PPO简介
我们在之前的项目中介绍了基于价值的强化学习算法DQN,基于策略的强化学习算法REINFORCE,基于价值和策略的组合算法Actor-Critic. 对于基于策略分方法:参数化智能体的策略,并设计衡量策略好坏的目标函数,通过梯度上升的方法来最大化这个目标函数,使得策略最优。但是这种算法有一个明显的缺点:当策略网络是深度模型时,沿着策略梯度更新参数,很有可能由于步长太长,策略突然显著变差,进而影响训练效果。一种有效的解决方法是信任区域策略优化(trust region policy optimization,TRPO);然而TRPO的计算过程非常复杂,每一步更新的运算量非常大,进而其改进版算法PPO被提出。主流的PPO有两种,PPO-Penalty和PPO-Clip,但大量的实验表明PPO-Clip要更优秀一些,因此本项目采用PPO-Clip方法。
PPO算法
PPO算法用到了两个网络:策略网络,价值网络(actor-critic)。PPO是on-policy,交互的策略由我们的策略网络直接生成。需要注意的是,在训练时,我们仅使用上一轮策略的交互信息而不是过去所有的交互信息。具体的算法如下(来自论文《Proximal Policy Optimization Algorithms》):
1.导入依赖包
- paddle框架
- gym环境库
- matplotlib画图工具
- tqdm进度条显示
- numpy科学计算库
- random随机操作库
In [1]
import paddle
import paddle.nn.functional as F
import paddle.nn as nn
import gym
import matplotlib.pyplot as plt
from matplotlib import animation
from tqdm import tqdm
import numpy as np
import random/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/__init__.py:107: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop workingfrom collections import MutableMapping
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/rcsetup.py:20: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop workingfrom collections import Iterable, Mapping
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/colors.py:53: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop workingfrom collections import Sized2.定义策略网络、价值网络
- 策略网络:两个全连接层,最后的输出经过softmax函数处理(因为是动作是离散的)
- 价值网络:两个全连接层,输出是维度是1,表示'价值'
In [2]
class PolicyNet(paddle.nn.Layer):def __init__(self, state_dim, hidden_dim, action_dim):super(PolicyNet, self).__init__()self.fc1 = paddle.nn.Linear(state_dim, hidden_dim)self.fc2 = paddle.nn.Linear(hidden_dim, action_dim)def forward(self, x):x = F.relu(self.fc1(x))return F.softmax(self.fc2(x))class ValueNet(paddle.nn.Layer):def __init__(self, state_dim, hidden_dim):super(ValueNet, self).__init__()self.fc1 = paddle.nn.Linear(state_dim, hidden_dim)self.fc2 = paddle.nn.Linear(hidden_dim, 1)def forward(self, x):x = F.relu(self.fc1(x))return self.fc2(x)3.定义PPO智能体
- 首先定义优势计算函数compute_advantage
- 定义PPO算法类
- init:初始化函数,包括策略网络,价值网络,两个网络的优化器,折扣因子等参数
- take_action:动作抽样函数,使用分类分布函数Categorical
- update:网络的更新操作,clip方式
- save:保存网络,仅保存了策略网络
- load:加载网络,仅加载了策略网络
In [3]
# 计算优势advantage
def compute_advantage(gamma, lmbda, td_delta):td_delta = td_delta.detach().numpy()advantage_list = []advantage = 0.0for delta in td_delta[::-1]:advantage = gamma * lmbda * advantage + deltaadvantage_list.append(advantage)advantage_list.reverse()return paddle.to_tensor(advantage_list, dtype='float32')In [4]
class PPO:''' PPO-clip,采用截断方式 '''def __init__(self, state_dim, hidden_dim, action_dim, actor_lr, critic_lr,lmbda,epochs, eps, gamma):self.actor = PolicyNet(state_dim, hidden_dim, action_dim)self.critic = ValueNet(state_dim, hidden_dim)self.actor_optimizer = paddle.optimizer.Adam(parameters=self.actor.parameters(),learning_rate=actor_lr)self.critic_optimizer = paddle.optimizer.Adam(parameters=self.critic.parameters(),learning_rate=critic_lr)self.gamma = gammaself.lmbda = lmbdaself.epochs = epochs # 一条序列的数据用于训练轮数self.eps = eps # PPO中截断范围的参数def take_action(self, state):state = paddle.to_tensor(state, dtype='float32')probs = self.actor(state)action_dist = paddle.distribution.Categorical(probs)action = action_dist.sample([1])return action.numpy()[0]def update(self, transition_dict):states = paddle.to_tensor(transition_dict['states'],dtype='float32')actions = paddle.to_tensor(transition_dict['actions']).reshape([-1, 1])rewards = paddle.to_tensor(transition_dict['rewards'],dtype='float32').reshape([-1, 1])next_states = paddle.to_tensor(transition_dict['next_states'],dtype='float32')dones = paddle.to_tensor(transition_dict['dones'],dtype='float32').reshape([-1, 1])td_target = rewards + self.gamma * self.critic(next_states) * (1 -dones)td_delta = td_target - self.critic(states)advantage = compute_advantage(self.gamma, self.lmbda,td_delta)old_log_probs = paddle.log(self.actor(states).gather(axis=1,index=actions)).detach()for _ in range(self.epochs):log_probs = paddle.log(self.actor(states).gather(axis=1, index=actions))ratio = paddle.exp(log_probs - old_log_probs)surr1 = ratio * advantagesurr2 = paddle.clip(ratio, 1 - self.eps,1 + self.eps) * advantage # 截断actor_loss = paddle.mean(-paddle.minimum(surr1, surr2)) # PPO损失函数critic_loss = paddle.mean(F.mse_loss(self.critic(states), td_target.detach()))self.actor_optimizer.clear_grad()self.critic_optimizer.clear_grad()actor_loss.backward()critic_loss.backward()self.actor_optimizer.step()self.critic_optimizer.step()def save(self):paddle.save(self.actor.state_dict(),'net.pdparams')def load(self):layer_state_dict = paddle.load("net.pdparams")self.actor.set_state_dict(layer_state_dict) 4.参数定义
In [5]
actor_lr = 1e-3 #策略网络的学习率
critic_lr = 1e-2 #价值网络的学习率
num_episodes = 100 # 训练的episode,不宜训练太长,否则性能下降
hidden_dim = 128 #网络隐藏层
gamma = 0.98 # 折扣因子
lmbda = 0.95 # 优势计算中的参数
epochs = 10 #每次更新时ppo的更新次数
eps = 0.2 # PPO中截断范围的参数env_name = 'CartPole-v0'
env = gym.make(env_name)
# env.seed(100)
# paddle.seed(100)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
5.训练
on-policy的训练方式,每次更新网络仅使用该轮的交互信息。我们使用tqdm来显示训练进度,并绘制奖励曲线图。
In [6]
def train_on_policy_agent(env, agent, num_episodes):return_list = []maxre=0for i in range(10):with tqdm(total=int(num_episodes/10), desc='Iteration %d' % i) as pbar:for i_episode in range(int(num_episodes/10)):episode_return = 0transition_dict = {'states': [], 'actions': [], 'next_states': [], 'rewards': [], 'dones': []}state = env.reset()done = Falsewhile not done:action = agent.take_action(state)next_state, reward, done, _ = env.step(action)transition_dict['states'].append(state)transition_dict['actions'].append(action)transition_dict['next_states'].append(next_state)transition_dict['rewards'].append(reward)transition_dict['dones'].append(done)state = next_stateepisode_return += reward# 保存最大epoisde奖励的参数if maxre<episode_return:maxre=episode_returnagent.save()return_list.append(episode_return)agent.update(transition_dict)if (i_episode+1) % 10 == 0:pbar.set_postfix({'episode': '%d' % (num_episodes/10 * i + i_episode+1), 'return': '%.3f' % np.mean(return_list[-10:])})pbar.update(1)return return_listppo_agent = PPO(state_dim, hidden_dim, action_dim, actor_lr, critic_lr, lmbda,epochs, eps, gamma)
return_list = train_on_policy_agent(env, ppo_agent, num_episodes)
W0907 13:17:20.133046 220 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 10.1
W0907 13:17:20.138145 220 device_context.cc:465] device: 0, cuDNN Version: 7.6.
Iteration 0: 0%| | 0/10 [00:00<?, ?it/s]/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/paddle/tensor/creation.py:130: DeprecationWarning: `np.object` is a deprecated alias for the builtin `object`. To silence this warning, use `object` by itself. Doing this will not modify any behavior and is safe.
