搬运机器人RFID传感器CNS-RFID-01|1S支持RS485通信,可支持RS485(MODBUS RTU)协议、RS485-HS协议,广泛应用于物流仓储,立库 AGV|无人叉车|搬送机器人等领域,常用定位、驻车等,本篇重点介绍CNS-RFID-01|1S RFID传感器的RS485通信连接方法。

1、RS485连接方法
用线缆将上位机与CNS-RFID-01|1S传感器进行以下的连接

2、通信设置
使用 RS485 通信分为两种协议,分别为 moudbus 协议和 HS 协议, 在确定所需要使用的协议后,需要先对 CNS-RFID-01/1S 进行设定后 再使用。 由于无法直接使用 RS485 对设备进行参数设定,需要通过电脑端 Hinson 配置软件进行参数配置。
具体配置连接见"配置参数",如下:


3、以 MOUDBUS 协议控制
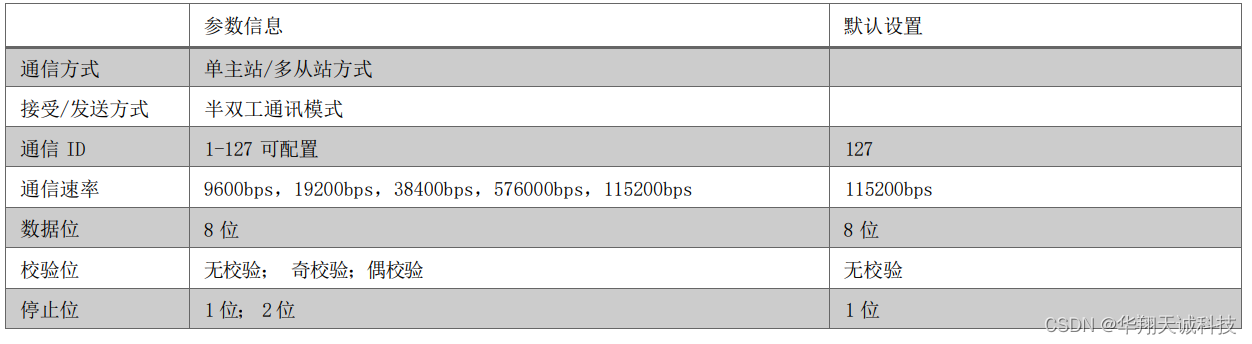
3.1 通讯规格

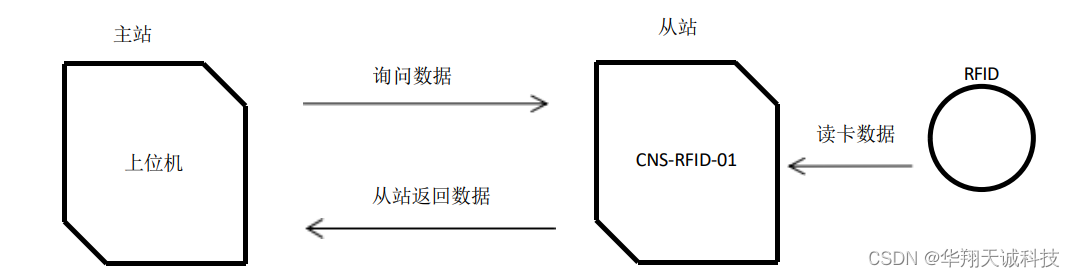
3.2 主从站通讯时序
Modbus 协议的通讯方式是单主站/多从站方式, 主站对 1 台从站传送询问, 从站执行处理,回复响应。

3.3 信息
3.3.1、信息格式

3.3.2、询问信息结构

●从站地址
指定的从站地址,通过配置软件配置后的从站传感器地址。
●功能码
传感器支持的功能码信息的长度如下表。

●资料
与设定功能码相关的资料
3.3.3、回应信息结构
从站接受到询问信息后,有是三种回应状态,分别是,正常回应,无回应和异常回应。 回应的信息结构和询问的信息结构一样。

