看过很多博主通过 Object Detection 实现了一些皮卡丘捕捉,二维码检测等诸多特定项的目标检测。而我跟着他们的案例来运行的时候,不是 Tensorflow 版本冲突,就是缺少什么包,还有是运行官方 object_detection_tutorial 不展示图片等等问题。
在看过一个国外博主例子,我也通过 Tensorflow-GPU1.10.0 运行了官方例子,既然要使用 GPU 则需要把 CUDA 先配置好,上一篇文章有特别详细介绍到。而这里就捋一下在运行过程遇到的种种问题。
环境
- windows10 的 64 位电脑
2. 显卡 GeForce GTX 750 Ti
-
Python 3.6.13
-
Tensorflow-GPU 1.10.0
-
Cuda 9.0.176
-
Cudnn7.0.5
环境搭建
1. 安装 Python 3.6.13 环境
由于之前我有其他项目用了高版本的 Py,这里我就用了 Anconda3 的 conda 创建一个虚拟环境,这里的 conda 的 bin 目录需要加到环境变量中。
1.1. 查看环境列表
输入 conda env list,就可以列出以往所有的环境名了,也是为了避免后面太多相似
1.2. 创建新环境并进入
conda create -n object_dection python=3.6 && conda activate object_dection
1.3. 安装 Tensorflow-gpu
因为以上通过 conda 创建了新环境也安装了 pip,所以只需要输入 pip install tensorflow-gpu==1.10.0,在下载过程中可能会中断,要多试几次。
1.4. 安装其他依赖
conda install -c anaconda protobuf
pip install pillow
pip install lxml
pip install Cython
pip install jupyter (时间较长,可能会中断)
pip install matplotlib
