文章目录
- 介绍
- 研究现状
- 主流相关定义
- 国标定义
- SAE定义
- WP29定义
- ODD主流构建框架
- NHTSA ODD构建框架
- SAE AVSC ODD构建框架
- PEGASUS 6层模型
- BSI ODD构建框架
- 设计运行条件的原则
- ODC 的设计原则
- ODC 元素的制定原则
- ODC 的使用原则
- 设计运行条件元素
- ODD 元素
- 驾乘人员状态4
- 车辆状态
- ODC 描述示例
- ODC 描述示例一
- ODC 描述示例二
介绍
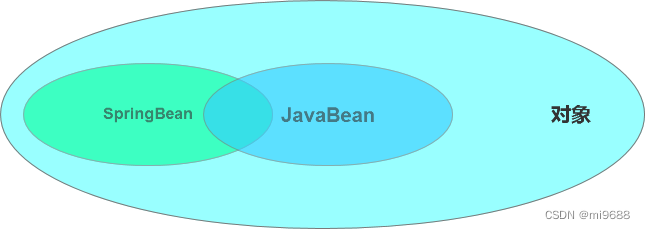
设计运行范围 —— Operational Design Domain(ODD)。驾驶自动化系统设计时确定的适用于其功能运行的外部环境条件。
设计运行条件 —— Operational Design Condition(ODC)。驾驶自动化系统设计时确定的适用于其功能运行的各类条件的总称,包括设
计运行范围、车辆状态、驾乘人员状态及其他必要条件。
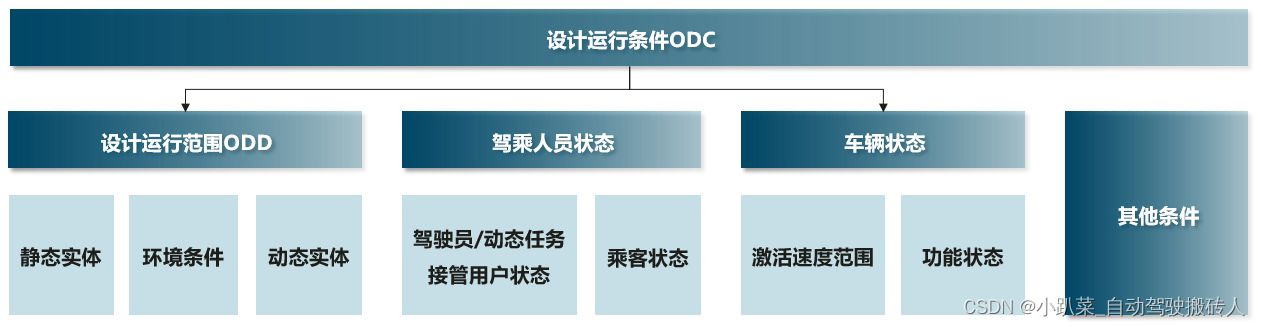
如下图所示,ODC 是ODD 的超集,在ODD 条件的基础上进一步增加自动驾驶安全启动和运行的内部条件,如驾乘人员状态、车辆状态和其他必要条件。对ODC 中ODD、驾乘人员状态、车辆状态的必要性分析如下:
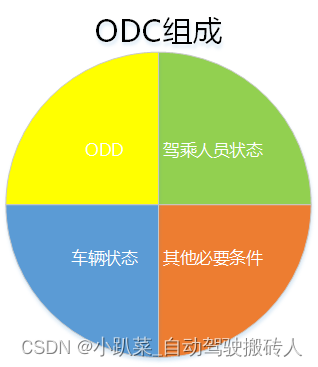
1. ODD:自动驾驶系统安全启动和运行的外部环境条件。不同自动驾驶系统启动、运行的外部适用范围不一样:如高速下的自动驾驶系统,A 系统只能在白天启动和运行,B 系统能够在白天和晴朗的夜晚启动和运行。
2. 驾乘人员状态:驾乘人员包括驾驶员/动态驾驶任务后援用户和乘客。为使自动驾驶系统及时被接管,需要对动态驾驶任务后援用户进行监测,要求动态驾驶任务后援用户的状态满足接管的条件,如不存在疲劳、酒驾等状态;为使驾乘人员满足基本的安全要求,需要对驾乘人员进行监测,如安全带监测;为使自动驾驶系统能够安全运行,需要对乘客抢夺自动驾驶设备的行为进行监测。
3. 车辆状态:包括车辆速度和功能状态。车辆速度包括激活速度范围,通过激活速度范围判断此刻自动驾驶系统是否能够被激活。另一方面,自动驾驶系统启动、运行的前提条件之一是车辆状态能够达到自动驾驶系统的安全启动和运行的要求。如高速下的自动驾驶系统需要具备功能自检能力,并在启动前需要进行功能自检,要求感知功能状态、定位功能状态和计算功能状态等满足系统设计要求。
综上所述,只有当上述ODD、驾乘人员状态、车辆状态等全部条件都满足的时候自动驾驶系统才能正常启动和安全运行。相反,欠缺任何一个前提条件,该自动驾驶系统都有可能无法启动或者无法安全运行(包括运行时功能降级),或者导致动态驾驶任务后援用户因接管不及时而造成危险。
研究现状
主流相关定义
国标定义
设计运行条件 —— Operational Design Condition。驾驶自动化系统设计时确定的适用于其功能运行的各类条件的总称,包括设计运行范围、驾乘人员状态及其他必要条件。
设计运行范围 —— Operational Design Domain。驾驶自动化系统设计时确定适用于其功能运行的外部环境条件。典型的外部环境条件有道路、交通、天气、光照等。
SAE定义
设计运行范围 —— Operational Design Domain。特定的驾驶自动化系统或其功能的运行条件,包括但不限于环境、地理和时间限制,以及拥有特定条件的交通或道路。
WP29定义
设计运行条件 —— Operational Design Condition。自动驾驶系统可以工作的所有设计条件,包括但不限于设计运行范围、车辆状态、驾驶员和乘客状态。ODD 为车辆的外部环境条件。
ODD主流构建框架
NHTSA ODD构建框架
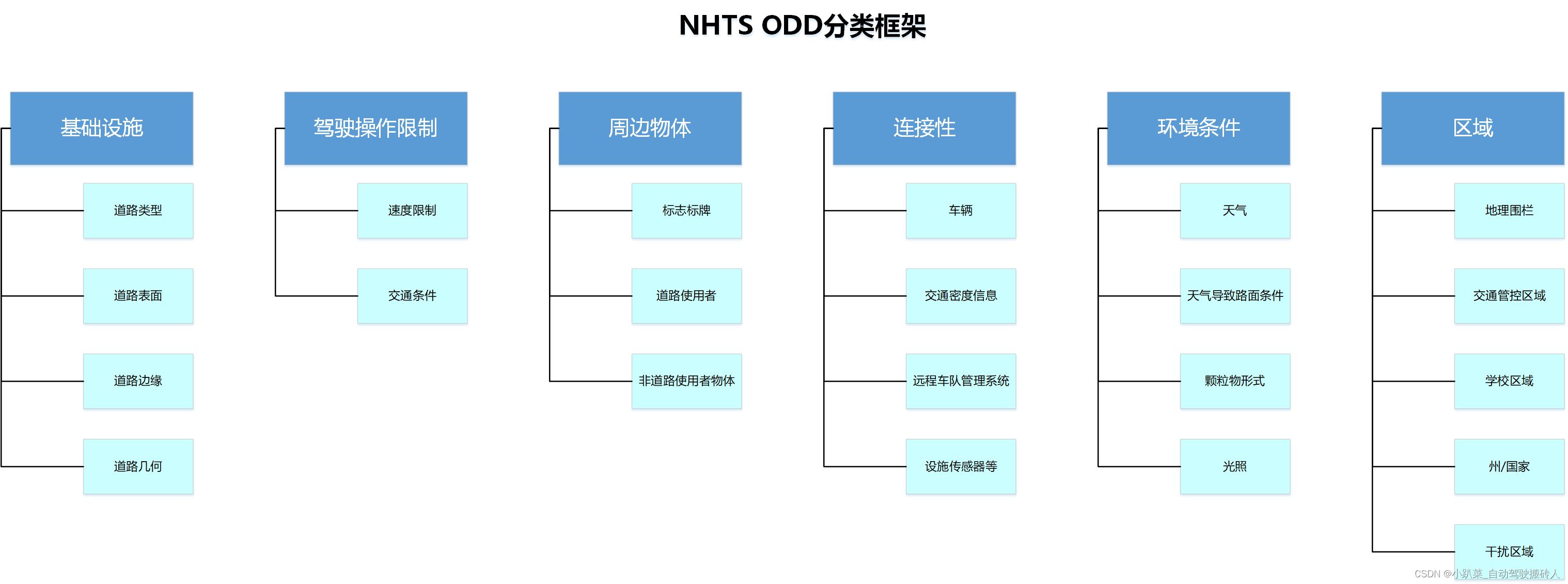
