⛳️ 粉丝福利活动
-
✅参与方式:通过连接报名观看课程,即可免费获取精美周边
-
⛳️活动链接:《自动驾驶新人之旅》
-
📆 活动时间长期有效 | 课程姓名填写
鸽芷咕学号1111
完成后加博主微信填写问卷领取礼品,也可根据《活动步骤》 完成领取
🔥 注:可以拉取进度条观看,超过%50即可领取百度周边

⛳️ 文章末尾扫码加入粉丝群,不定期发放粉丝福利,各种专业书籍免费赠送!
文章目录
- ⛳️ 粉丝福利活动
- 引言
- 一、Camera代码结构概述
- 1.1 Camera 障碍物检测流水线:
- 1.2 Camera感知配置文件梳理
- 二、数据输入
- 三、预处理
- 四、目标检测
- 五、车道线识别
- 结语
引言
在自动驾驶系统中,摄像头是一种重要的感知传感器,负责捕捉周围环境的图像信息。Camera感知模块是自动驾驶系统中的核心组成部分之一,它通过处理摄像头采集的图像数据来实现目标检测、车道线识别等功能。
一、Camera代码结构概述
Camera感知模块的代码结构通常包括以下几个重要部分:
- 数据输入: 从摄像头获取图像数据的接口和处理逻辑。
- 预处理: 对摄像头图像进行预处理,如图像去噪、颜色空间转换等。
- 目标检测: 使用目标检测算法识别图像中的目标,如车辆、行人等。
- 车道线识别: 通过图像处理技术识别和跟踪车道线。
- 结果输出: 将目标检测和车道线识别的结果输出供其他模块使用。
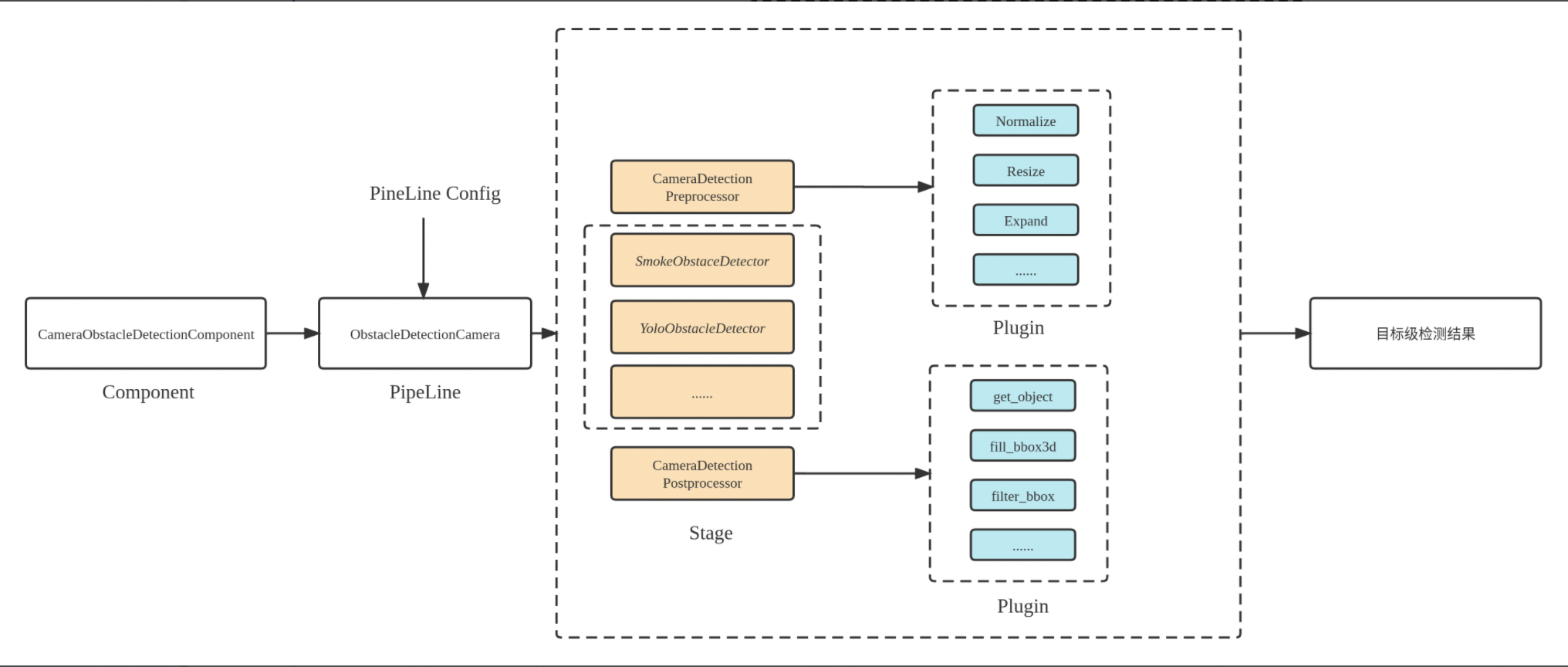
1.1 Camera 障碍物检测流水线:
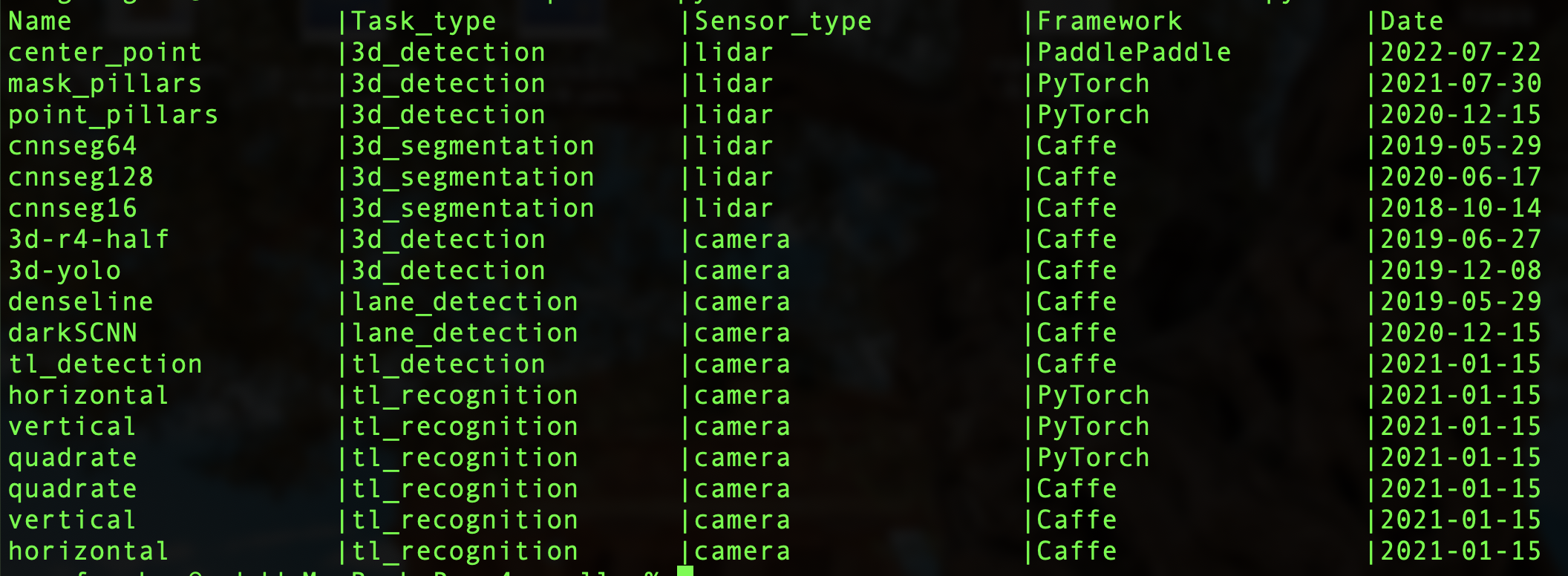
1.2 Camera感知配置文件梳理
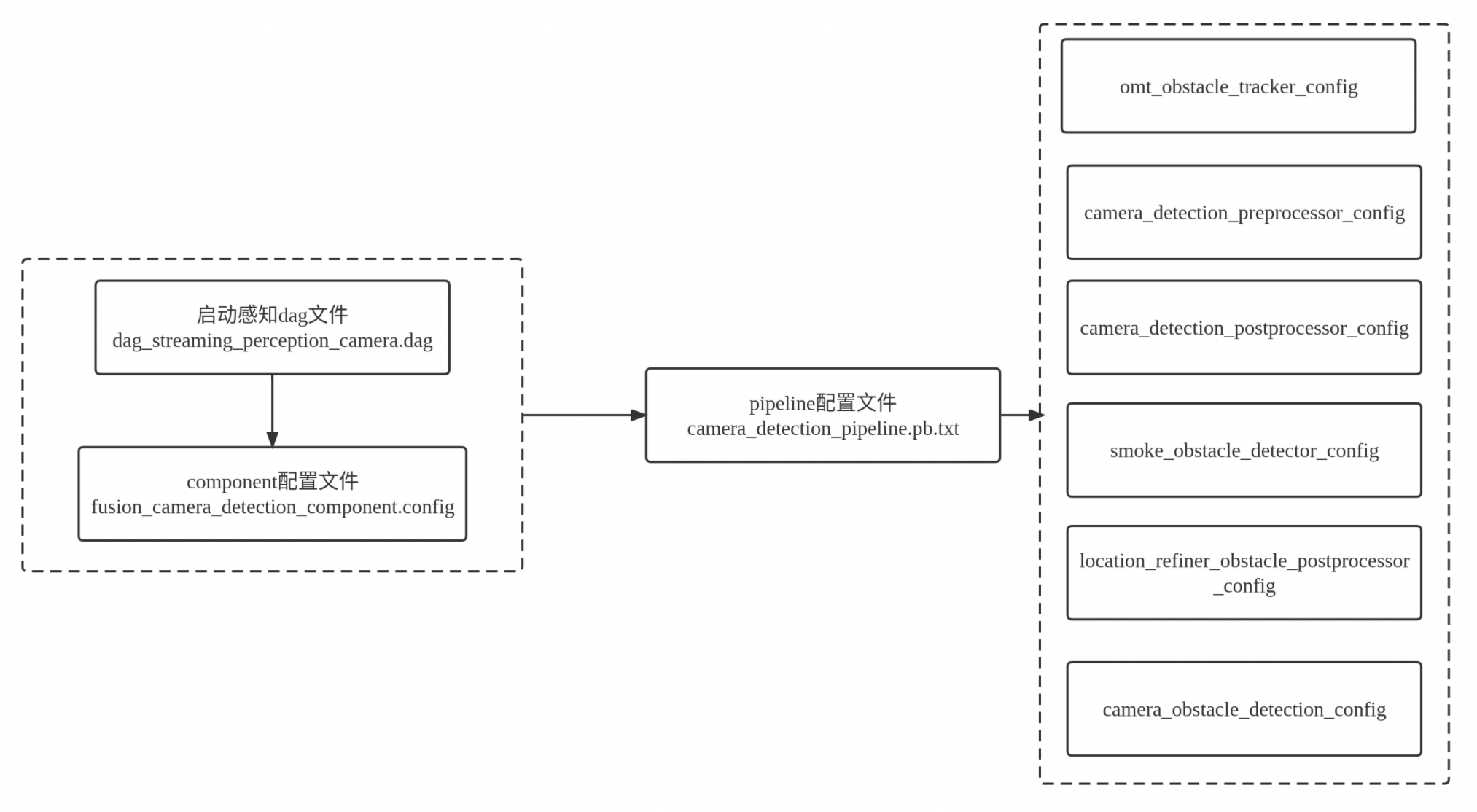
Camera 感知的入口为 dag_streaming_perception_camera.dag,Camera 感知模块 Component 配置在 dag 文件中被指定