pip install pandas
pip install opencv-python (安装是可能会被杀毒软件误报)
资源下载
- 下载与 TF 1.10.0 对应的模型库
以下是对应关系,我这里就选择 ”tensorflow/models/tree/b07b494e3514553633b132178b4c448f994d59df“,下载完毕后放入一个盘符下即可。
TensorFlow版本 GitHub 模型存储库提交
TF v1.7 https://github.com/tensorflow/models/tree/adfd5a3aca41638aa9fb297c5095f33d64446d8f
TF v1.8 https://github.com/tensorflow/models/tree/abd504235f3c2eed891571d62f0a424e54a2dabc
TF v1.9 https://github.com/tensorflow/models/tree/d530ac540b0103caa194b4824af353f1b073553b
TF v1.10 https://github.com/tensorflow/models/tree/b07b494e3514553633b132178b4c448f994d59df
TF v1.11 https://github.com/tensorflow/models/tree/23b5b4227dfa1b23d7c21f0dfaf0951b16671f43
TF v1.12 https://github.com/tensorflow/models/tree/r1.12.0
TF v1.13 https://github.com/tensorflow/models/tree/r1.13.0
最新版本 https://github.com/tensorflow/models
- 下载 TF 的目标检测模型
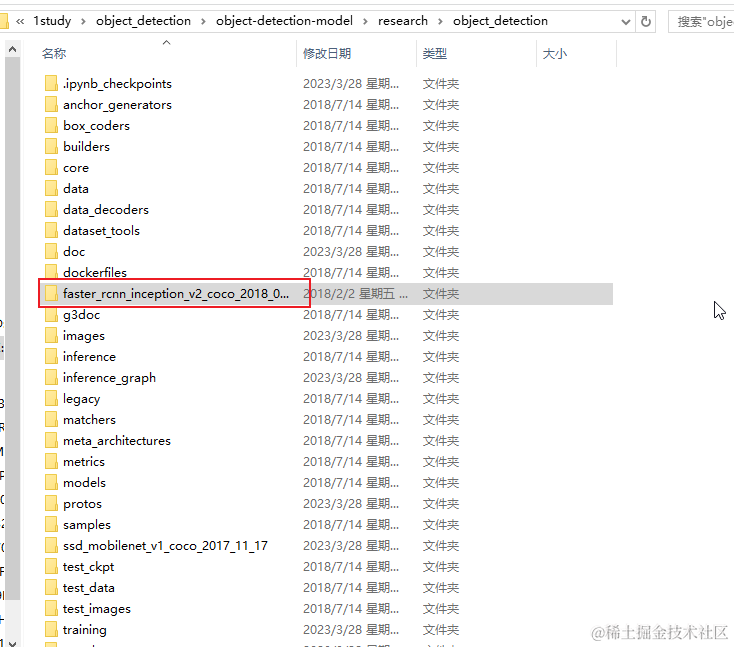