美国运输部国家公路交通安全管理局(National Highway Traffic Safety Administration,以下简称NHTSA)对ODD 的分类框架和应用方法进行了系统的介绍。NHTSA 对ODD 的定义为:自动驾驶系统可以设计运行的操作范围,包括道路类型、速度范围、光照条件、天气条件和其他相关的运行约束。NHTSA 的ODD 分类法通过结构化的方法定义自动驾驶系统的ODD,如图所示。NHTSA 将ODD 进一步分为六大构建要素:基础设施(Physical Infrastructure)、驾驶操作限制(Operational Constraints )、周边物体(Objects) 、连接性(Connectivity)、环境条件(Environmental Conditions) 和区域(Zones)。
SAE AVSC ODD构建框架
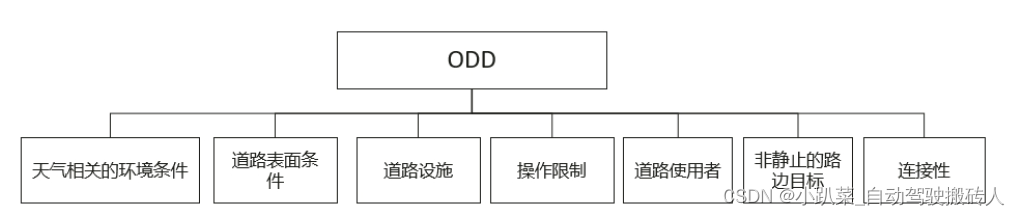
SAE 工业技术协会(SAE Industry Technologies Consortia, SAE ITC)的自动车辆安全协会(Automated Vehicle Safety Consortium, AVSC)为开发人员和企业定义自动驾驶系统的ODD。SAE AVSC 关于ODD 的定义主要参考SAE J3016, 同时该最佳实践通过概念框架和词典文档建立了ODD 通用术语及框架。ODD 主要由以下7 个维度构成: 天气相关的环境条件(Weather-Related Environmental Conditions)、道路表面条件(Road Surface Conditions)、道路设施(Roadway Infrastructure)、操作限制(Operational Constraints)、道路使用者(Road Users)、非静止的道路目标(Non-static Roadside Objects) 和连接性(Connectivity)。
PEGASUS 6层模型
PEGASUS 项目的目标是“为高度自动驾驶功能建立通用的质量标准、工具和方法、场景和情景”,如图所示。
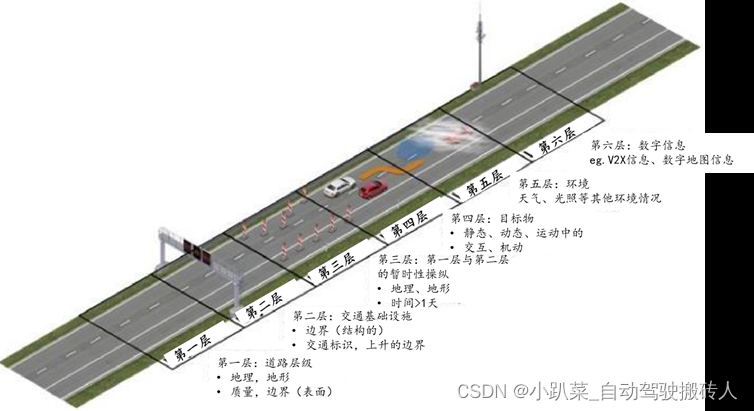
PEGASUS 研究小组使用六层模型确定场景中与ODD 有关元素,六层模型具体内容如下所示:
1. 道路:几何结构,路面质量、边界(路面);
2. 基础设施:边界(结构),标志牌、信号灯等;
3. 暂时性操纵:道路的临时性设施,如临时封路、道路施工现场等;
4. 目标物:交通参与者状态、行为等;
5. 自然环境:天气、光照等其他环境信息;
6. 数字信息:数字信息,如V2X 信息、数字地图信息等。
BSI ODD构建框架
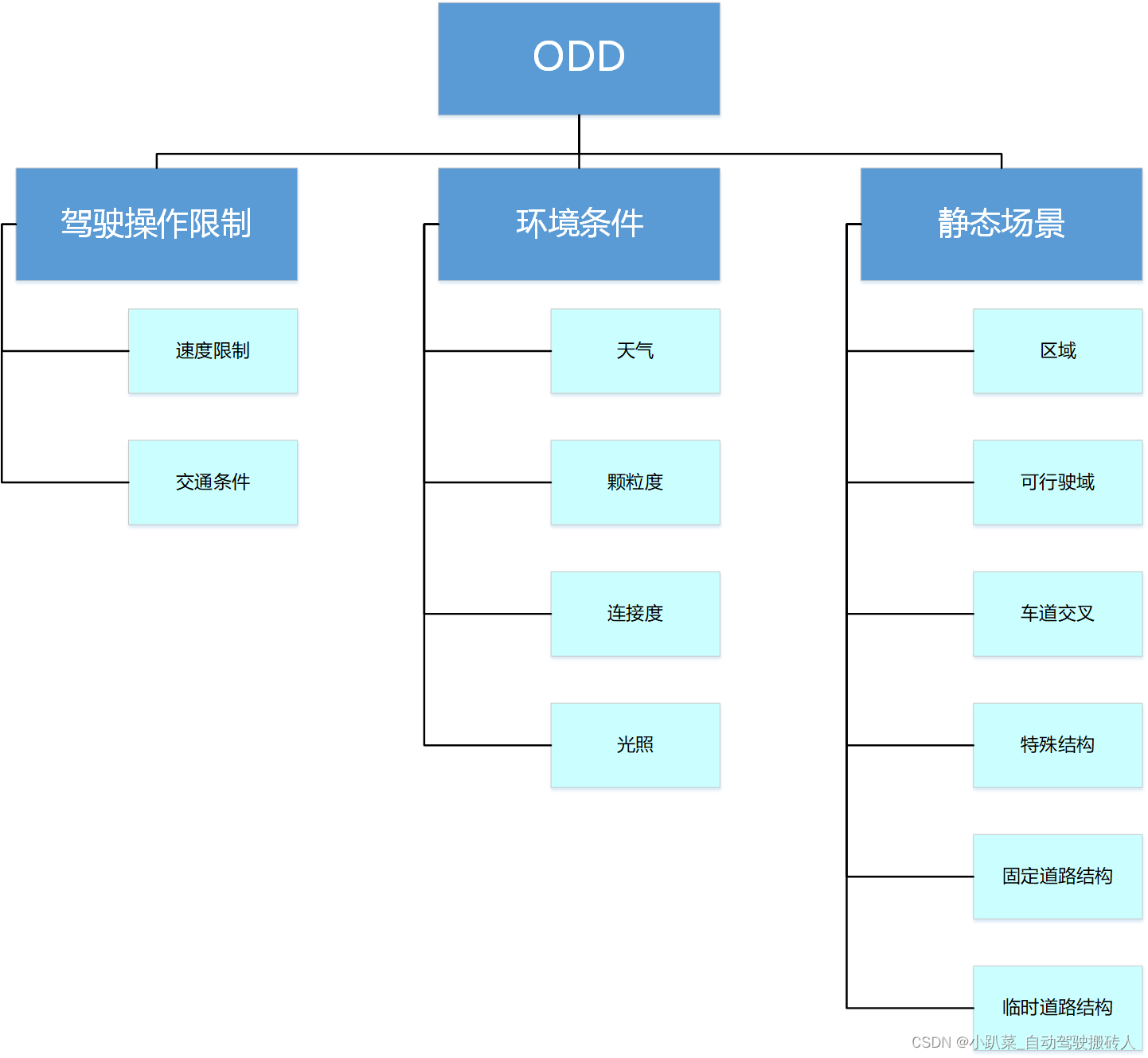
英国标准协会(British Standards Institution,BSI)在2020 年8 月发布一项新的标准规范PAS 1883:2020《自动驾驶系统(ADS)的运行设计范围(ODD)分类标准规范Operational Design Domain (ODD) taxonomy for an automated driving system (ADS) – Specification》。该标准提供了为实现自动驾驶系统的安全运行而定义的ODD 最低层分类法的要求,其中ODD 的定义主要引用SAE J3016 标准中ODD 的定义。该规范的ODD 顶层分类,ODD 主要分为“静态场景Scenery”、“环境条件Environmental Conditions”和“动态元素Dynamic Elements”。
设计运行条件的原则
ODC 的设计原则
ODC 为设计时确定的自动驾驶系统可以安全启动和运行的所有条件。不同企业的ODC 元素和设计方案并不完全一致,因此在ODC 设计时需要考虑如下原则:
1. ODC应为OEM满足最低安全要求所定义的最小元素集合。并允许用户、测试机构和监管机构在其使用中参考ODC 最小元素集合的条件要求。
2. 不同的利益相关者可能会使用不同的详细程度来制定其ODC。同时,ODC最小元素集合允许利益相关者添加新层级进行横向扩展,或将更多元素信息添加到现有层级中进行纵向扩展。