●正常回应
从主站接收询问之后, 从站会执行要求的处理,回复响应。
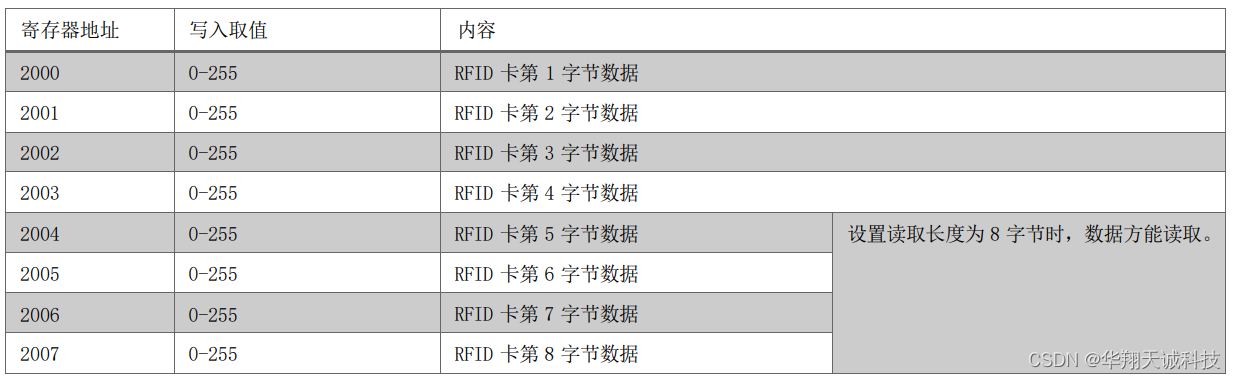
3.4 寄存器地址
写多个寄存器 写卡操作(16)
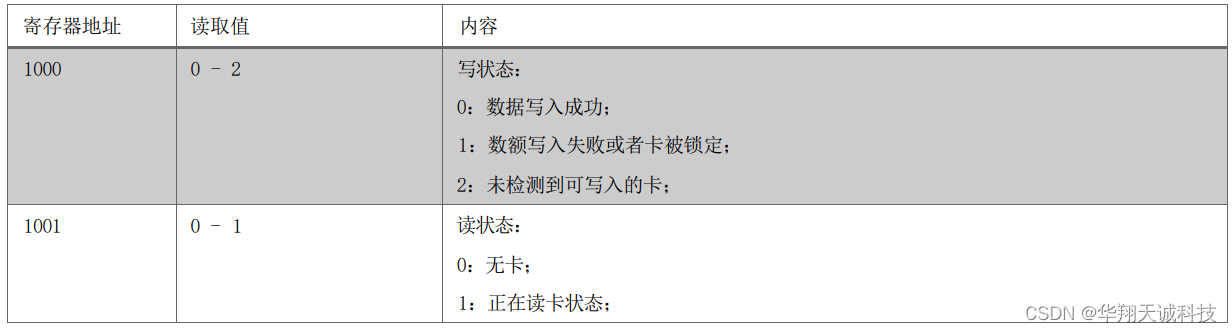
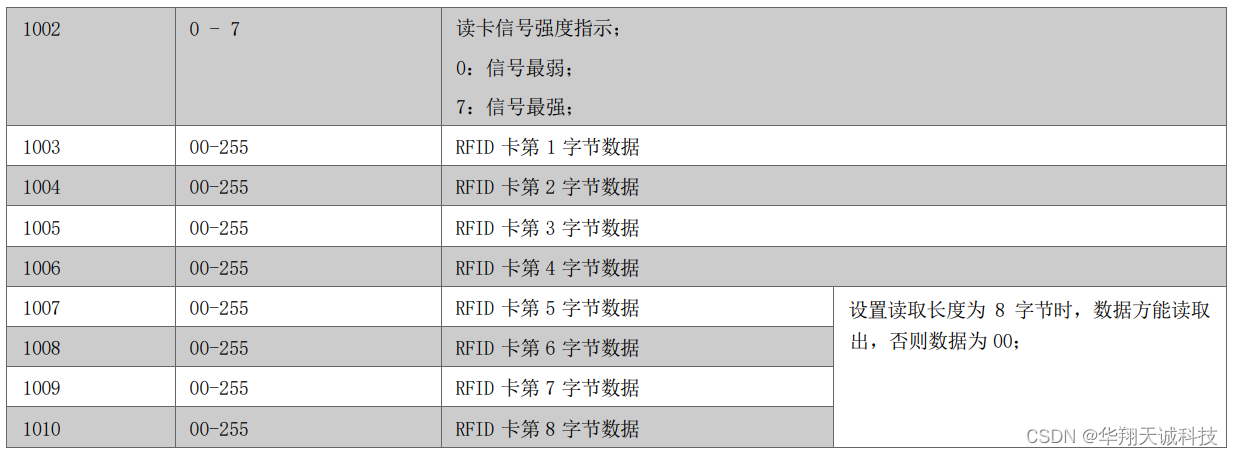
读输入寄存器(04)
RFID 传感器会自动记录保存最近一次读卡的数据, 以便上位机能够随时能够确定地标。
4、 以 HS 协议通讯
4.1 通讯规格
4.2 通讯协议
上位机可以对卡进行读写卡操作, 通信协议包括两部分, 读取卡数据和写入卡数据, 下面就对两种操作协议进行详细说明;
4.2.1、读取卡数据协议
4.2.1.1、读卡操作数据流程
4.2.1.2、主站询问数据
询问读卡数据格式

●标识位(5Byte)
0x52 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
4.2.1.3、从站返回数据
RFID 传感器处于询问模式返回数据


