1. Transfer Learning
Transfer learning 是机器学习的一个分支, 而 Domain adpatation 是 transfer learning 的一个分支.
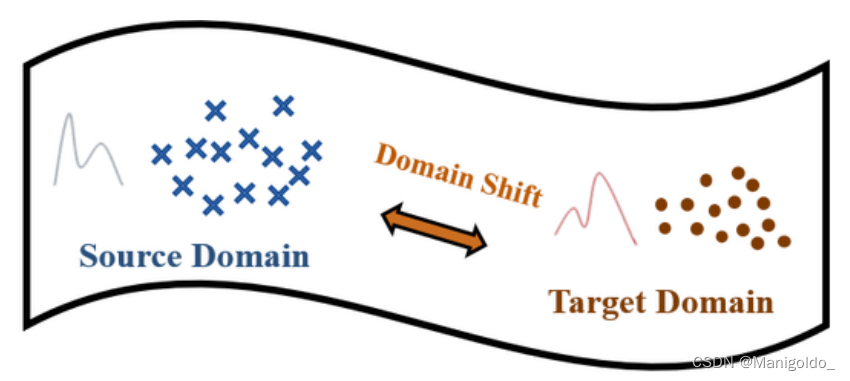
在 transfer learning 中有两个概念: source domain (源域) 和 target domain (目标域).
源域中往往有丰富的信息, 比如有大量的数据点和其真实的标签; 但目标域中相反, 数据不带有标签或少量数据带有标签, 所以无法用传统的方式学习. Transfer learning 的目标是: 利用两个域的信息, 学习一个能在 target domain 上准确率高的分类器.
根据两个域的背景设定不同, transfer learning 有以下分类, 本文关注于 domain adaptation.

上图来自于综述论文 A survey on domain adaptation theory: learning bounds and theoretical guarantees.
- 传统的学习设定: 两个域的输入分布相同, 且任务相同. 这时的 source domain 就是训练集, target domain 就是测试集.
- Inductive transfer learning: 两个域的输入分布相同, 但任务不同.
- Transductive transfer learning/ Domain adaptation: 两个域的输入分布不同, 但任务相同.
- Unsupervised transfer learning: 两个域的输入分布不同, 且任务不同.
所以在 Domain adaptation 任务中, source domain 与 target domain 是不同的, 这种差别称为: distributional change, distributional shift 或 domain shift. 下面介绍下 domain shift.
2. Domain Shift
Domain shift 主要分为以下三种: prior shift, covariate shift 和 concept shift.
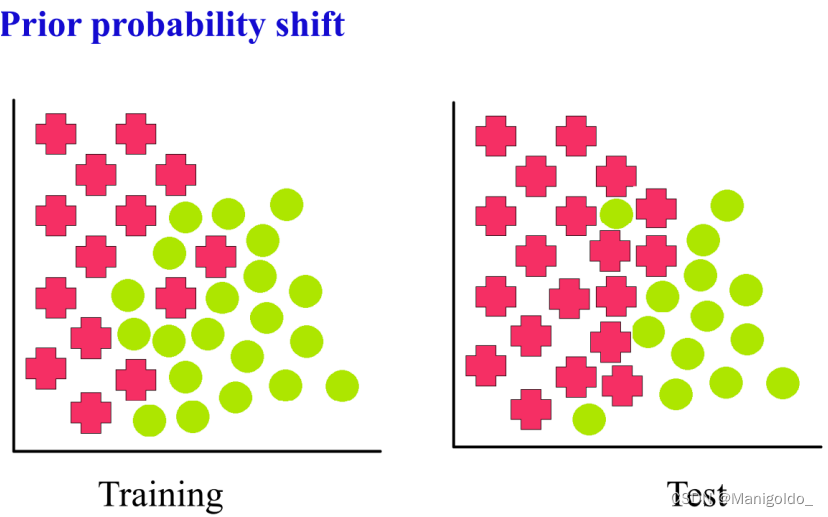
2.1 Prior shift
用于 Y → X Y\rightarrow X Y→X problems, 设定为:
- posterior distributions are equivalent: p s ( x ∣ y ) = p t ( x ∣ y ) p_s(x|y)=p_t(x|y) ps(x∣y)=pt(x∣y)
- prior distributions of classes are different: p s ( y ) ≠ p t ( y ) p_s(y)\neq p_t(y) ps(y)=pt(y)
2.2 Covariate shift
用于 X → Y X\rightarrow Y X→Y problems, 设定为:
- marginal distributions are different: p s ( x ) ≠ p t ( x ) p_s(x)\neq p_t(x) ps(x)=pt(x)
- conditional distributions are equivalent: p s ( y ∣ x ) = p t ( y ∣ x ) p_s(y|x)=p_t(y|x) ps(y∣x)=pt(y∣x)
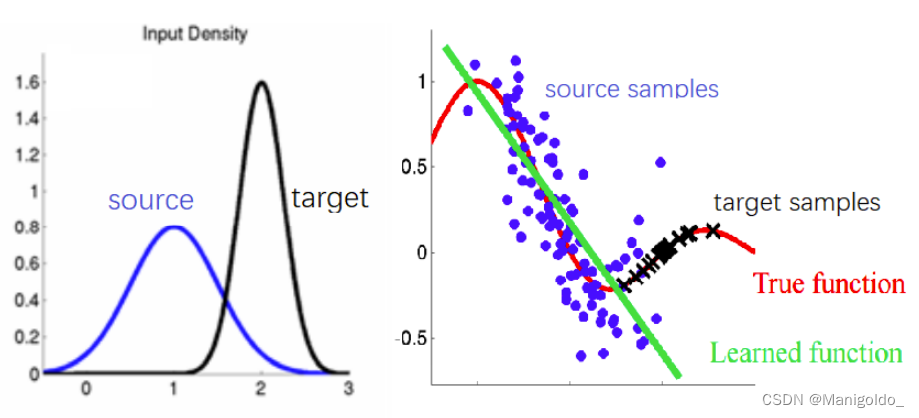
Covariate shift 是最常见的设定, 大多domain adaptation 的论文都是以这个为背景. 上图是一个例子, source 与 target 的分布不同(左图), 但它们的样本点都坐落在 true function 的周围(右图), 如果只用 source samples 做训练可能会得到绿色的函数, 无法用在 target domain上.
2.3 Concept shift
又叫 Data drift, 用于 X → Y X\rightarrow Y X→Y 和 Y → X Y\rightarrow X Y→X problems.
- In X → Y X\rightarrow Y X→Y problems: p s ( x ) = p t ( x ) p_s(x)=p_t(x) ps(x)=pt(x) and p s ( y ∣ x ) ≠ p t ( y ∣ x ) p_s(y|x)\neq p_t(y|x) ps(y∣x)=pt(y∣x)
- In Y → X Y\rightarrow X Y→X problems: p s ( y ) = p t ( y ) p_s(y)=p_t(y) ps(y)=pt(y) and p s ( x ∣ y ) ≠ p t ( x ∣ y ) p_s(x|y)\neq p_t(x|y) ps(x∣y)=pt(x∣y)
3. Closed-set Unsupervised Domain Adaptation
Domain Adaptation 其实也有很多类型, 比如 closed-set 或 open-set, unsupervised 或 supervised. 研究最多的是 closed-set unsupervised domain adaptation. 每个单词的意思是:
- Domain Adaptation(DA): 正如前面讲的, source 与 target domain 的分布不同, 但任务相同
- Unsupervised DA: target domain 中的数据不带有标签
- Closed-set DA (traditional DA): source 与 target domain 的输入和输出空间相同,但联合概率分布不同 ⇒ X S = X T , Y S = Y T , p s ( x , y ) ≠ p t ( x , y ) \Rightarrow \mathcal{X_S}=\mathcal{X_T}, \mathcal{Y_S}=\mathcal{Y_T}, p_s(x,y)\neq p_t(x,y) ⇒XS=XT,YS=YT,ps(x,y)=pt(x,y).