ODC 元素的制定原则
ODC 指设计时确定的自动驾驶系统可以安全启动和运行的所有条件,包括 ODD、驾乘人员状态、车辆状态以及其他必要条件。在制定ODC 元素时需要分别可考虑以下原则:
1. ODD:在制定自动驾驶系统运行的外部环境时,需要考虑自动驾驶系统能够实时获取的信息,以使自动驾驶系统能够识别ODD 范围及限制。ODD 元素可以通过自动驾驶传感器等实时感知,也可以通过V2X、高精地图等形式获得。
2. 驾乘人员状态:动态驾驶任务后援用户需要达到及时接管的条件状态,;另一方面,需要在驾乘人员足够安全这个前提条件下,才能开启和运行自动驾驶系统。OEM在对驾乘人员状态进行描述时可采取不同的策略,如L3 自动驾驶系统需要对动态驾驶任务接管用户状态进行说明;L4 自动驾驶系统在设计为搭载乘客时需要对乘客状态进行说明,在设计为非搭载乘客时则无需对驾乘人员状态进行说明,可用NA 进行表示。
3. 车辆状态:包括激活速度范围和功能状态,其中激活速度范围为自动驾驶系统能够开启的速度,通过识别车辆是否达到激活速度范围来判断车辆是否能够开启。功能状态为自动驾驶系统启动和运行时与自动驾驶功能相关的状态。车辆自检时的信息可以声觉、视觉、触觉等任意一种或以上形式向用户传达,以自动驾驶系统理解的形式向系统传达。
ODC 的使用原则
如上所述,OEM可通过定义ODC 最小元素集合来说明自动驾驶系统能够安全开启和运行的条件,为OEM、监管机构、用户和测试机构等利益相关者提供参考。OEM在设计中应选取该满足最低安全要求的ODC 最小元素集合,用户、监管机构和测试机构可参考ODC 最小元素集合的条件要求。利益相关者的使用形式和原则如下:
1. ODC 元素的相关性描述:在描述ODC 时需要考虑自动驾驶系统的启动条件和安全运行边界,这些条件和边界往往是由多个元素组合构成的。因此,ODC描述需要考虑多个元素的合理组合关系。
2. ODC 的使用形式:ODC 描述可使各利益相关者了解自动驾驶系统的启动和运行的条件。可使用“元素列表+相关性描述”的形式进行说明。
3. 用于ODC 定义的详细程度应由利益相关者自行决定。在为特定的ODC 元素选择较高的子类类别时,利益相关者应在指定其符合性时应明确表示所选较高层级的所有较低层级。
4. 自动驾驶系统或远程调控平台应监控当前的ODC,以使自动驾驶系统保持在设计和定义的ODC 之内。在即将超出ODC 边界的情况下,自动驾驶系统可能会触发最小风险操作(Minimal Risk Manoeuvre, MRM)以达到最小风险条件(Minimal Risk Condition, MRC)或将运行模式更改为降级模式,或者自动驾驶系统可以触发接管请求。
设计运行条件元素
ODC 指设计时确定的自动驾驶系统可以安全启动和运行的所有条件,如图7所示,包括ODD、驾乘人员状态、车辆状态以及其他必要条件。
ODD 元素
ODD 为自动驾驶系统运行的外部环境,在最高一级,ODD 应分为"静态实体"、"环境条件"和"动态实体"属性。
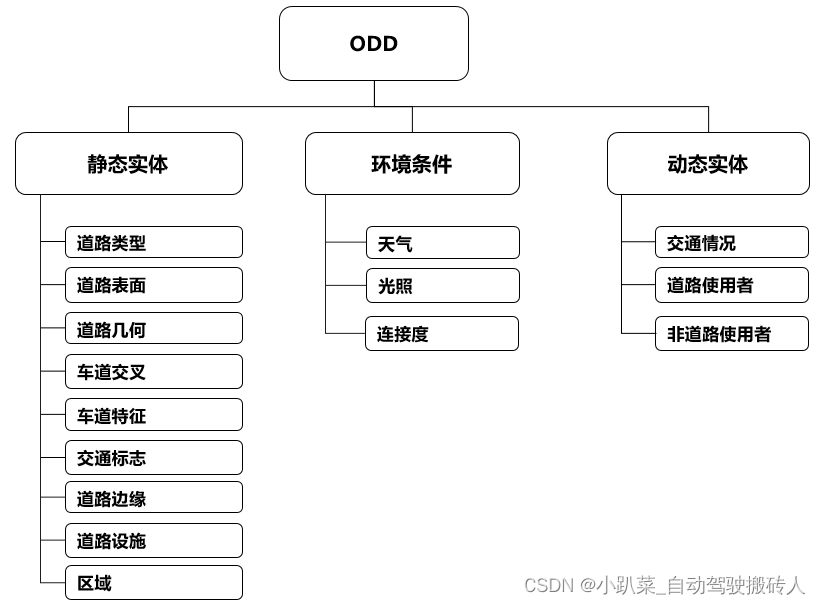
1. 静态实体 —— 应由运行环境下状态不改变的实体组成,如:道路、交通灯等;
2. 环境条件 —— 应包括天气、大气条件和信息环境;
3. 动态实体 —— 应由运行时间内状态发生变化的实体组成,如交通情况、道路使用者等。
下表为是企业满足最低安全要求需要说明的ODD 最小元素集合,监管机构、用户和测试机构对ODD 元素的使用可从中抽取。同时,ODD 元素可扩展,即ODC最小元素集合允许利益相关者添加新层级进行横向扩展,或将更多元素信息添加到现有层级中进行纵向扩展。
| ODD 最小元素集合 | ||||
|---|---|---|---|---|
| 第一层级 | 第二层级 | 第三层级 | 第四层级 | 第五层级 |
| ODD | 静态实体 | 道路类型 | 城市道路 | 快速路 |
| 主干路 | ||||
| 次干路 | ||||
| 支路 | ||||
| 公路 | 高速公路 | |||