●标识位(5Byte)
0x52 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●读卡状态(1Byte)
0x00:RFID 传感器非读卡状态; 0x01:RFID 传感器正在读卡状态;
●卡信号强度(1Byte)
0x00-0x07:读取到卡信号强度, 0x00 信号强度最弱,0x07 信号强度为最强;
●卡数据(8Byte)
RFID 传感器会自动记录保存最近一次读卡的数据, 以便上位机能够随时能够确定地标。 设置读取数据长度为 4Byte 时:前 4Byte 为卡内有效数据, 后 4 字节的为无效数据 0x00; 设置读取数据长度为 8Byte 时: 8Byte 数据全部有效;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
4.2.2、写卡数据协议
4.2.2.1、写卡操作数据流程

4.2.2.2、主站发送数据
写入卡数据格式
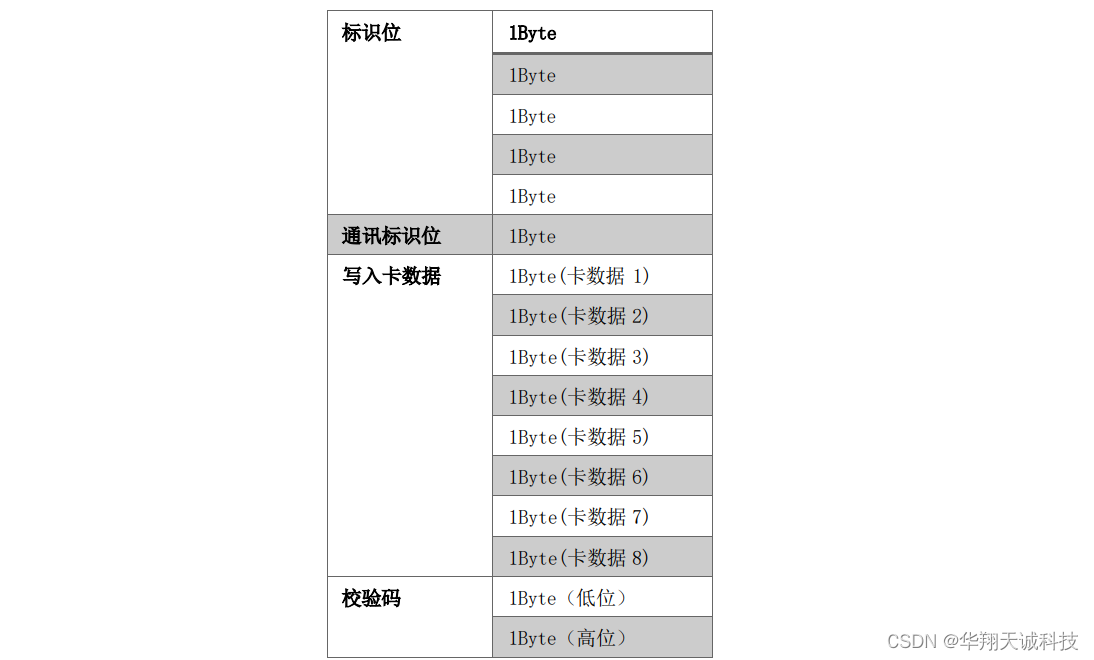
●标识位(5Byte)
0x57 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●卡数据(8Byte)
设置读取数据长度为 4Byte 时:前 4Byte 为卡内有效数据, 后 4 字节的为无效数据 0x00; 设置读取数据长度为 8Byte 时: 8Byte 数据全部有效;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
4.2.2.3、从站返回数据
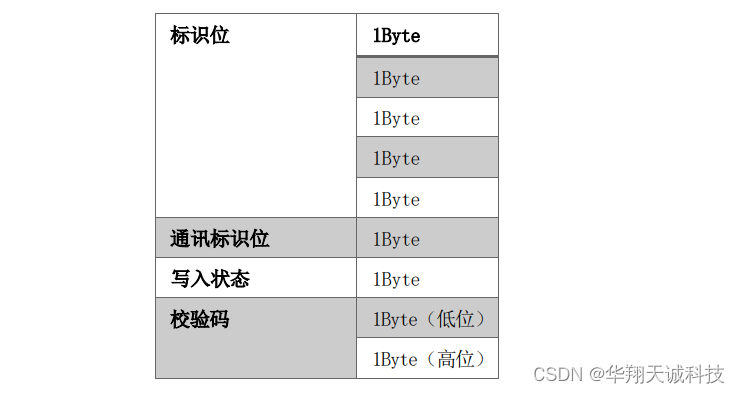
●标识位(5Byte)
0x57 0x43 0x6f 0x64 0x65
●通讯标识位(1Byte)
从站 RFID 传感器地址,范围在 0x01-0x7F;
●写入状态(1Byte)
14 0x00:写入成功; 0x01:写入错误或者卡内部被锁定; 0x02:未检测到可以写入的卡;
●校验码(2Byte)
CRC16 的运算后的结果。详情请查看校验码计算式。
更多关于搬运机器人RFID传感器CNS-RFID-01|1S的RS485(MODBUS|HS协议)通讯连接方法,华翔天诚科技欢迎您的咨询与交流!