第九课:机器学习与人工智能、计算机视觉、自然语言处理 NLP及机器人
- 第三十四章:机器学习与人工智能
- 1、分类 Classification
- 2、做分类的算法 分类器 Classifier
- 3、用于分类的值是特征 Feature
- 4、特征值+种类叫做标记数据 Labeled data
- 5、决策边界 Decision boundaries
- 6、混淆矩阵 Confusion matrix
- 7、决策树 Decision tree
- 8、支持向量机 Support Vector Machines
- 9、人工神经网络 Artificial Neural Network
- 10、深度学习 Deep learning
- 11、弱AI, 窄AI Weak AI, Narrow AI
- 12、强AI Strong AI
- 13、强化学习 Reinforcement Learning
- 第三十五章:计算机视觉
- 1、颜色跟踪算法——跟踪一个像素
- 2、检测垂直边缘的算法
- 3、核/过滤器 kernel or filter
- 4、卷积 convolution
- 5、Prewitt 算子 Prewitt Operators
- 6、维奥拉·琼斯 人脸检测 Viola-Jones Face Detection
- 7、卷积神经网络 Convolutional Neural Networks
- 第三十六章:自然语言处理 NLP
- 1、过程
- 2、实现原理
- 3、音素 Phonemes
- 4、语音合成 Speech Synthesis
- 第三十七章:机器人
- 1、机器人发展中的例子
- 2、机器人控制的回路
- 3、机器人三定律 Three Laws of Robotics
各位小伙伴想要博客相关资料的话关注公众号:chuanyeTry即可领取相关资料!
第三十四章:机器学习与人工智能
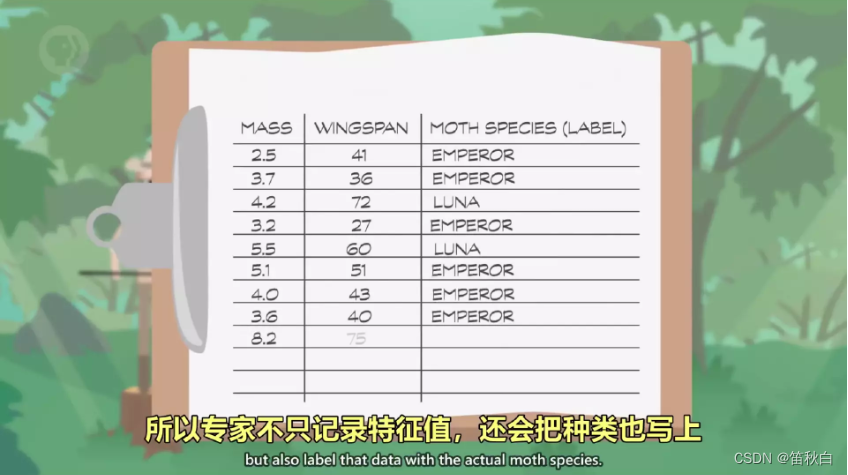
以区分飞蛾为例:
1、分类 Classification
2、做分类的算法 分类器 Classifier
3、用于分类的值是特征 Feature
4、特征值+种类叫做标记数据 Labeled data
标记数据如下。
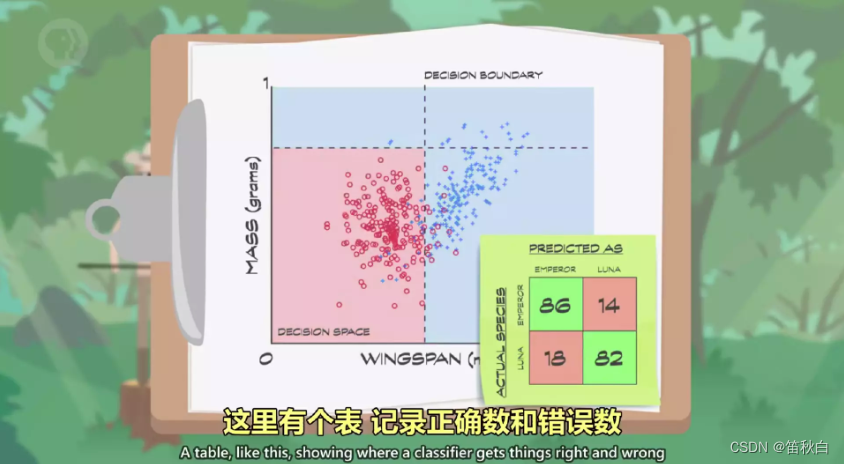
5、决策边界 Decision boundaries
虚线为决策边界如下。

6、混淆矩阵 Confusion matrix
右下角表为混淆矩阵。
7、决策树 Decision tree

8、支持向量机 Support Vector Machines
本质上是用任意线段来切分决策空间,不一定是直线。
9、人工神经网络 Artificial Neural Network
不用统计学的算法。模拟人类学习的过程,将数据进行加权求和修正等一系列处理。
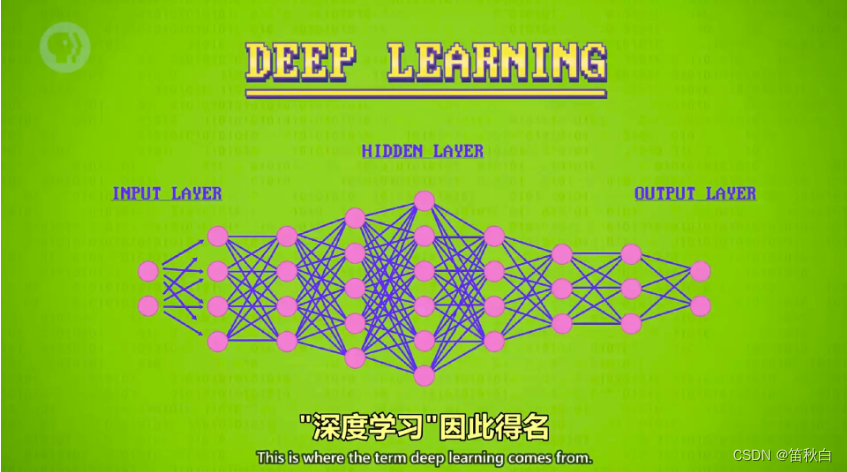
10、深度学习 Deep learning
得名原因:有很多的隐藏层。