| 一级公路 | ||||
| 二级公路 | ||||
| 三级公路 | ||||
| 四级公路 | ||||
| 厂矿道路 | 厂外道路 | |||
| 场内道路 | ||||
| 露天矿山道路 | ||||
| 林区道路 | 集材道路 | |||
| 运材道路 | ||||
| 营林道路 | ||||
| 乡村道路 | ||||
| 停车场 | 室内停车场 | |||
| 室外停车场 | ||||
| 道路表面 | 材质 | 沥青混凝土 | ||
| 水泥混凝土 | ||||
| 铺石 | ||||
| 其他如涂装材料、工业废渣、泥土 | ||||
| 道路损坏 | 开裂 | |||
| 车辙 | ||||
| 沉陷 | ||||
| 坑洼 | ||||
| 表面松散 | ||||
| 道路路面 | 干燥 | |||
| 湿滑 | ||||
| 结冰 | ||||
| 积雪 | ||||
| 积水 | ||||
| 路面有油 | ||||
| 泥泞 | ||||
| 特殊覆盖(铁板、减速带等) | ||||
| 道路几何 | 平面 | 直线 | ||
| 平曲线 | ||||
| 超高 | ||||
| 加宽 | ||||
| 纵断面 | 上坡 | |||
| 下坡 | ||||
| 水平 | ||||
| 横断面 | 分离 | |||
| 不分离 | ||||
| 人行道 | ||||
| 道路边缘屏障 | ||||
| 车道交叉 | 平面交叉 | 信号控制交叉口 | ||
| 无信号控制交叉口 | ||||
| 主路优先控制交叉口 | ||||
| 环形交叉口 | ||||
| 立体交叉 | 枢纽立交 | |||
| 一般立交 | ||||
| 分离式立交 | ||||
| 车道特征 | 车道标线 | 车道线清晰 | ||
| 车道线模糊 | ||||
| 无车道线 | ||||
| 临时车道线 | ||||
| 可变车道线 | ||||
| 车道类型 | 交通管制车道 | |||
| 混合车道 | ||||
| 专用车道 | ||||
| 应急车道 | ||||
| 人行横道 | ||||
| 自行车道 | ||||
| 公交车道 | ||||
| 车道数 | >2 车道 | |||
| 单车道 | ||||
| 2车道 | ||||
| 车道宽度 | ||||
| 车道方向 | 靠左行驶 | |||
| 靠右行驶 | ||||
| 交通标志 | 标志牌 | 固定标志 | ||
| 临时标志 | ||||
| 状态变化的 | ||||
| 状态不变的 | ||||
| 信号灯 | 固定信号灯 | |||
| 移动信号灯 | ||||
| 道路边缘 | 边界线 | 道路边界线清晰 | ||
| 无道路边界线 | ||||
| 临时道路边界线 | ||||
| 露肩 | 硬路肩(铺装、碎石) | |||
| 软路肩(草丛) | ||||
| 屏障(格栅、栏杆、路缘石、锥桶) | ||||
| 道路设施 | 特殊设施 | 桥 | ||
| 隧道 | ||||
| 收费站 | ||||
| 铁路交叉口 | ||||
| 临时设施 | 道路施工 | |||
| 交通事故 | ||||
| 固定设施 | 建筑 | |||
| 树木 | ||||
| 区域 | 地理围栏区域 | |||
| 交通管制区域 | ||||
| 学校区域 | ||||
| 环境条件 | 天气 | 风速 | [0-5]级:<10.7m/s | |
| 6级强风:10.8m/s-13.8m/s | ||||
| 7级劲风:13.9m/s-17.1m/s | ||||
| 8级大风:17.2m/s-20.7m/s | ||||
| 能见度(雾/霾) | 优: ≥10km | |||
| 良: [2, 10) km | ||||
| 一般:[1, 2) km | ||||
| 较差:[500, 1000) m | ||||
| 差: [50, 500) m | ||||
| 极差:<50m | ||||
| 雨天 | 小雨:<2.5mm/h | |||