4. 经典方法
DA 的目标是学习一个在 target domain 上效果好的分类器, 这等价于最小化在 target domain 上的expected risk, 用数学表示:
R T ( h ) = E ( x , y ) ∼ p t ( x , y ) [ ℓ ( h ( x ) , y ) ] = ∑ y ∈ Y ∫ X ℓ ( h ( x ) , y ) p t ( x , y ) p s ( x , y ) p s ( x , y ) d x = ∑ y ∈ Y ∫ X ℓ ( h ( x ) , y ) p s ( x , y ) p t ( x , y ) p s ( x , y ) d x = E ( x , y ) ∼ p s ( x , y ) [ p t ( x , y ) p s ( x , y ) ℓ ( h ( x ) , y ) ] R_T(h)=\mathbb{E}_{(x,y)\sim p_t(x,y)} [\ell(h(x),y)]\\ =\sum_{y\in Y} \int_{X} \ell(h(x),y)p_t(x,y)\frac{p_s(x,y)}{p_s(x,y)} dx\\ =\sum_{y\in Y} \int_{X} \ell(h(x),y)p_s(x,y)\frac{p_t(x,y)}{p_s(x,y)} dx\\ =\mathbb{E}_{(x,y)\sim p_s(x,y)} [\frac{p_t(x,y)}{p_s(x,y)}\ell(h(x),y)] RT(h)=E(x,y)∼pt(x,y)[ℓ(h(x),y)]=y∈Y∑∫Xℓ(h(x),y)pt(x,y)ps(x,y)ps(x,y)dx=y∈Y∑∫Xℓ(h(x),y)ps(x,y)ps(x,y)pt(x,y)dx=E(x,y)∼ps(x,y)[ps(x,y)pt(x,y)ℓ(h(x),y)]
这就可以与 source 建立联系, 且当设定为 covariate shift 时 [ p s ( x ) ≠ p t ( x ) , p s ( y ∣ x ) = p t ( y ∣ x ) p_s(x)\neq p_t(x), p_s(y|x)=p_t(y|x) ps(x)=pt(x),ps(y∣x)=pt(y∣x)]:
R T ( h ) = E ( x , y ) ∼ p s ( x , y ) [ p t ( x ) p t ( y ∣ x ) p s ( x ) p s ( y ∣ x ) ℓ ( h ( x ) , y ) ] = E ( x , y ) ∼ p s ( x , y ) [ p t ( x ) p s ( x ) ℓ ( h ( x ) , y ) ] R_T(h)=\mathbb{E}_{(x,y)\sim p_s(x,y)} [\frac{p_t(x)p_t(y|x)}{p_s(x)p_s(y|x)}\ell(h(x),y)]\\ =\mathbb{E}_{(x,y)\sim p_s(x,y)} [\frac{p_t(x)}{p_s(x)}\ell(h(x),y)] RT(h)=E(x,y)∼ps(x,y)[ps(x)ps(y∣x)pt(x)pt(y∣x)ℓ(h(x),y)]=E(x,y)∼ps(x,y)[ps(x)pt(x)ℓ(h(x),y)]
当设定为 prior shift 时 [ p s ( x ∣ y ) = p t ( x ∣ y ) , p s ( y ) ≠ p t ( y ) p_s(x|y)=p_t(x|y), p_s(y)\neq p_t(y) ps(x∣y)=pt(x∣y),ps(y)=pt(y)]:
R T ( h ) = E ( x , y ) ∼ p s ( x , y ) [ p t ( y ) p t ( x ∣ y ) p s ( y ) p s ( x ∣ y ) ℓ ( h ( x ) , y ) ] = E ( x , y ) ∼ p s ( x , y ) [ p t ( y ) p s ( y ) ℓ ( h ( x ) , y ) ] R_T(h)=\mathbb{E}_{(x,y)\sim p_s(x,y)} [\frac{p_t(y)p_t(x|y)}{p_s(y)p_s(x|y)}\ell(h(x),y)]\\ =\mathbb{E}_{(x,y)\sim p_s(x,y)} [\frac{p_t(y)}{p_s(y)}\ell(h(x),y)]\\ RT(h)=E(x,y)∼ps(x,y)[ps(y)ps(x∣y)pt(y)pt(x∣y)ℓ(h(x),y)]=E(x,y)∼ps(x,y)[ps(y)pt(y)ℓ(h(x),y)]
其中 w ( x ) = p t ( x ) p s ( x ) w(x)=\frac{p_t(x)}{p_s(x)} w(x)=ps(x)pt(x) 被称为 importance weight 或 re-weighting factor, w ( y ) = p t ( y ) p s ( y ) w(y)=\frac{p_t(y)}{p_s(y)} w(y)=ps(y)pt(y) 被称为 class weight.
所以很多早期经典论文都是从估计 w ( x ) w(x) w(x)角度出发, 主要思路是寻找一个合适的 w ( x ) w(x) w(x) 使得 re-weighted source dist. 与 target dist. 之间的差距最小化, 这种方法称为 Density Ratio Estimation (DRE), 可以读以下论文:
- KMM - NeurIPS 2006
- KLIEP - NeurIPS 2007
还有很多方法从 source 和 target 的子空间进行研究 (GFK, SA, SDA), 随着神经网络的流行, 又有一些文章用 DNNs 学习 source 和 target 之间的关系 (DDC, DAN, DANN, DeepCoral, DRCN, CoGAN), 多为基于GAN的模型.
5. 常用数据集
- Office-Home: https://arxiv.org/abs/1706.07522
- VLSC: https://openaccess.thecvf.com/content_iccv_2013/papers/Fang_Unbiased_Metric_Learning_2013_ICCV_paper.pdf
- DomainNet: https://ai.bu.edu/M3SDA/
- RMNIST: https://arxiv.org/abs/1508.07680
- CMNIST: https://arxiv.org/abs/1907.02893
- PACS: https://arxiv.org/abs/1710.03077
- Terra Incognita: https://arxiv.org/abs/1807.04975