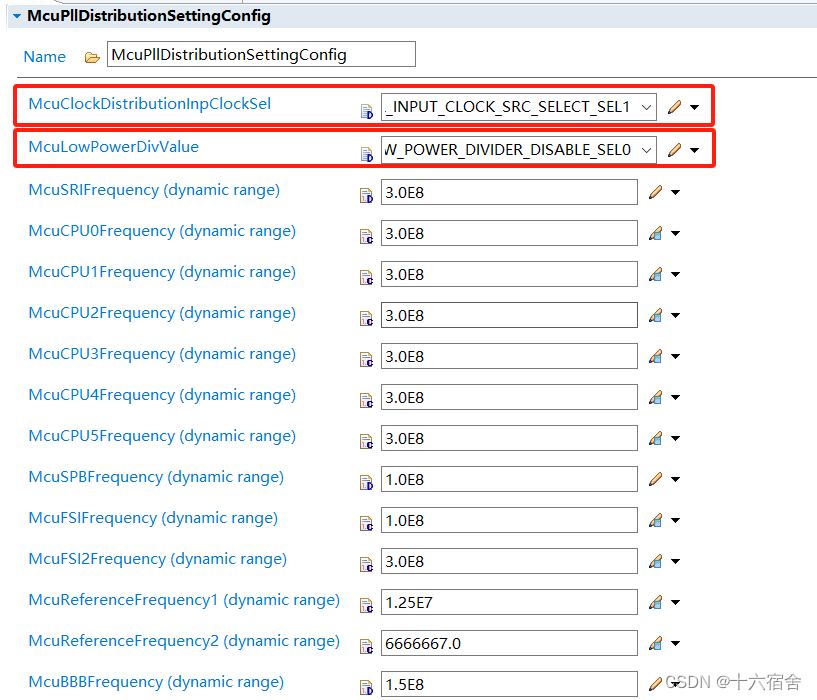
McuPllDistributionSettingConfig
这个容器包含在时钟树内的各种片内外设时钟配置。
这里需要我们首先注意的是以下的配置。
- McuClockDistributionInpClockSel:将备用时钟或者PLLx选为时钟分配单元输入,这里选用的是PLLx。
- McuLowPowerDivValue:这个参数定义了低功率分频特性是否启用。这里为不启用。
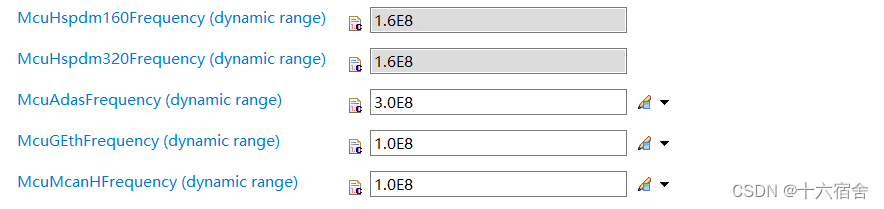
剩下的配置则对应了各个片内外设,我们用到哪里就需要关注那部分。

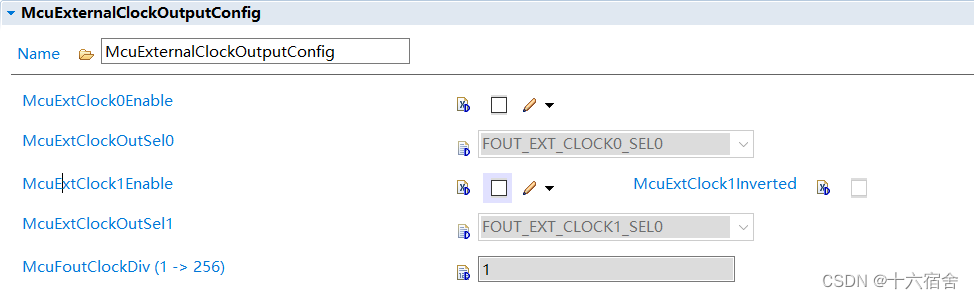
McuExternalClockOutputConfig
包含MCU外部时钟的配置参数,因为我们用的是外部晶振,这里就不涉及了。
McuClockMonitorConfig
这个容器定义了TC3xx时钟监视的配置,这里我们不需要改动。

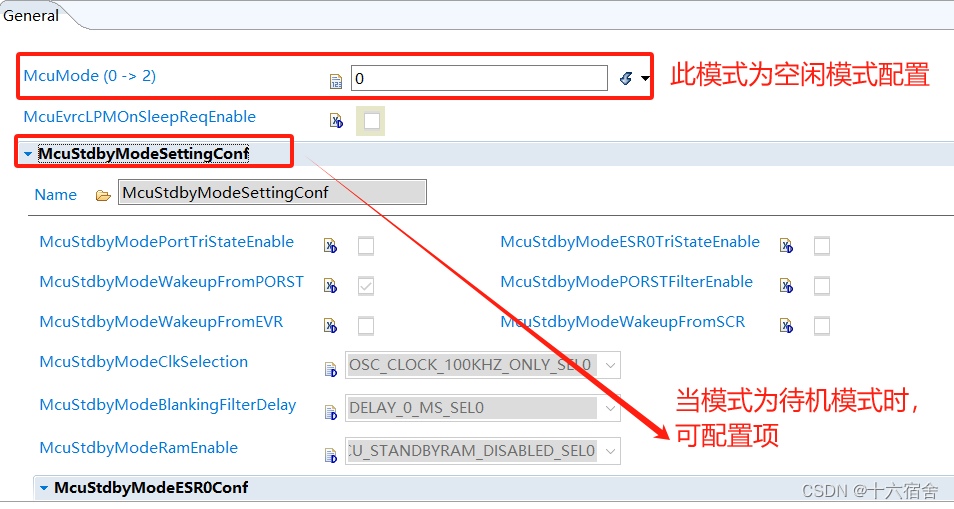
McuModeSettingConf
这个容器主要包含Mcu不同模式的配置集合。主要需要我们关注的为:
- McuMode:当前配置集合为空闲模式的集合,用于正常的程序运行。1为睡眠模式,2为待机模式。
McuDemEventParameter
这是一个容器,用于引用 DemEventParameter元素,这些元素使用Dem_ReportErrorStatus() API,以防发生相应的错误。EventId 取自引用的DemEventParameter的DemEventId符号名称。容器中提供了标准化错误,并且可以通过特定于供应商的错误引用进行扩展。这部分我们不需要修改。