| 中雨:2.5mm/h-7.6mm/h | ||||
| 大雨:7.6mm/h-50mm/h | ||||
| 暴雨:>50mm/h | ||||
| 雪天 | 小雪水平能见度:≥1000m | |||
| 中雪水平能见度:[500, 1000) m | ||||
| 大雪水平能见度:<500m | ||||
| 光照 | 光照度 | 白天:>=2000 lux | ||
| 照度差:[1000, 2000) lux | ||||
| 夜晚:<1000 lux | ||||
| 光照方向 | 光源在前侧 | |||
| 光源不在前侧 | ||||
| 光照角度 | 地平线及地平线上 | |||
| 地平线下 | ||||
| 人工光源 | 路灯 | |||
| 对向车灯 | ||||
| 连接性 | 通信类型 | V2V | ||
| V2I | ||||
| V2P | ||||
| V2N | ||||
| 信号强度 | 信号强 | |||
| 信号干扰(时延) | ||||
| 无信号 | ||||
| 定位类型 | GALILEO | |||
| GLONASS | ||||
| GPS | ||||
| BEIDOU | ||||
| 路侧辅助定位设施 | ||||
| 高精地图 | ||||
| 动态实体 | 交通情况 | 交通条件 | 需前方有车 | |
| 道路使用者 | 机动车 | 大型汽车 | ||
| 小型汽车 | ||||
| 专用汽车 | ||||
| 特种车 | ||||
| 三轮车 | ||||
| 二轮摩托车 | ||||
| 挂车 | ||||
| 其他机动车 | ||||
| 非机动车 | 畜力车 | |||
| 人力三轮车 | ||||
| 自行车 | ||||
| 电动自行车 | ||||
| 手推车 | ||||
| 残疾人专用车 | ||||
| 行人 | ||||
| 非道路使用者 | 动物 | |||
| 其他 | 掉落的货物等 | |||
| 动态道路垃圾 | ||||
驾乘人员状态4
驾乘人员主要分为驾驶员/动态驾驶任务后援用户和乘客。自动驾驶系统安全启动和运行时要求动态驾驶任务后援用户的状态满足及时接管的条件,同时要求驾乘人员的状态达到一定的安全条件。
| 驾乘人员状态最小元素集合 | |||
|---|---|---|---|
| 第一层级 | 第二层级 | 第三层级 | 第四层级 |
| 驾乘人员状态 | 驾驶员/ 动态驾驶任务后援用户状态 | 疲劳状态 | 非疲劳 |
| 一般疲劳 | |||
| 严重疲劳 | |||
| 注意力分散状态 | 无分散 | ||
| 瞬态分散 | |||
| 反复瞬态分散 | |||
| 长时间分散 | |||
| 位姿状态 | 驾驶姿态正常 | ||
| 驾驶姿态不正常 | |||
| 在驾驶位 | |||
| 不在驾驶位 | |||
| 极端异常情况 | 生命指征异常(体温,心跳,脉搏) | ||
| 酒驾 | |||
| 毒驾 | |||
| 路怒暴躁 | |||
| 安全带状态 | 系上 | ||
| 未系上 | |||
| 与系统匹配度 | 匹配 | ||
| 未匹配 | |||
| 乘客状态 | 位姿状态 | 无抢夺驾驶设备行为 | |
| 有抢夺驾驶设备行为 | |||
| 极端异常状态 | 生命指征异常(体温,心跳,脉搏) | ||
| 愤怒暴躁行为 | |||
| 打架行为 | |||
| 儿童约束系统状态 | 正确使用 | ||
| 未正确使用 | |||
| 安全带状态 | 系上 | ||
| 未系上 | |||
| 与系统匹配度 | 匹配 | ||
| 未匹配 | |||
车辆状态
正常运行的车辆状态是自动驾驶系统启动和运行的前提条件之一。车辆状态包括激活速度范围和功能状态,如表所示。
1. 激活速度范围 —— 主要是自动驾驶系统能够开启的速度,通过识别车辆是否达到激活速度范围来判断车辆是否能够开启。
2. 功能状态 —— 为自动驾驶系统安全启动、运行前需要进行自检的功能模块达到的状态,包括系统的软硬件功能状态,要求该自动驾驶功能状态能够满足自动驾驶系统安全启动和运行的条件要求。