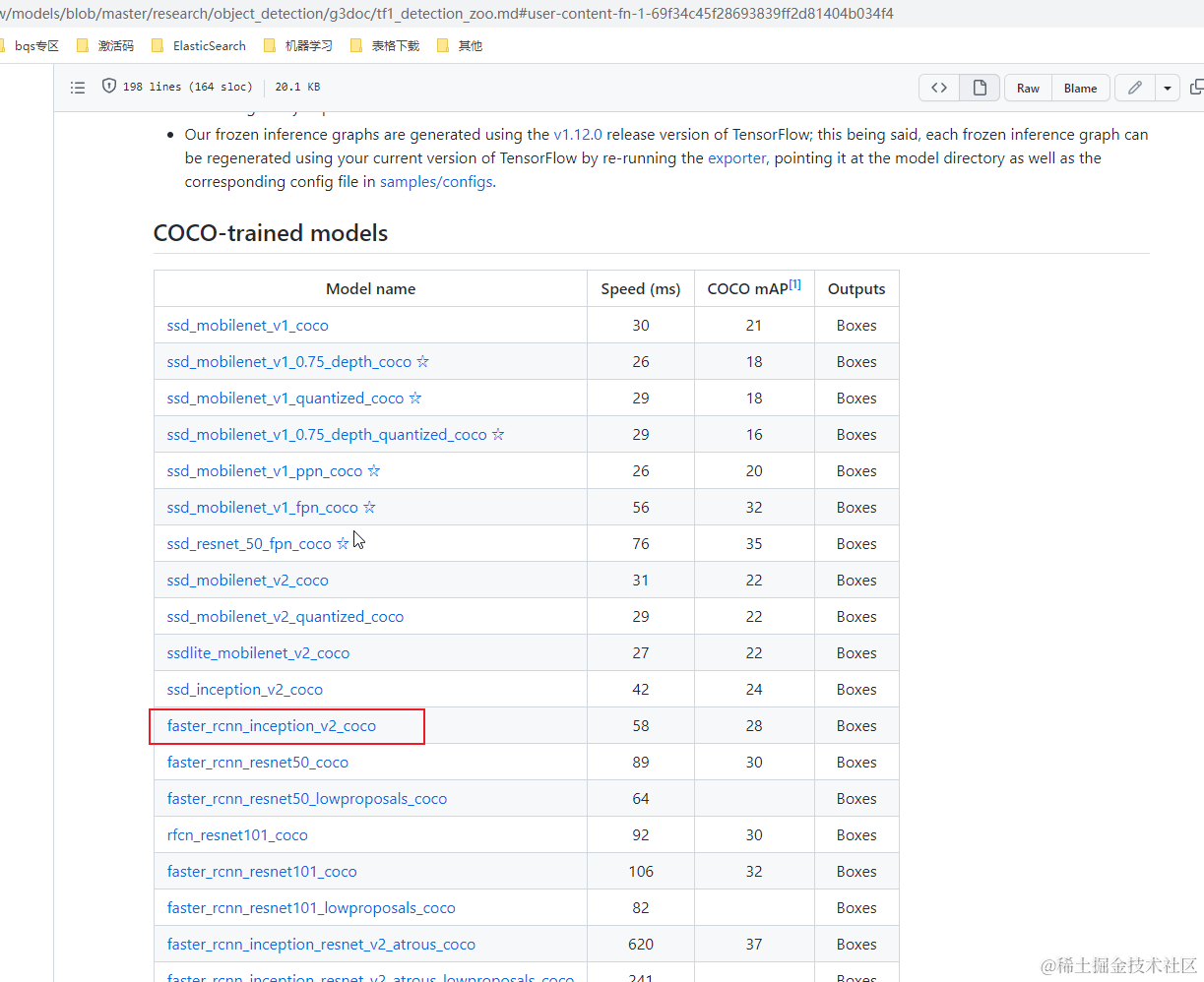
下载地址在模型库的 research/object_detection/g3doc/tf1_detection_zoo.md 里,模型选择就很有讲究了,若要在计算能力较差的设备上 (智能手机、树莓派、FPGA 等嵌入式系统中),使用 SSD-MobileNet 系列,若在工作站上训练检测可使用 RCNN 系列。这里选择的是 ”Faster-RCNN-Inception-V2“,下载完毕后放入上面模型库里的 object-detection-model\research\object_detection 下面。
- 下载国外博主提供的 demo
地址:https://github.com/EdjeElectronics/TensorFlow-Object-Detection-API-Tutorial-Train-Multiple-Objects-Windows-10#3-gather-and-label-pictures,下载后解压放入 object-detection-model\research\object_detection。
环境配置
- 配置模型的环境变量
需要将 \models, \models\research, and \models\research\slim 三个路径加入到 path 的环境变量中。
2. 编译 Protobuf 文件
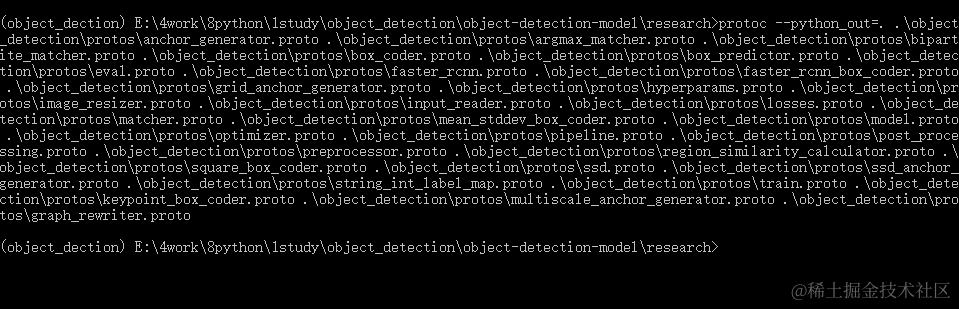
命令的目录切换到 " object-detection-model\research” 下,通过前面 conda 安装的 protobuf 将.proto 编译成 name_pb2.py 文件,输入以下命令。