McuRamSectorSettingConf
此部分容器包含初始化设置一部分RAM区域,通过Mcu_InitRamSection()函数来实现,我们没有使用。

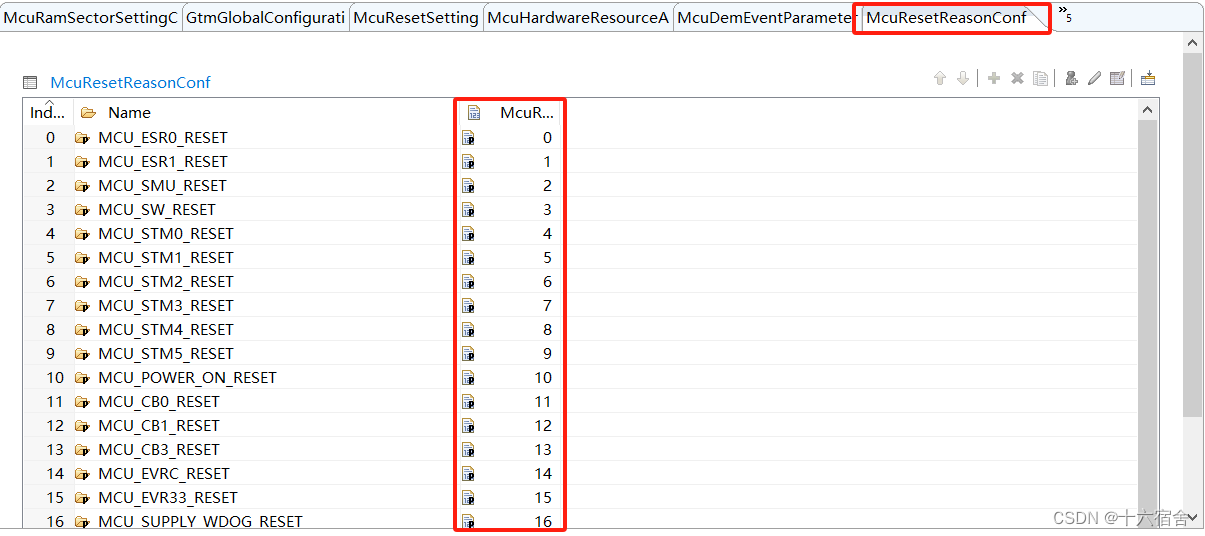
McuResetReasonConf
这里在配置完芯片类型,建立MCU模块,这部分重启原因配置就会生成了。用户可以通过Mcu_GetResetReason()获取重启原因。
MCU驱动使用与调试
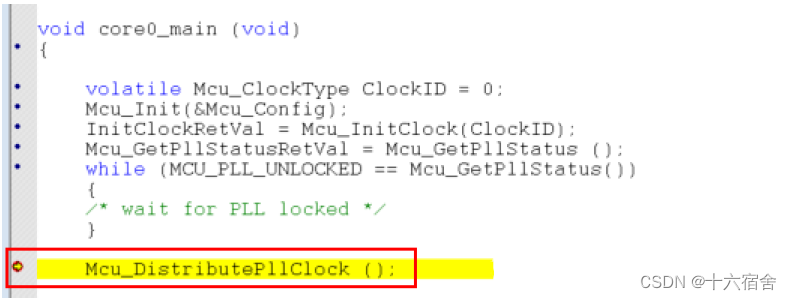
MCU驱动使用主要涉及的是系统时钟的初始化,首先调用Mcu_Init()初始化MCU通用配置,然后调用Mcu_InitClock()初始化芯片的时钟部分,最后使用Mcu_GetPllStatus()获取PLL状态,相位锁定之后(频率稳定),表示初始化完成,调用Mcu_DistributePllClock()将PLL时钟作为MCU时钟的源头。代码实现如下。
volatile Mcu_ClockType ClockID = 0;Mcu_Init(&Mcu_Config);Mcu_InitClock(ClockID);Mcu GetPllStatusRetVal=Mcu_GetPllStatus ();while (MCU_PLL_UNLOCKED == Mcu_GetPllStatus()){/* wait for PLL locked */}Mcu_DistributePllClock ();工程准备好之后,编译生成.elf文件然后将PLS正确与开发板相连(JTAG接口),然后打开UDE,与PLS连接上之后下载程序到办卡上,在Mcu_DistributePllClock ()接口前设置断点,如果能跑到这句话能初步说明PLL锁相环生成系统成功是OK的。
十六宿舍 原创作品,转载必须标注原文链接。
©2023 Yang Li. All rights reserved.
欢迎关注 『十六宿舍』,大家喜欢的话,给个👍,更多关于嵌入式相关技术的内容持续更新中。