| 车辆状态最小元素集合 | ||||
|---|---|---|---|---|
| 第一层级 | 第二层级 | 第三层级 | 第四层级 | |
| 车辆状态 | 激活速度范围 | |||
| 功能状态 | 感知功能 | 满足要求 | ||
| 定位功能 | ||||
| V2X功能 | ||||
| 高精地图功能 | ||||
| 决策规划功能 | ||||
| 控制功能 | 转向 | |||
| 制动 | ||||
| 动力 | ||||
| 热管理及监控 | ||||
| 胎压监测 | ||||
| 人机交互功能 | ||||
| 最小风险策略功能 | ||||
| 数据记录功能 | DSSAD | |||
| EDR | ||||
| 车身 | 传感器清洗功能 | |||
| 照明和信号灯功能 | ||||
| 车门 | 车门关闭 | |||
| 雨刮功能 | 满足要求 | |||
| 车内通讯 | ||||
| 安全功能 | 被动安全系统 | |||
| 主动安全系统 | ||||
| 信息安全状态 | 安全 | |||
| SOS 系统 | 满足要求 | |||
ODC 描述示例
ODC 描述示例一
| ODD分类 | ODD 内明确允许元素 | 明确超出ODD 元素 | ||
|---|---|---|---|---|
| ODD | 静态实体 | 道路类型 | 具有分隔栏的快速路或高速公路 | |
| 道路表面 | 道路材质:沥青、混泥土 道路路面:干燥或湿滑,特殊覆盖(减速带等) | 积水/积雪/结冰/油污路损坏 严重路面 | ||
| 道路几何 | 平面:直线、曲线、加宽、超高 纵断面:上坡、下坡、平面 横断面:分离,道路边缘屏障 | 不分离道路,人行道 | ||
| 车道特征 | 标线清晰 车道宽度:≥3.5m 车道方向:靠右行驶 | 模糊/临时/可变车道线 其他车道类型 | ||
| 交通标志 | 固定标志,所有状态 | 临时标志,信号灯 | ||
| 道路边缘 | 路肩,屏障,边界线清晰 | 临时/无边界线 | ||
| 道路设施 | 固定设施 特殊设施:收费站/桥/隧道 | 临时设施;铁路交叉口 | ||
| 区域 | 学校,交通管理区域 | |||
| 环境条件 | 风 | 不超过6 级风(<=13.8m/s) | ||
| 能见度 | ≥2km | |||
| 光照度 | >=1000 lux | |||
| 光照方向 | 所有方向 光照前侧:隧道口强光除外 | |||
| 光照角度 | 地平线及地平线以上 | |||
| 光照来源 | 太阳光 | |||
| 连接性 | V2V 通信和GPS,北斗定位,高精地图,在长隧道时需要路测辅助定位设施 | |||
| 动态实体 | 交通条件 | 无需前方有车 | ||
| 道路使用者 | 机动车(事故车除外) | 行人,非机动车 | ||
| 非道路使用者 | 动物,其他动态障碍物 | |||
| 驾乘人员状态元素要求 | ||
|---|---|---|
| 驾乘人员状态 | 驾驶员/远程驾驶员/动态驾驶任务后援用户状态 | 非疲劳 |
| 注意力无分散 | ||
| 驾驶姿态正常 | ||
| 在驾驶位 | ||
| 无极端异常状态 | ||
| 安全带系上 | ||
| 乘客状态 | 无抢夺驾驶设备行为 | |
| 无极端异常状态 | ||
| 安全带系上 | ||
| 车辆状态元素要求 | ||
| 车辆状态 | 激活速度范围(20-50)km/h | |
| 功能状态满足要求 | ||
ODC 描述示例二
Y 表示自动驾驶系统安全启动和运行时允许或者要求的元素,N 表示不允许的元素,NA 表示不涉及的元素。
| 第一层级 | 第二层级 | 第三层级 | 第四层级 | 第五层级 | 条件 |
|---|---|---|---|---|---|
| ODD | 静态实体 | 道路类型 | 城市道路 | 快速路 | Y |
| 主干路 | N | ||||
| 次干路 | |||||
| 支路 | |||||
