#include<reg51.h> //包含单片机寄存器的头文件
#include<intrins.h> //包含_nop_()函数定义的头文件
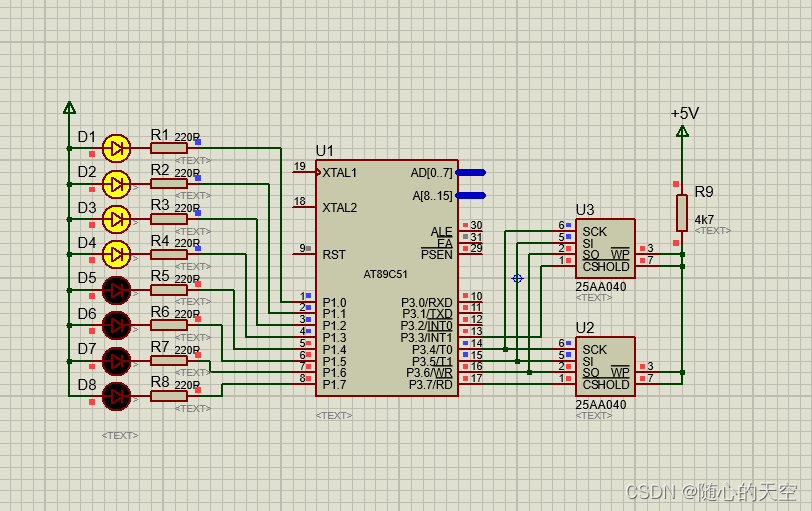
sbit SCK=P3^4; //将SCK位定义为P3.4引脚
sbit SI=P3^5; //将SI位定义为P3.5引脚
sbit SO=P3^6; //将SO位定义为P3.6引脚
sbit CS1=P3^7; //将CS定义为P3.7引脚
sbit CS2=P3^3; //将CS1位定义为P3.7引脚
#define WREN 0x06 //写使能锁存器允许
#define WRDI 0x04 //写使能锁存器禁止
#define READ 0x03 //读出
#define WRITE 0x02 //写入
/*****************************************************
函数功能:延时1ms
(3j+2)*i=(3×33+2)×10=1010(微秒),可以认为是1毫秒
***************************************************/
void delay1ms()
{
unsigned char i,j;
for(i=0;i<10;i++)
for(j=0;j<33;j++)
;
}
/*****************************************************
函数功能:延时若干毫秒
入口参数:n
***************************************************/
void delaynms(unsigned char n)
{
unsigned char i;
for(i=0;i<n;i++)
delay1ms();
}
/*****************************************************
函数功能:从X5045的当前地址读出数据
出口参数:x
***************************************************/
unsigned char ReadCurrent(void)
{
unsigned char i;
unsigned char x=0x00; //储存从X5045中读出的数据
SCK=1; //将SCK置于已知的高电平状态
for(i = 0; i < 8; i++)
{
SCK=1; //拉高SCK
SCK=0; //在SCK的下降沿输出数据
x<<=1; //将x中的各二进位向左移一位,因为首先读出的是字节的最高位数据
x|=(unsigned char)SO; //将SO上的数据通过按位“或“运算存入 x
}
return(x); //将读取的数据返回
}
/*****************************************************
函数功能:写数据到X5045的当前地址
入口参数:dat
***************************************************/
void WriteCurrent(unsigned char dat)
{
unsigned char i;
SCK=0; //将SCK置于已知的低电平状态
for(i = 0; i < 8; i++) // 循环移入8个位
{
SI=(bit)(dat&0x80); //通过按位“与”运算将最高位数据送到S
//因为传送时高位在前,低位在后
SCK=0;
SCK=1; //在SCK上升沿写入数据
dat<<=1; //将y中的各二进位向左移一位,因为首先写入的是字节的最高位
}
}
/*****************************************************
函数功能:写数据到第一个X5045的指定地址
入口参数:addr
***************************************************/
void WriteSet1(unsigned char dat,unsigned char addr)
{
CS2=1; //使第二个X5045的片选无效
SCK=0; //将SCK置于已知状态
CS1=0; //拉低CS,选中X5045
WriteCurrent(WREN); //写使能锁存器允许
CS1=1; //拉高CS
CS1=0; //重新拉低CS,否则下面的写入指令将被丢弃
WriteCurrent(WRITE); //写入指令
WriteCurrent(addr); //写入指定地址
WriteCurrent(dat); //写入数据
CS1=1; //拉高CS
SCK=0; //将SCK置于已知状态
}
/*****************************************************
函数功能:写数据到第二个X5045的指定地址
入口参数:addr
***************************************************/
void WriteSet2(unsigned char dat,unsigned char addr)
{
CS1=1; //使第一个X5045的片选无效
SCK=0; //将SCK置于已知状态
CS2=0; //拉低CS,选中X5045
WriteCurrent(WREN); //写使能锁存器允许
CS2=1; //拉高CS
CS2=0; //重新拉低CS,否则下面的写入指令将被丢弃
WriteCurrent(WRITE); //写入指令
WriteCurrent(addr); //写入指定地址
WriteCurrent(dat); //写入数据
CS2=1; //拉高CS
SCK=0; //将SCK置于已知状态
}
/*****************************************************
函数功能:从第一个X5045的指定地址读出数据
入口参数:addr
出口参数:dat
***************************************************/
unsigned char ReadSet1(unsigned char addr)
{
unsigned char dat;
CS2=1; //使第二个X5045的片选无效
SCK=0; //将SCK置于已知状态
CS1=0; //拉低CS,选中X5045
WriteCurrent(READ); //开始读
WriteCurrent(addr); //写入指定地址
dat=ReadCurrent(); //读出数据
CS1=1; //拉高CS
SCK=0; //将SCK置于已知状态
return dat; //返回读出的数据
}
/*****************************************************
函数功能:从第二个X5045的指定地址读出数据
入口参数:addr
出口参数:dat
***************************************************/
unsigned char ReadSet2(unsigned char addr)
{
unsigned char dat;
CS1=1; //使第一个X5045的片选无效
SCK=0; //将SCK置于已知状态
CS2=0; //拉低CS,选中X5045
WriteCurrent(READ); //开始读
WriteCurrent(addr); //写入指定地址
dat=ReadCurrent(); //读出数据
CS2=1; //拉高CS
SCK=0; //将SCK置于已知状态
return dat; //返回读出的数据
}
/*****************************************************
函数功能:看门狗复位程序
***************************************************/
void WatchDog1(void)
{
CS1=1; //拉高CS
CS1=0; //CS引脚的一个下降沿复位看门狗定时器
CS1=1; //拉高CS
}
/*****************************************************
函数功能:看门狗复位程序
***************************************************/
void WatchDog2(void)
{
CS2=1; //拉高CS
CS2=0; //CS引脚的一个下降沿复位看门狗定时器
CS2=1; //拉高CS
}
/*****************************************************
函数功能:主程序
***************************************************/
void main(void)
{
unsigned char x;
while(1)
{
WriteSet1(0xf0,0x10); //将数据“0xaa”写入第一个X5045的指定地址“0x10”
delaynms(10); //X5045的写入周期为约10ms
x=ReadSet1(0x10); //将数据从第一个X5045中的指定地址读出来
WriteSet2(x,0x20); //将数据x写入第二个X5045的指定地址“0x20
delaynms(10); //X5045的写入周期为约10ms
P1=ReadSet2(0x20); //将数据从第二个X5045中的指定地址读出来,送P1口显示
delaynms(100); //延时100ms
WatchDog1(); //复位第一个X5045的看门狗
WatchDog2(); //复位第二个X5045的看门狗
}
}