11、弱AI, 窄AI Weak AI, Narrow AI
只能做指定内容的内容。
12、强AI Strong AI
通用的,和人一样智能的AI叫做强AI,目前没有人能做到。
13、强化学习 Reinforcement Learning
学习什么管用,什么不管用,自己发现成功的策略,这叫强化学习。
第三十五章:计算机视觉
1、颜色跟踪算法——跟踪一个像素
2、检测垂直边缘的算法
物体的边缘有多个色素,不适合颜色跟踪算法。要识别边缘,可以判断其两边像素的颜色差异程度。
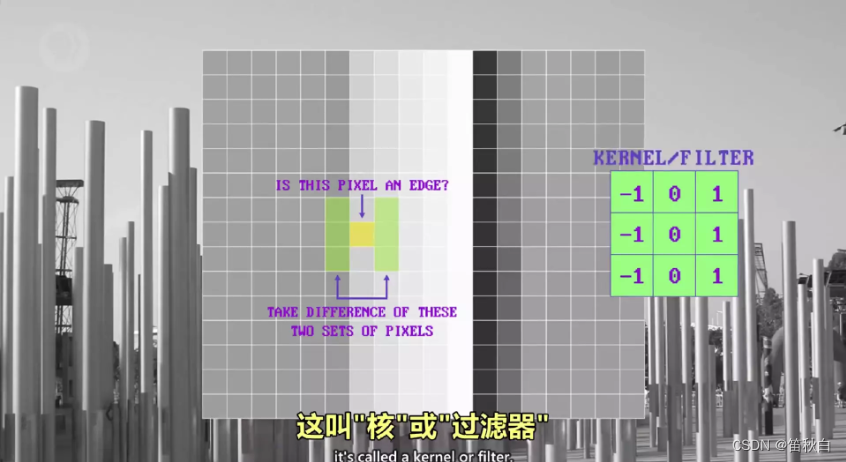
3、核/过滤器 kernel or filter
——用来检测垂直边缘的算法的数学符号,如下绿色的图。核或过滤器图示如下。
算法示例如下。
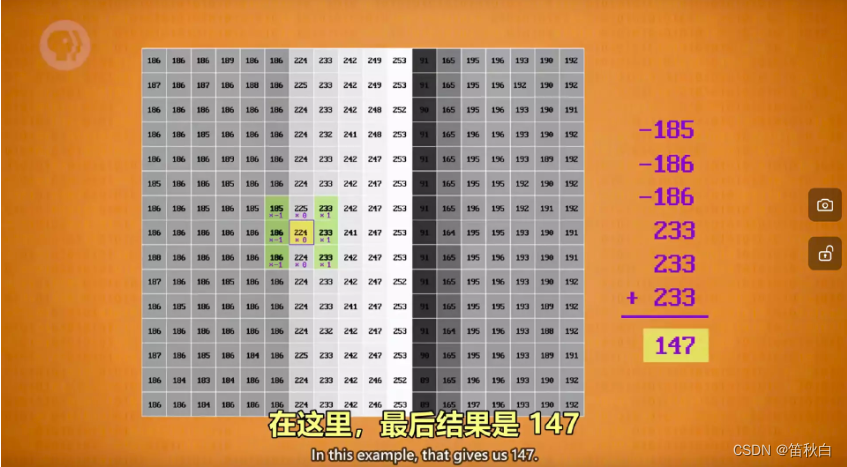
4、卷积 convolution
把核应用于像素块。
5、Prewitt 算子 Prewitt Operators
水平和垂直边缘增强的核叫Prewitt 算子。
6、维奥拉·琼斯 人脸检测 Viola-Jones Face Detection
7、卷积神经网络 Convolutional Neural Networks
用一层层不同的核来识别复杂场景,用脸来举例,先识别边缘,然后形状,器官…直至某一层把所有特征堆积在一起,识别出脸之后,可以进一步用其他算法定位面部标志,如眼睛和眉毛具体位置,从而判断心情等信息。
第三十六章:自然语言处理 NLP
1、过程
通过词性 Parts of speech和短语结构规则 Phrase structure rules构建分析树 Parse tree,并结合语言模型 Language Model来实现语音识别 Speech recognition。
2、实现原理
快速傅立叶变换 Fast Fourier Transform,把波形转换成频率。
3、音素 Phonemes
构成单词的声音片段。
4、语音合成 Speech Synthesis
第三十七章:机器人
1、机器人发展中的例子
法国吃饭鸭 - Digesting Duck, Canard Digerateur。
土耳其行棋傀儡,下国际象棋(假的,有人控制)。
第一台计算机控制的机器出现在1940年代晚期,叫数控机器, Computer Numerical Control(CNC)。
1960年 Unimate,第一个商业贩卖的可编程工业机器人。
2、机器人控制的回路
负反馈回路 negative feedback loop。
比例-积分-导数控制器 Proportional–Integral–Derivative controller PID 控制器。
通过控制三个值,比例值——实际值和理想值差多少,积分值——一段时间误差的总和,前两者用来修正错误:导数值(微分值)——期望值和实际值之间的变化率,用来避免未来的错误,这也叫预期控制,来控制进程。
3、机器人三定律 Three Laws of Robotics
——让机器人不要伤害人类。