| 公路 | 高速公路 | Y | |||
| 一级公路 | N | ||||
| 二级公路 | |||||
| 三级公路 | |||||
| 四级公路 | |||||
| 厂矿道路 | N | ||||
| 林区道路 | |||||
| 乡村道路 | |||||
| 停车场 | |||||
| 道路表面 | 材质 | 沥青混凝土 | Y | ||
| 水泥混凝土 | |||||
| 铺石 | N | ||||
| 其他如涂装、废渣、泥土 | |||||
| 道路损坏 | 开裂 | N | |||
| 车辙 | |||||
| 沉陷 | Y | ||||
| 坑洼 | |||||
| 表面松散 | N | ||||
| 道路路面 | 干燥 | Y | |||
| 湿滑 | |||||
| 结冰 | N | ||||
| 积雪 | |||||
| 积水 | |||||
| 路面有油 | |||||
| 泥泞 | |||||
| 特殊覆盖 | Y | ||||
| 道路几何 | 平面 | 直线 | Y | ||
| 平曲线 | |||||
| 超高 | |||||
| 加宽 | |||||
| 纵断面 | 上坡 | Y | |||
| 下坡 | |||||
| 水平 | |||||
| 横断面 | 分离 | Y | |||
| 不分离 | N | ||||
| 人行道 | |||||
| 道路边缘屏障 | Y | ||||
| 车道交叉 | 平面交叉 | N | |||
| 立体交叉 | |||||
| 车道特征 | 车道线 | 车道线清晰 | Y | ||
| 车道线模糊 | N | ||||
| 无车道线 | |||||
| 临时车道线 | |||||
| 可变车道线 | |||||
| 车道类型 | N | ||||
| 车道数量 | 单车道 | N | |||
| 2车道 | Y | ||||
| >2车道 | |||||
| 车道宽度 | ≥3.5m | ||||
| 车道方向 | 靠右行驶 | Y | |||
| 靠左行驶 | N | ||||
| 车道标志 | 标志标牌 | 固定标志 | Y | ||
| 临时标志 | N | ||||
| 状态变化的 | Y | ||||
| 状态不变的 | |||||
| 信号灯 | N | ||||
| 道路边缘 | 边界线 | 道路边界线清晰 | Y | ||
| 无道路边界线 | N | ||||
| 临时道路边界线 | |||||
| 路肩 | 硬路肩 | Y | |||
| 软路肩 | |||||
| 屏障 | Y | ||||
| 道路设施 | 特殊设施 | 桥 | Y | ||
| 隧道 | |||||
| 收费站 | |||||
| 铁路交叉口 | N | ||||
| 临时设施 | 道路施工 | N | |||
| 交通事故 | |||||
| 固定设施 | 建筑 | Y | |||
| 树木 | |||||
| 区域 | 地理围栏 | N | |||
| 交通管理 | |||||
| 学校区域 | |||||
| 环境条件 | 天气 | 风速 | [0-5]级:<10.7m/s | Y | |
| 6 级强风10.8m/s-13.8m/s | |||||
| 7 级劲风13.9m/s-17.1m/s | N | ||||
| 8 级大风17.2m/s-20.7m/s | |||||
| 能见度 | 优:≥10km | Y | |||
| 良:[2,10)km | |||||
| 一般:[1,2)km | N | ||||
| 较差:[500m,1000m) | |||||
| 差: [50m,500m) | |||||
| 极差:<50m | |||||
| 雨天 | 小雨:<2.5mm/h | Y,需低速行驶 | |||
| 中雨:2.5mm/h-7.6mm/h | N | ||||
| 大雨:7.6mm/h-50mm/h | |||||
| 暴雨:>50mm/h | |||||
| 雪天 | N | ||||
| 光照 | 光照度 | 优: >=2000 lux | Y | ||