protoc --python_out=. .\object_detection\protos\anchor_generator.proto .\object_detection\protos\argmax_matcher.proto .\object_detection\protos\bipartite_matcher.proto .\object_detection\protos\box_coder.proto .\object_detection\protos\box_predictor.proto .\object_detection\protos\eval.proto .\object_detection\protos\faster_rcnn.proto .\object_detection\protos\faster_rcnn_box_coder.proto .\object_detection\protos\grid_anchor_generator.proto .\object_detection\protos\hyperparams.proto .\object_detection\protos\image_resizer.proto .\object_detection\protos\input_reader.proto .\object_detection\protos\losses.proto .\object_detection\protos\matcher.proto .\object_detection\protos\mean_stddev_box_coder.proto .\object_detection\protos\model.proto .\object_detection\protos\optimizer.proto .\object_detection\protos\pipeline.proto .\object_detection\protos\post_processing.proto .\object_detection\protos\preprocessor.proto .\object_detection\protos\region_similarity_calculator.proto .\object_detection\protos\square_box_coder.proto .\object_detection\protos\ssd.proto .\object_detection\protos\ssd_anchor_generator.proto .\object_detection\protos\string_int_label_map.proto .\object_detection\protos\train.proto .\object_detection\protos\keypoint_box_coder.proto .\object_detection\protos\multiscale_anchor_generator.proto .\object_detection\protos\graph_rewriter.proto
- 安装 Object-Detection
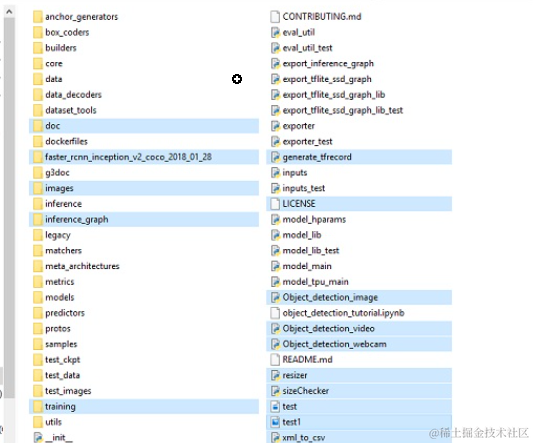
继续在 “object-detection-model\research” 目录下,分别运行下面两个命令,并且会多出几个文件夹。
python setup.py build
python setup.py install
验证与运行
为了验证 Object Detection 是否安装成功,也为了运行目标检测官方案例。通过前面安装的 jupyter,执行以下命令,前提是命令目录需要切换到 “object-detection-model\research\object_detection”。
jupyter notebook object_detection_tutorial.ipynb
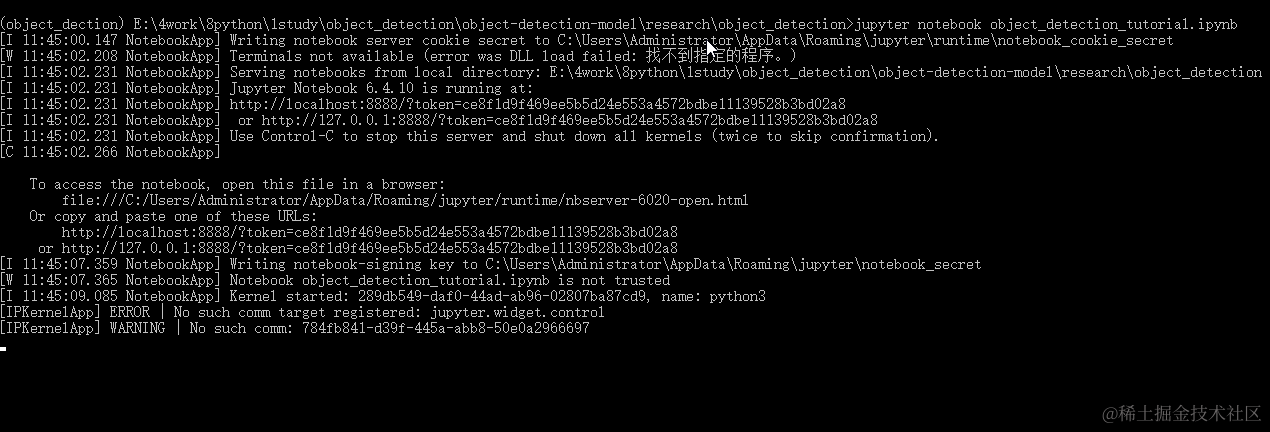
