今天学习的文章和视频链接
https://www.bilibili.com/video/BV1YT411g7br/?vd_source=8272bd48fee17396a4a1746c256ab0ae
https://www.bilibili.com/video/BV1if4y1d7ob/?vd_source=8272bd48fee17396a4a1746c256ab0ae
24两两交换链表中的节点
给你一个链表,两两交换其中相邻的节点,并返回交换后链表的头节点。你必须在不修改节点内部的值的情况下完成本题(即,只能进行节点交换)。
输入:head = [1,2,3,4]
输出:[2,1,4,3]
示例 2:
输入:head = []
输出:[]
示例 3:
输入:head = [1]
输出:[1]
提示:
链表中节点的数目在范围 [0, 100] 内
0 <= Node.val <= 100
题目分析
交换相邻两个元素了,此时一定要画图,不画图,操作多个指针很容易乱,而且要操作的先后顺序,画图步骤建议看文章开头的视频链接
我遇到的问题
少写了一句dummyHead->next = head,导致完全没有传参。
我的acm模式代码
#include
#include
struct ListNode {
int val;
ListNode* next = nullptr;
ListNode(int x):val(x), next(nullptr) {}
ListNode(int x, ListNode* next):val(x), next(next) {}
};
class Solution {
public:
ListNode* swapPairs(ListNode* head) {
ListNode* dummyHead = new ListNode(0);
dummyHead->next = head;
ListNode* cur = dummyHead;
while (cur->next != nullptr && cur->next->next != nullptr) {
ListNode* tmp = cur->next;
ListNode* tmp1 = cur->next->next->next;
cur->next = cur->next->next;cur->next->next = tmp;tmp->next = tmp1;//更新curcur = cur->next->next;}return dummyHead->next;
}// 辅助函数,用于创建一个链表
ListNode* createList(const std::vector<int>& values) {ListNode* dummyHead = new ListNode(0);ListNode* cur = dummyHead;for (int value : values) {cur->next = new ListNode(value);cur = cur->next;}ListNode* head = dummyHead->next;delete dummyHead;return head;
}// 辅助函数,用于打印链表
void printList(ListNode* head) {ListNode* cur = head;while (cur != nullptr) {std::cout << cur->val << " ";cur = cur->next;}std::cout << std::endl;
}
};
int main() {
Solution sol;
// 创建链表
std::vector values = {1, 2, 3, 4, 5};
ListNode* head = sol.createList(values);
// 打印原始链表
std::cout << "Original List: ";
sol.printList(head);// 反转链表ListNode* swapNode = sol.swapPairs(head);// 打印反转后的链表
std::cout << "swap List: ";
sol.printList(swapNode);return 0;
}
19 删除链表的倒数第N个节点
题目描述
输入:head = [1,2,3,4,5], n = 2
输出:[1,2,3,5]
示例 2:
输入:head = [1], n = 1
输出:[]
示例 3:
输入:head = [1,2], n = 1
输出:[1]
提示:
链表中结点的数目为 sz
1 <= sz <= 30
0 <= Node.val <= 100
1 <= n <= sz
进阶:你能尝试使用一趟扫描实现吗?