| 良:[1000 lux,2000 lux) | |||||
| 一般:[500 lux,1000 lux) | N | ||||
| 差: <500 lux | |||||
| 光照方向 | 光源在前侧 | 隧道口强光除外 | |||
| 光源不在前侧 | Y | ||||
| 光照角度 | 地平线及地平线上 | Y | |||
| 地平线下 | N | ||||
| 人工光源 | 路灯 | N | |||
| 对向车灯 | |||||
| 连接性 | 通信 | V2V | Y | ||
| V2I | |||||
| V2P | N | ||||
| V2N | Y | ||||
| 信号强度 | 强 | Y | |||
| 信号干扰 | |||||
| 无信号 | N | ||||
| 定位 | GALILEO | N | |||
| GLONASS | |||||
| GPS | Y | ||||
| BEIDOU | |||||
| 高精地图 | Y | ||||
| 路侧辅助定位设施 | 长隧道需要 | ||||
| 动态实体 | 交通情况 | 交通条件 | 需前方有车 | N | |
| 道路使用者 | 机动车 | Y,事故车除外 | |||
| 非机动车 | N | ||||
| 行人 | |||||
| 非道路使用者 | 动物 | N | |||
| 其他动态物 |
| 第一层级 | 第二层级 | 第三层级 | 第四层级 | 条件 |
|---|---|---|---|---|
| 驾乘人员状态 | 驾驶员/动态驾驶任务后援用户状态 | 疲劳状态 | 非疲劳 | Y |
| 一般疲劳 | N | |||
| 严重疲劳 | ||||
| 注意力分散状态 | 无分散 | Y | ||
| 瞬态分散 | N | |||
| 反复瞬态分散 | ||||
| 长时间分散 | ||||
| 位姿状态 | 驾驶姿态正常 | Y | ||
| 驾驶姿态不正常 | N | |||
| 在驾驶位 | Y | |||
| 不在驾驶位 | N | |||
| 极端异常状态 | 生命指征异常(体温,心跳,脉搏) | Y | ||
| 酒驾 | N | |||
| 路怒暴躁 | ||||
| 毒驾 | ||||
| 安全带状态 | 系上 | Y | ||
| 未系上 | N | |||
| 与系统匹配度 | NA | |||
| 乘客状态 | 位姿状态 | 无抢夺驾驶设备行为 | Y | |
| 有抢夺驾驶设备行为 | N | |||
| 极端异常状态 | 生命指征异常(体温,心跳,脉搏) | Y | ||
| 愤怒暴躁行为 | N | |||
| 打架行为 | ||||
| 儿童约束系统状态 | NA | |||
| 安全带状态 | 系上 | Y | ||
| 未系上 | N | |||
| 与系统匹配程度 | NA |
| 第一层级 | 第二层级 | 第三层级 | 第四层级 | 条件 | |
|---|---|---|---|---|---|
| 车辆状态 | 激活速度范围 | (20-50) km/h | |||
| 功能状态 | 感知功能 | 满足要求 | Y | ||
| 定位功能 | |||||
| V2X功能 | |||||
| 高精地图 | |||||
| 决策规划能力 | |||||
| 控制功能 | 转向 | ||||
| 制动 | |||||
| 动力 | |||||
| 热管理及监控 | |||||
| 胎压监测 | |||||
| 人机交互功能 | |||||
| 最小风险策略功能 | |||||
| 数据记录功能 | DSSAD | ||||
| EDR | |||||
| 车内通讯功能 | |||||
| 车身 | 传感器清洗功能 | ||||
| 照明和信号灯功能 | |||||
| 车门 | 关闭 | ||||
| 雨刮功能 | 满足要求 | ||||
| 安全功能 | 被动安全系统 | ||||
| 主动安全系统 | |||||
| 信息安全状态 | 安全 | ||||
| SOS系统 | 满足要求 | ||||