什么是激光雷达
激光雷达(英文:Lidar),是一种通过发射激光束来测量目标位置、速度等特征量的雷达系统。其工作原理是将激光光束照射到目标物体上,然后通过测量激光光束从发射到反射回来的时间,来计算目标物体的距离、位置、速度等参数。激光雷达通常用于测量地形、地貌、建筑物等三维空间信息,以及用于无人驾驶汽车、无人机等智能交通工具的定位和避障。
问界M9激光雷达领先业界至少一代
问界M9搭载的激光雷达是192线束激光雷达。这是业界车规级量产最高线数激光雷达,被余承东称为“安全领先一代”。
问界M9搭载了业界领先的高阶智能驾驶技术,采用了“激光雷达+视觉感知”融合的解决方案。
-
具体来说,问界M9搭载了华为ADS 2.0,并配备了全新设计的192线激光雷达,这是业界车规级量产最高线数激光雷达。
-
此外,问界M9还搭载了3个毫米波雷达、11个侧向与前后向视觉感知高清摄像头、12个超声波雷达等组成了“融合感知系统”,可以实现全场景和全天候的感知。
-
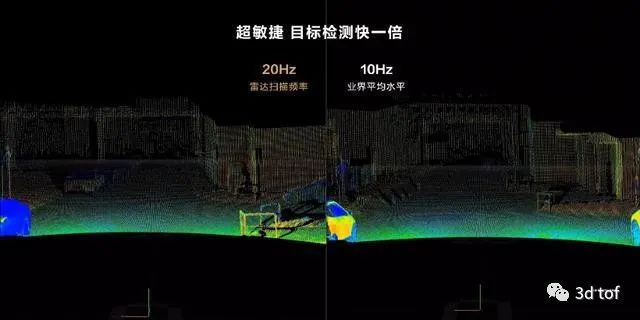
具有184万点/秒成像能力,雷达扫描频率达20Hz&