目录
一、模糊原理
二、模糊的相关处理方法:
1、均值滤波(归一化盒子滤波)
2、高斯滤波(正态分布的形状)
3、中值模糊
4、双边模糊算法(美容软件)
5、相关代码:
6、几种模糊算法的比较:
一、模糊原理
(1)Smooth/Blur 是图像处理中最简单和常用的操作之一
(2)使用该操作的原因之一就为了给图像预处理时候减低噪声(消除数字噪声)
指图像中不该出现的外来像素,通常由电子干扰产生。看起来就像图像被弄脏了,布满一些细小的糙点。
(3)使用Smooth/Blur操作其背后是数学的卷积计算
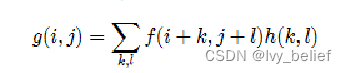
(4)通常这些卷积算子计算都是线性操作,所以又叫线性滤波

假设有6x6的图像像素点矩阵。(均值滤波的过程)
卷积过程:6x6上面是个3x3的窗口,从左向右,从上向下移动,黄色的每个像个像素点值之和取平均值赋给中心红色像素作为它卷积处理之后新的像素值。每次移动一个像素格。
二、模糊的相关处理方法:
1、均值滤波(归一化盒子滤波)
(1)公式:卷积和系数都是1

对应的图形大概是:没有高的也没有低的

(2)相关API:
blur(Mat src, Mat dst, Size(xradius, yradius), Point(-1,-1));

Filter2D也可以做模糊,自己定义一个kenel赋值进去。
(3)一般模糊用3*3模糊就行,主要控制x、y的值,要是x方向的模糊多一些,就加大数值,好像一个鬼影一样。

2、高斯滤波(正态分布的形状)
(1)公式:权重不一样

对应的图形大概是:

(2)相关API:
- GaussianBlur(Mat src, Mat dst, Size(11, 11), sigmax, sigmay);
其中Size(x, y), x, y 必须是正数而且是奇数
(3)效果:
看着高斯模糊比均值还要清晰一些。
高斯基于权重模糊,均值滤波基于均值模糊;

3、中值模糊
(1)中值滤波:统计排序滤器
(2)中值滤波对椒盐噪声有很好的抑制作用

(3)相关API:
medianBlur(Mat src, Mat dest, ksize)
备注:中值模糊的ksize大小必须是大于1而且必须是奇数。
(4)功效:比如一张图片有点点,人脸有斑点,就可以很好去掉这些斑点。(椒盐噪声)

4、双边模糊算法(美容软件)
(1)基于高斯双边模糊;
(2)相关API:
bilateralFilter(src, dest, d=15, 150, 3);
备注:
1)15 –计算的半径,半径之内的像数都会被纳入计算,如果提供-1 则根据sigma space参数取值
2)150 – sigma color 决定多少差值之内的像素会被计算
3)3 – sigma space 如果d的值大于0则声明无效,否则根据它来计算d值
(3)功效:
双边模糊:边缘信息更多保留,轮廓更加明显,相当于加了滤镜、磨皮;
高斯模糊:整个图片都模糊了;

与filter2D比较,效果更加好,有美颜的效果;

5、相关代码:
(1)均值滤波、高斯模糊的接口例子
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;int main(int argc, char** argv) {Mat src, dst;src = imread("D:/vcprojects/images/test.png");if (!src.data) {printf("could not load image...\n");return -1;}char input_title[] = "input image";char output_title[] = "blur image";namedWindow(input_title, CV_WINDOW_AUTOSIZE);namedWindow(output_title, CV_WINDOW_AUTOSIZE);imshow(input_title, src);blur(src, dst, Size(11, 11), Point(-1, -1));imshow(output_title, dst);Mat gblur;GaussianBlur(src, gblur, Size(11, 11), 11, 11);imshow("gaussian blur", gblur);waitKey(0);return 0;
}(2)中值滤波、双边模糊、高斯模糊、filter2D几个接口的应用。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;int main(int argc, char** argv) {Mat src, dst;src = imread("D:/vcprojects/images/cvtest.png");if (!src.data) {printf("could not load image...\n");return -1;}namedWindow("input image", CV_WINDOW_AUTOSIZE);imshow("input image", src);//medianBlur(src, dst, 3);bilateralFilter(src, dst, 15, 100, 5);namedWindow("BiBlur Filter Result", CV_WINDOW_AUTOSIZE);imshow("BiBlur Filter Result", dst);Mat resultImg;Mat kernel = (Mat_<int>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);filter2D(dst, resultImg, -1, kernel, Point(-1, -1), 0);imshow("Final Result", resultImg);waitKey(0);return 0;}6、几种模糊算法的比较:
(1)均值模糊无法克服边缘像素信息丢失缺陷。原因是均值滤波是基于平均权重
(2)高斯模糊部分克服了该缺陷,但是无法完全避免,因为没有考虑像素值的不同
(3)高斯双边模糊 – 是边缘保留的滤波方法,避免了边缘信息丢失,保留了图像轮廓不变(美颜相机的算法)
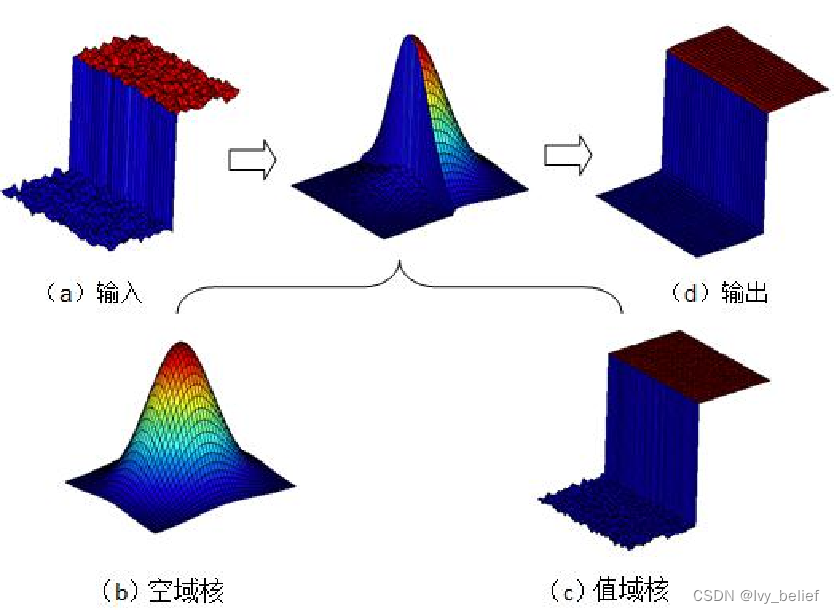
这个图讲解:输入一个图,输出一个图,中间的是卷积核,分为:空域核和值域核;
空域核指的是:在空间来说,3*3、5*5都有自己的权重;
值域核:指像素集来说,对于像素集在一定的范围内,就模糊输出,2个图的差异,边缘还在保留的。