本文介绍了如何设计和实现一个基于HC-SR04超声波传感器的避障机器人。我们将详细讨论硬件和电路连接,并提供完整的Arduino代码。该机器人可以利用超声波传感器检测周围的障碍物,并采取相应的动作进行避障,实现自主导航。
引言:
避障机器人是一种经常应用于自主导航和智能交通系统的机器人。HC-SR04超声波传感器作为一种常用的距离测量传感器,非常适合用于机器人的避障应用。本文将介绍如何使用HC-SR04传感器设计和实现一个简单的避障机器人。
材料和方法:
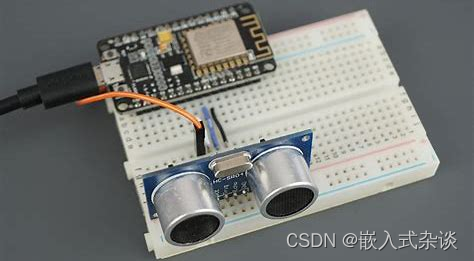
1. 硬件连线:
- 将HC-SR04的Trig引脚连接到Arduino的数字引脚2。
- 将HC-SR04的Echo引脚连接到Arduino的数字引脚3。
- 将机器人的电机驱动模块连接到Arduino的数字引脚4和5,用于控制机器人的移动。
2. Arduino代码:
请将以下代码复制并粘贴至Arduino开发环境中:
```c// 定义引脚const int trigPin = 2;const int echoPin = 3;const int motor1Pin1 = 4;const int motor1Pin2 = 5;// 定义变量long duration;int distance;void setup() {pinMode(trigPin, OUTPUT);pinMode(echoPin, INPUT);pinMode(motor1Pin1, OUTPUT);pinMode(motor1Pin2, OUTPUT);}void loop() {// 发射超声波digitalWrite(trigPin, LOW);delayMicroseconds(2);digitalWrite(trigPin, HIGH);delayMicroseconds(10);digitalWrite(trigPin, LOW);// 测量距离duration = pulseIn(echoPin, HIGH);distance = duration * 0.034 / 2;// 如果距离小于设定阈值,表示有障碍物if (distance < 20) {// 停止机器人digitalWrite(motor1Pin1, LOW);digitalWrite(motor1Pin2, LOW);delay(500);// 后退digitalWrite(motor1Pin1, HIGH);digitalWrite(motor1Pin2, LOW);delay(1000);// 停止机器人digitalWrite(motor1Pin1, LOW);digitalWrite(motor1Pin2, LOW);delay(500);// 左转digitalWrite(motor1Pin1, LOW);digitalWrite(motor1Pin2, HIGH);delay(1000);// 停止机器人digitalWrite(motor1Pin1, LOW);digitalWrite(motor1Pin2, LOW);delay(500);} else {// 前进digitalWrite(motor1Pin1, HIGH);digitalWrite(motor1Pin2, LOW);}}```结果和讨论:
在上述代码中,我们将HC-SR04超声波传感器与机器人的电机驱动模块连接并使用Arduino控制机器人的移动。在主循环中,我们首先发射超声波并测量回响时间,然后根据测得的距离判断是否有障碍物。当距离小于设定阈值(这里设定为20厘米)时,机器人将会执行避障动作:停止、后退、左转。否则,机器人将继续前进。
通过上传代码到Arduino并将电机和超声波传感器正确连接,您可以观察到机器人在检测到障碍物时自动避障的行为。您可以通过调整阈值和动作的延迟时间来适应不同的应用场景。
结论:
本文介绍了如何使用HC-SR04传感器设计和实现一个简单的避障机器人。通过与电机驱动模块的结合,机器人可以根据测得的距离进行避障动作,实现自主导航。该系统可以应用于各种需要避障功能的机器人项目中。
✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进
代码获取、问题探讨及文章转载可私信。
☁ 愿你的生命中有够多的云翳,来造就一个美丽的黄昏。
🍎获取更多嵌入式资料可点击链接进群领取,谢谢支持!👇
点击领取更多详细资料



![Hadoop(2):常见的MapReduce[在Ubuntu中运行!]](https://img-blog.csdnimg.cn/direct/e92fa12d952d40348d401129031dfced.png)