我的想法
首先反转链表,在通过n来遍历找到要删除节点的前一个节点进行删除
整体思路
利用快慢指针(妙),快指针比慢指针多走n+1步,让cur指针停在要删除节点的前一个节点
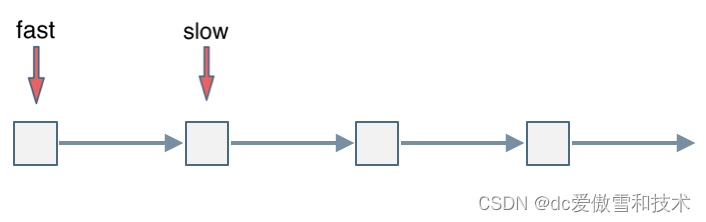
如果要删除倒数第n个节点,让fast移动n步,然后让fast和slow同时移动,直到fast指向链表末尾。删掉slow所指向的节点就可以了。
题目分析
定义fast指针和slow指针,初始值为虚拟头结点
ast首先走n + 1步 ,为什么是n+1呢,因为只有这样同时移动的时候slow才能指向删除节点的上一个节点(方便做删除操作)
fast首先走n + 1步 ,为什么是n+1呢,因为只有这样同时移动的时候slow才能指向删除节点的上一个节点(方便做删除操作),如图:
fast和slow同时移动,直到fast指向末尾
删除slow指向的下一个节点
acm模式完整代码
#include <iostream>
#include <vector>struct ListNode {int val;ListNode* next;ListNode(int x):val(x), next(nullptr) {}ListNode(int x, ListNode* next):val(x), next(next) {}
};class Solution {
public:ListNode* removeNthFromEnd(ListNode* head, int n) {ListNode* dummyHead = new ListNode(0);dummyHead->next = head;ListNode* fast = dummyHead;ListNode* slow = dummyHead;// n++;while (n-- && fast != nullptr) {fast = fast->next;}fast = fast->next; // fast再提前走一步,因为需要让slow指向删除节点的上一个节点while (fast != nullptr) {fast = fast->next;slow = slow->next;}//删除节点ListNode* tmp = slow->next;slow->next = slow->next->next;delete tmp;return dummyHead->next;}// 辅助函数,用于创建一个链表ListNode* createList(const std::vector<int>& values) {ListNode* dummyHead = new ListNode(0);ListNode* cur = dummyHead;for (int value : values) {cur->next = new ListNode(value);cur = cur->next;}ListNode* head = dummyHead->next;delete dummyHead;return head;}// 辅助函数,用于打印链表void printList(ListNode* head) {ListNode* cur = head;while (cur != nullptr) {std::cout << cur->val << " ";cur = cur->next;}std::cout << std::endl;}
};int main() {Solution sol;// 创建链表std::vector<int> values = {1, 2, 3, 4, 5};ListNode* head = sol.createList(values);// 打印原始链表std::cout << "Original List: ";sol.printList(head);// 反转链表ListNode* swapNode = sol.removeNthFromEnd(head, 3);// 打印反转后的链表std::cout << "swap List: ";sol.printList(swapNode);return 0;
}
面试题 02.07. 链表相交
给你两个单链表的头节点 headA 和 headB ,请你找出并返回两个单链表相交的起始节点。如果两个链表没有交点,返回 null 。
图示两个链表在节点 c1 开始相交:

题目数据 保证 整个链式结构中不存在环。
注意,函数返回结果后,链表必须 保持其原始结构 。
示例 1:
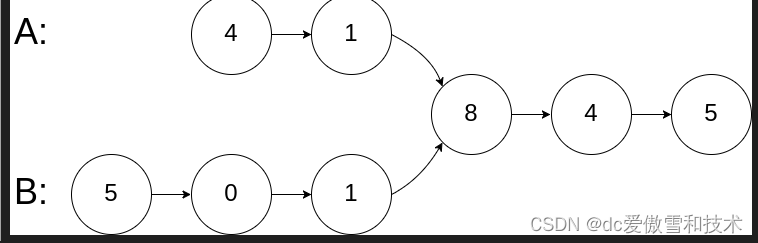
输入:intersectVal = 8, listA = [4,1,8,4,5], listB = [5,0,1,8,4,5], skipA = 2, skipB = 3
输出:Intersected at ‘8’
解释:相交节点的值为 8 (注意,如果两个链表相交则不能为 0)。
从各自的表头开始算起,链表 A 为 [4,1,8,4,5],链表 B 为 [5,0,1,8,4,5]。
在 A 中,相交节点前有 2 个节点;在 B 中,相交节点前有 3 个节点。
提示:
listA 中节点数目为 m
listB 中节点数目为 n
0 <= m, n <= 3 * 104
1 <= Node.val <= 105
0 <= skipA <= m
0 <= skipB <= n
如果 listA 和 listB 没有交点,intersectVal 为 0
如果 listA 和 listB 有交点,intersectVal == listA[skipA + 1] == listB[skipB + 1]
进阶:你能否设计一个时间复杂度 O(n) 、仅用 O(1) 内存的解决方案?
题目分析
简单来说,就是求两个链表交点节点的指针。 这里同学们要注意,交点不是数值相等,而是指针相等。
为了方便举例,假设节点元素数值相等,则节点指针相等。
看如下两个链表,目前curA指向链表A的头结点,curB指向链表B的头结点:
(我不理解),今天跳过这道题
142 环形链表
题目分析
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用整数 pos 来表示链表尾连接到链表中的位置(索引从 0 开始)。如果 pos 是 -1,则在该链表中没有环。注意:pos 不作为参数进行传递,仅仅是为了标识链表的实际情况。
不允许修改 链表。

提示:
链表中节点的数目范围在范围 [0, 104] 内
-105 <= Node.val <= 105
pos 的值为 -1 或者链表中的一个有效索引
进阶:你是否可以使用 O(1) 空间解决此题?