Deprecated in NumPy 1.20; for more details and guidance: https://numpy.org/devdocs/release/1.20.0-notes.html#deprecationsif data.dtype == np.object:
Iteration 0: 100%|██████████| 10/10 [00:00<00:00, 30.27it/s, episode=10, return=17.200]
Iteration 1: 100%|██████████| 10/10 [00:00<00:00, 33.77it/s, episode=20, return=12.700]
Iteration 2: 100%|██████████| 10/10 [00:00<00:00, 32.58it/s, episode=30, return=14.800]
Iteration 3: 100%|██████████| 10/10 [00:00<00:00, 27.85it/s, episode=40, return=25.100]
Iteration 4: 100%|██████████| 10/10 [00:00<00:00, 19.99it/s, episode=50, return=51.500]
Iteration 5: 100%|██████████| 10/10 [00:00<00:00, 13.89it/s, episode=60, return=94.300]
Iteration 6: 100%|██████████| 10/10 [00:00<00:00, 12.93it/s, episode=70, return=105.400]
Iteration 7: 100%|██████████| 10/10 [00:00<00:00, 12.35it/s, episode=80, return=112.400]
Iteration 8: 100%|██████████| 10/10 [00:00<00:00, 11.47it/s, episode=90, return=125.500]
Iteration 9: 100%|██████████| 10/10 [00:00<00:00, 13.76it/s, episode=100, return=97.400]In [7]
def moving_average(a, window_size):cumulative_sum = np.cumsum(np.insert(a, 0, 0)) middle = (cumulative_sum[window_size:] - cumulative_sum[:-window_size]) / window_sizer = np.arange(1, window_size-1, 2)begin = np.cumsum(a[:window_size-1])[::2] / rend = (np.cumsum(a[:-window_size:-1])[::2] / r)[::-1]return np.concatenate((begin, middle, end))episodes_list = list(range(len(return_list)))
mv_return = moving_average(return_list, 19)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('PPO on {}'.format(env_name))
plt.show()/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/cbook/__init__.py:2349: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop workingif isinstance(obj, collections.Iterator):
/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/cbook/__init__.py:2366: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop workingreturn list(data) if isinstance(data, collections.MappingView) else data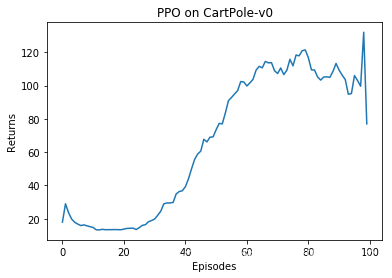
<Figure size 432x288 with 1 Axes>
6.验证
我们使用保存的网络参数初始化一个新的策略网络,并用这个新的策略网络在CartPole环境上进行实验。我们可以通过打印环境回合是否结束来大致判断策略网络的好坏(done=false的回合数越大说明策略学习的越好)。由于ai studio好像不支持gym环境的可视化,运行'''env.render(mode="rgb_array")'''会报错,因此我们仅展示但不运行可视化的代码,可在本地进行运行。我们将本地运行结果附在下方直观的展示PPO的训练结果。

打印环境回合是否结束:
In [8]
actor=PolicyNet(4,128,2)
layer_state_dict = paddle.load("net.pdparams")
actor.set_state_dict(layer_state_dict)env=gym.make('CartPole-v0')state=env.reset()
frames = []
for i in range(200):state=paddle.to_tensor(state,dtype='float32')action =actor(state).numpy()#action=action.numpy()[0]#print(action)next_state,reward,done,_=env.step(np.argmax(action))if i%10==0:print(i," ",reward,done)state=next_stateenv.close()
0 1.0 False 10 1.0 False 20 1.0 False 30 1.0 False 40 1.0 False 50 1.0 False 60 1.0 False 70 1.0 False 80 1.0 False 90 1.0 False 100 1.0 False 110 1.0 False 120 1.0 False 130 1.0 False 140 1.0 False 150 1.0 False 160 1.0 False 170 1.0 False 180 1.0 False 190 1.0 False
可视化代码,可在本地运行
actor=PolicyNet(4,128,2)
layer_state_dict = paddle.load("net.pdparams")
actor.set_state_dict(layer_state_dict)def save_frames_as_gif(frames, filename):#Mess with this to change frame sizeplt.figure(figsize=(frames[0].shape[1]/100, frames[0].shape[0]/100), dpi=300)patch = plt.imshow(frames[0])plt.axis('off')def animate(i):patch.set_data(frames[i])anim = animation.FuncAnimation(plt.gcf(), animate, frames = len(frames), interval=50)anim.save(filename, writer='pillow', fps=60)env=gym.make('CartPole-v0')state=env.reset()
frames = []
for i in range(200):#print(env.render(mode="rgb_array"))frames.append(env.render(mode="rgb_array"))state=paddle.to_tensor(state,dtype='float32')action =actor(state).numpy()#action=action.numpy()[0]#print(action)next_state,reward,done,_=env.step(np.argmax(action))if i%50==0:print(i," ",reward,done)state=next_statesave_frames_as_gif(frames, filename="CartPole.gif")env.close()
7.总结
本项目是基于策略的强化学习算法PPO。受于本人认知水平等因素影响,在该项目中可能存在不严谨、甚至错误的地方,还请大家批评指正。

![python调用openai api报错self._sslobj.do_handshake()OSError: [Errno 0] Error](https://img-blog.csdnimg.cn/direct/edd1e8c626554ae09829c83f4874e811.png#pic_center)