文章目录
- 环境:
- 1.1 体元法介绍:
- 2.1 python代码
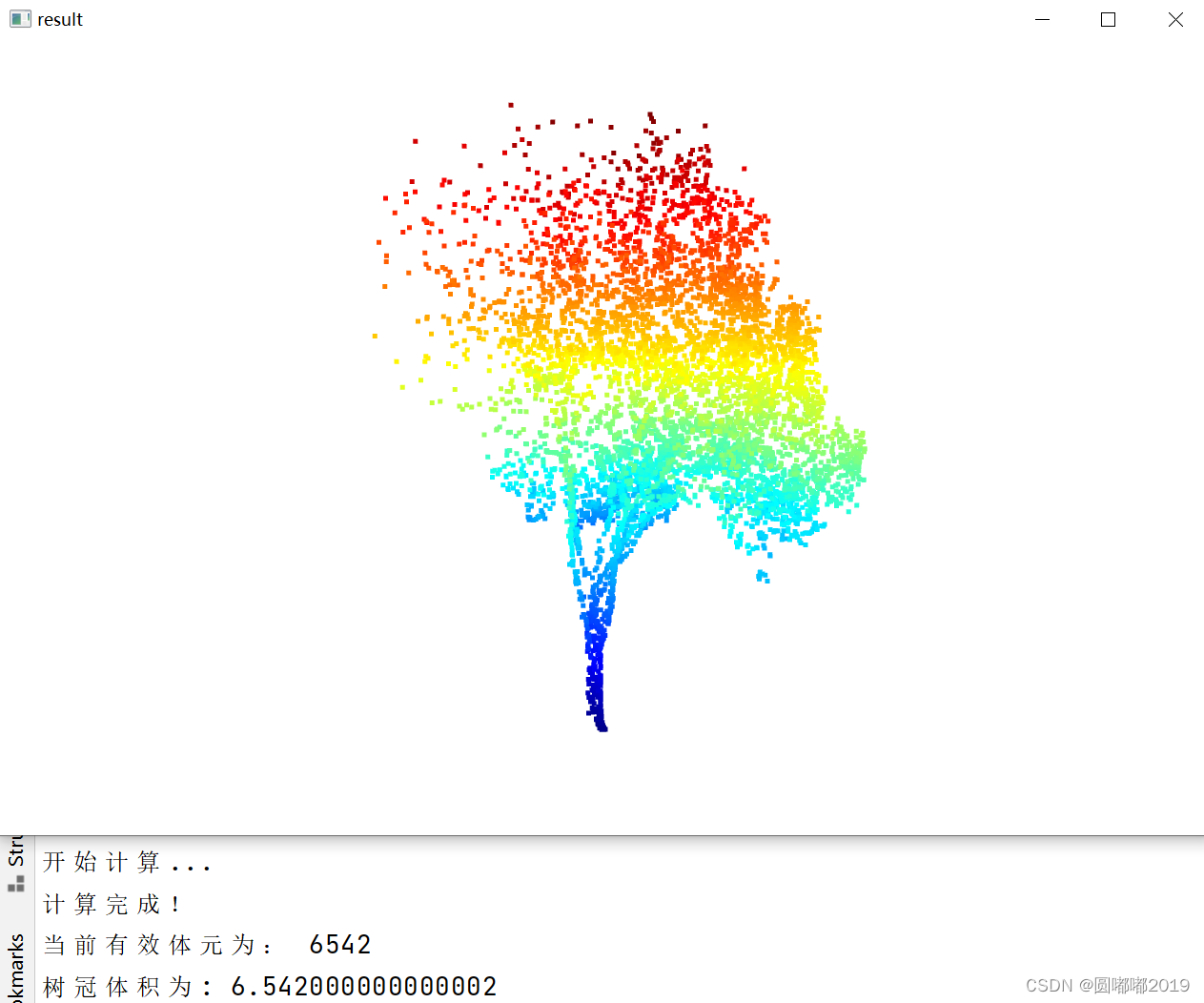
- 3.1 可视化
环境:
Open3D
1.1 体元法介绍:
用一个个体素去占据点云,然后对所有体素求和
2.1 python代码
conda activete deeplabv3plus(环境名称–安装好open3D的)
python demo.py
import open3d as o3d
import numpy as npdef draw_point_cloud(result, batch=False):if not batch:for i in range(len(result)):o3d.visualization.draw_geometries([result[i]], "result", 800, 600,50, 50, False, False, True)else:o3d.visualization.draw_geometries(result, "result", 800, 600,50, 50, False, True, True)def main():# 读取点云数据pc = o3d.io.read_point_cloud("../../TestData/Pr1.pcd")# 体元累加法d = 0.1 # 体元的大小min_bound = pc.get_min_bound()max_bound = pc.get_max_bound()x_min, x_max = min_bound[0], max_bound[0]y_min, y_max = min_bound[1], max_bound[1]z_min, z_max = min_bound[2], max_bound[2]# 创建体元print("开始计算...")row = int(np.ceil((x_max - x_min) / d) + 1)col = int(np.ceil((y_max - y_min) / d) + 1)height = int(np.ceil((z_max - z_min) / d) + 1)flags = np.zeros((row, col, height), dtype=bool)for i in range(len(pc.points)):x, y, z = pc.points[i]m = int(np.floor((x - x_min) / d))n = int(np.floor((y - y_min) / d))k = int(np.floor((z - z_min) / d))flags[m, n, k] = Truecount = np.sum(flags)print("计算完成!")v = d * d * d * countprint("当前有效体元为:", count)print("树冠体积为:", v)result = [pc]draw_point_cloud(result, False)input("按任意键继续...")if __name__ == "__main__":main()3.1 可视化