运行后默认会打开浏览器,然后打开脚本,并能一次一步地浏览代码部分。可以通过单击上面工具栏中的 “运行” 按钮逐步浏览每个部分。当小节旁边的 “In [] 文本中的数字出现时,该节将完成运行 (例如 “In [1]”)。(注意:其中有一步是从 GitHub 上下载 ssd_mobilenet_v1 模型,大约 74M,需要多等一会,程序是在执行的,并不是死机或出错。静等 In [] 中的 * 变成数字)。但是当我在点击每段代码时,就有以下几个报错。
- Could not find ‘cudart64_90.dll’. TensorFlow requires that this DLL be installed in a directory that
原因:本地电脑没有 CUDA 的 cudart64_90.dll 文件,当安装 CUDA 后还报错,原来是启动窗口没有关闭,命令找的是旧环境地址
方法:重启打开该 conda 环境,再重新启动 jupyter 命令。
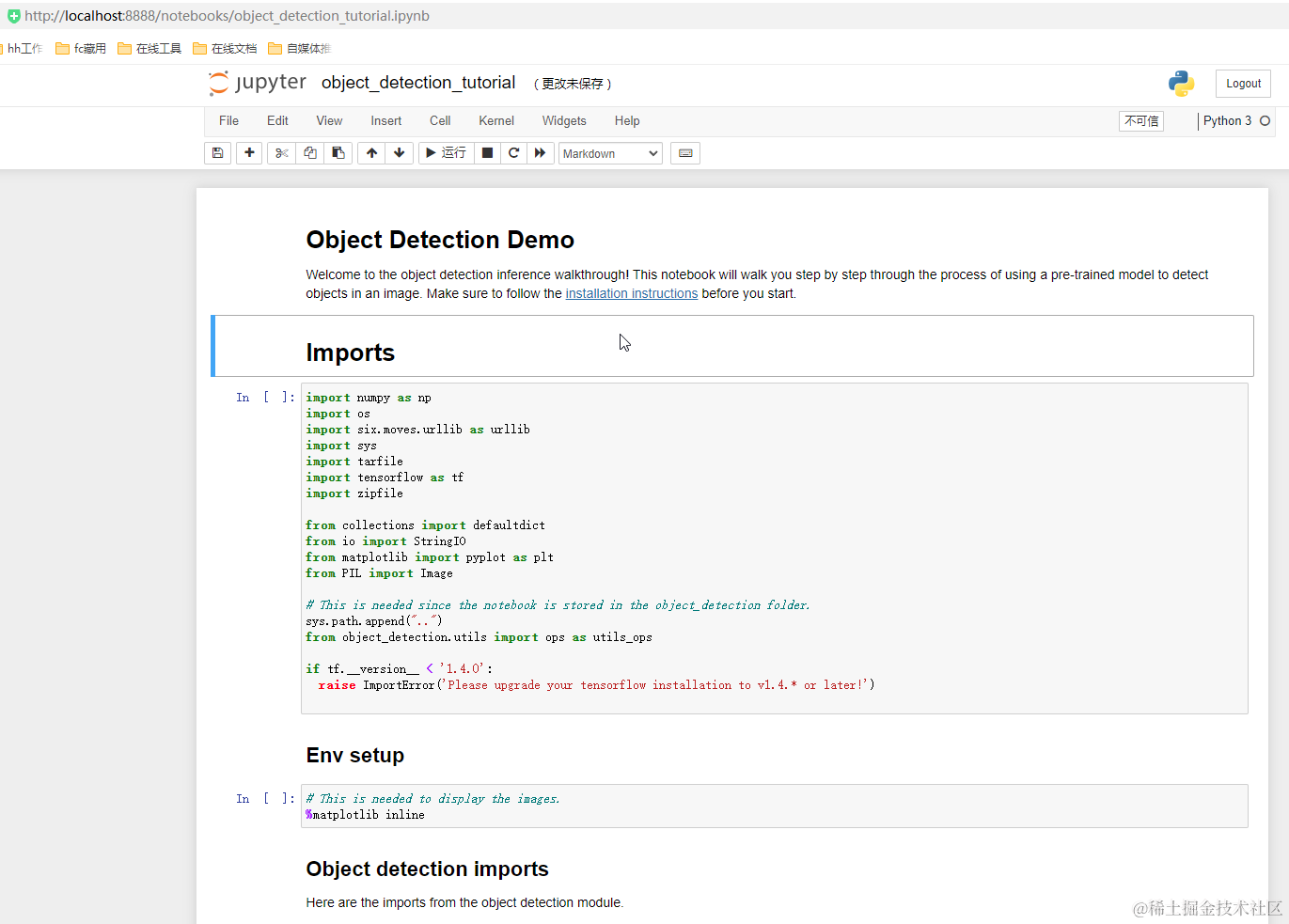
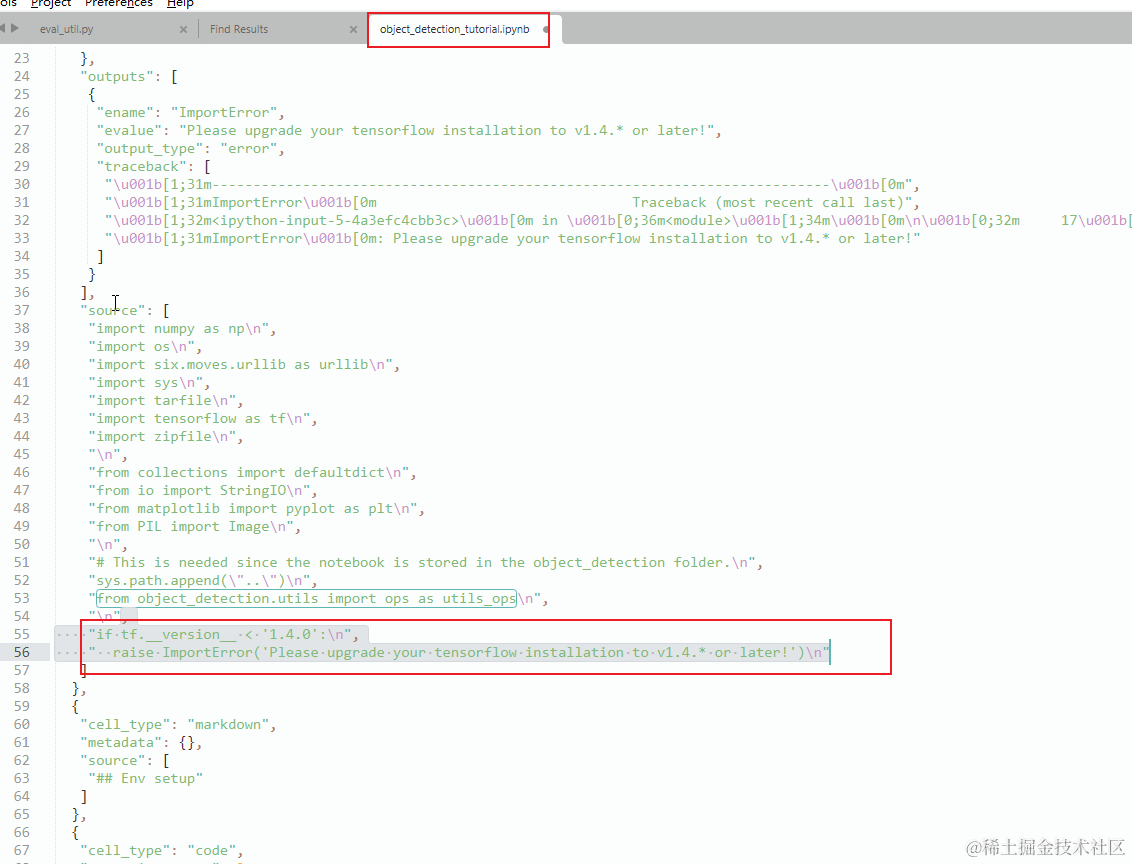
- Please upgrade your tensorflow installation to v1.4.* or later
原因:反复确认过在该环境下安装的是 TF1.10.0,目前不知道什么原因,以下方法虽然解决了,但是第一段代码运行还有有一些异常信息。
方法:打开 object_detection_tutorial.ipynb 文件,找到 “source”, 删除或注释掉以下代码。
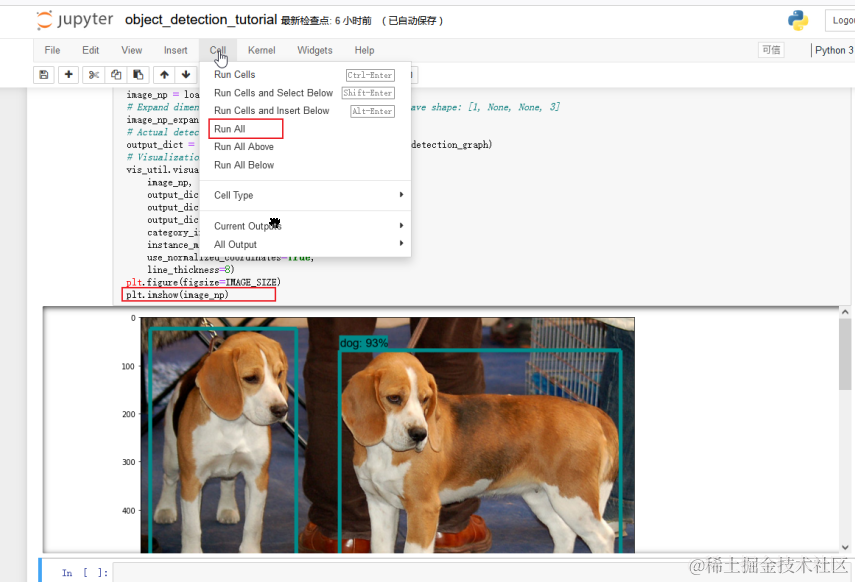
- 目标检测的图片不出来。
原因:目前不知道原因,没有错误提示,我也更换过浏览器。
方法:代码运行选择了 run all,在火狐浏览器里就出来了。
- 最后如果需要上面的下载代码,可以留言,到时候我再贴出来。




![Unity报错:[SteamVR] Not Initialized (109)的解决方法](https://img-blog.csdnimg.cn/direct/2b6f9f608eb24c6d8a1cfb60206cc9ae.png)