fusion_camera_detection_component.config,用来对CameraObstacleDetectionComponent 初始化。camera_detection_pipeline.pb.txt 为ObstacleDetectionCamera 这条 pipeline 的配置文件,该配置文件包含了该 pipeline 对应的所有 stage、plugin 的配置项
module_config {
module_library : "/apollo/bazel-bin/modules/perception/onboard/component/libperception_component_camera.so"
components {class_name : "CameraObstacleDetectionComponent"config {name: "CameraObstacleDetectionComponent"config_file_path: "/apollo/modules/perception/production/conf/perception/camera/fusion_camera_detection_component.config"flag_file_path: "/apollo/modules/perception/production/conf/perception/perception_common.flag"}
}
}
二、数据输入
// 示例代码
#include <camera/camera_driver.h>int main() {// 初始化摄像头驱动CameraDriver camera;camera.Init();// 获取摄像头图像数据ImageData image_data = camera.CaptureImage();// 进行后续处理...return 0;
}
在这个示例中,摄像头驱动被初始化,并通过CaptureImage函数获取摄像头采集的图像数据,该数据将用于后续的处理。
三、预处理
// 示例代码
#include <camera/image_preprocessor.h>int main() {// 初始化图像预处理模块ImagePreprocessor preprocessor;preprocessor.Init();// 对图像进行预处理ImageData processed_image = preprocessor.ProcessImage(image_data);// 进行后续处理...return 0;
}
在预处理阶段,图像数据通过图像预处理模块进行处理,包括去噪、颜色空间转换等操作,以提高后续目标检测和车道线识别的准确性。
四、目标检测
// 示例代码
#include <camera/object_detection.h>int main() {// 初始化目标检测模块ObjectDetection object_detection;object_detection.Init();// 进行目标检测std::vector<Object> detected_objects = object_detection.DetectObjects(processed_image);// 处理检测结果...return 0;
}
目标检测模块使用先进的算法对经过预处理的图像进行目标检测,返回检测到的目标对象的信息,如类型、位置等。
五、车道线识别
// 示例代码
#include <camera/lane_detection.h>int main() {// 初始化车道线识别模块LaneDetection lane_detection;lane_detection.Init();// 进行车道线识别LaneInfo lane_info = lane_detection.DetectLanes(processed_image);// 处理识别结果...return 0;
}
车道线识别模块通过图像处理技术对图像中的车道线进行识别和跟踪,返回车道线的信息,如位置、曲率等。
结语
Camera感知模块的高效工作对于实现精准的目标检测和车道线识别至关重要,为自动驾驶系统的感知能力提供了强大支持。希望本文能够帮助开发者更好地理解和应用Camera感知模块,推动自动驾驶技术的不断进步。