整体思路
用快慢指针判断是否有环,快指针每次走两个节点,慢指针每次走一个节点,快指针是一个一个节点靠近慢指针,一定会在环里面相遇
判断链表是否有环
可以使用快慢指针法,分别定义 fast 和 slow 指针,从头结点出发,fast指针每次移动两个节点,slow指针每次移动一个节点,如果 fast 和 slow指针在途中相遇 ,说明这个链表有环。
为什么fast 走两个节点,slow走一个节点,有环的话,一定会在环内相遇呢,而不是永远的错开呢
首先第一点:fast指针一定先进入环中,如果fast指针和slow指针相遇的话,一定是在环中相遇,这是毋庸置疑的。
那么来看一下,为什么fast指针和slow指针一定会相遇呢?
可以画一个环,然后让 fast指针在任意一个节点开始追赶slow指针。
会发现最终都是这种情况, 如下图:
fast和slow各自再走一步, fast和slow就相遇了
这是因为fast是走两步,slow是走一步,其实相对于slow来说,fast是一个节点一个节点的靠近slow的,所以fast一定可以和slow重合。
如果有环,如何找到这个环的入口
此时已经可以判断链表是否有环了,那么接下来要找这个环的入口了。
假设从头结点到环形入口节点 的节点数为x。 环形入口节点到 fast指针与slow指针相遇节点 节点数为y。 从相遇节点 再到环形入口节点节点数为 z。
那么相遇时: slow指针走过的节点数为: x + y, fast指针走过的节点数:x + y + n (y + z),n为fast指针在环内走了n圈才遇到slow指针, (y+z)为 一圈内节点的个数A。
因为fast指针是一步走两个节点,slow指针一步走一个节点, 所以 fast指针走过的节点数 = slow指针走过的节点数 * 2:
(x + y) * 2 = x + y + n (y + z)
两边消掉一个(x+y): x + y = n (y + z)
因为要找环形的入口,那么要求的是x,因为x表示 头结点到 环形入口节点的的距离。
所以要求x ,将x单独放在左面:x = n (y + z) - y ,
再从n(y+z)中提出一个 (y+z)来,整理公式之后为如下公式:x = (n - 1) (y + z) + z 注意这里n一定是大于等于1的,因为 fast指针至少要多走一圈才能相遇slow指针。
这个公式说明什么呢?
先拿n为1的情况来举例,意味着fast指针在环形里转了一圈之后,就遇到了 slow指针了。
当 n为1的时候,公式就化解为 x = z,
这就意味着,从头结点出发一个指针,从相遇节点 也出发一个指针,这两个指针每次只走一个节点, 那么当这两个指针相遇的时候就是 环形入口的节点。
那么 n如果大于1是什么情况呢,就是fast指针在环形转n圈之后才遇到 slow指针。
其实这种情况和n为1的时候 效果是一样的,一样可以通过这个方法找到 环形的入口节点,只不过,index1 指针在环里 多转了(n-1)圈,然后再遇到index2,相遇点依然是环形的入口节点。
代码如下:
class Solution {
public:ListNode* detectCycle(ListNode* head) {ListNode* fast = head;ListNode* slow = head;while (fast != nullptr && fast->next != nullptr) {slow = slow->next;fast = fast->next->next;if (slow == fast) {ListNode* index1 = fast;ListNode* index2 = slow;while (index1 != index2) {index1 = index1->next;index2 = index2->next;}return index2;}}return nullptr;}};
谁能帮我看看这段代码为什么不能运行通过呢。
为了确定这段代码的时间复杂度,我们需要分析两个主要部分:寻找循环(如果存在)和确定循环的起始点。
寻找循环:这部分使用了快慢指针的方法。慢指针每次移动一步,快指针每次移动两步。如果链表中没有循环,快指针将到达链表的末尾,操作将在O(n)时间内完成,其中n是链表中的节点数。如果链表中有循环,快慢指针最终会在循环中的某个点相遇。这个相遇点最坏情况下会在O(n)时间内发生。确定循环的起始点:一旦快慢指针在循环中相遇,代码中的第二个循环会开始寻找循环的起始点。在最坏的情况下,这个循环会遍历整个链表一次,再次带来O(n)的时间复杂度。
综合以上两部分,整个函数的时间复杂度是O(n)。