基础实验
1.复现四旋翼Simulink仿真,分析控制作用在obxb轴和obyb轴的解耦。
2.对系统进行扫频以绘制Bode图,分析闭环位置控制系统稳定裕度。
3.完成硬件在环仿真。
本实验对应demo文件对于RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightControl\e6-PositionCtrl\e6.1;
对于RflySim v3.0及以上版本地址为:*\PX4PSP\RflySimAPIs\5.RflySimFlyCtrl\1.BasicExps\e6-PositionCtrl\e6.1。
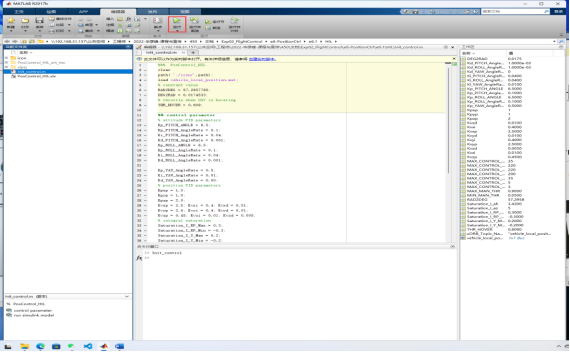
Simulink仿真——通道解耦:打开”e6-PositionCtrl\PID-Config\e6.1\Sim\Init_control.m 文件。如图,点击运行,进行参数初始化。此时,PosControl_Sim.slx将会自动打开,如下图。
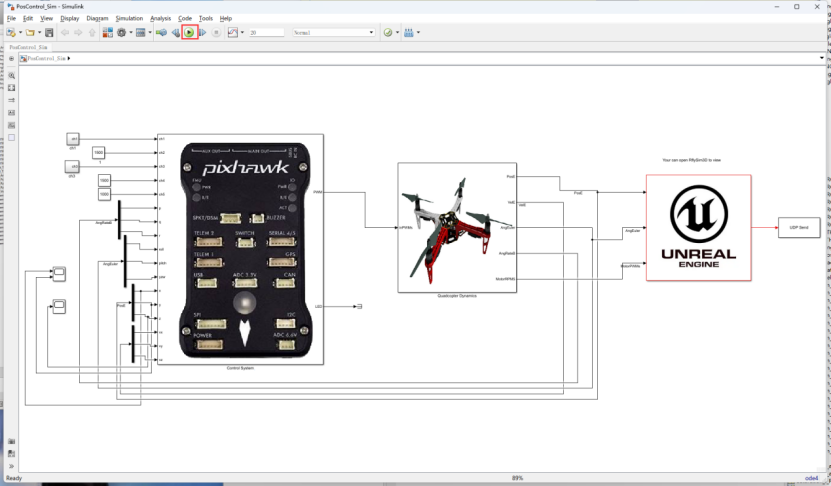
打开Rflysim3D.exe,然后点击Simulink“Run”按钮开始仿真。此时可以在UE5中观察多旋翼的状态,如下图可以看到多旋翼先上升到空中,然后向OeOy轴方向飞行,最后悬停。

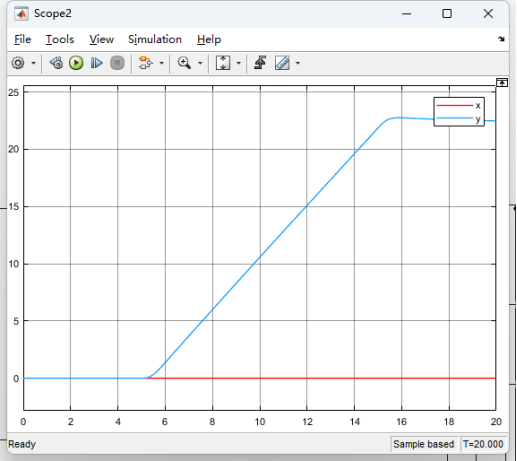
通道解耦分析:在PosControl_Sim.slx文件中双击Scope2可以观测四旋翼的位置信息,如下图所示。

稳定裕度:打开文件“e6-PositionCtrl\PID-Config\e6.1\tune\Init_control.m”文件初始化参数,”PosControl_tune.slx”将会自动打开。如下图,双击打开上述文件的”Control System”,进入子模块,双击子模块中的”position_control”模块,进入目标模块,将期望x通道输入线设为”Open-loop Input”,x通道的实际输出设置为”Open-loop Output”。

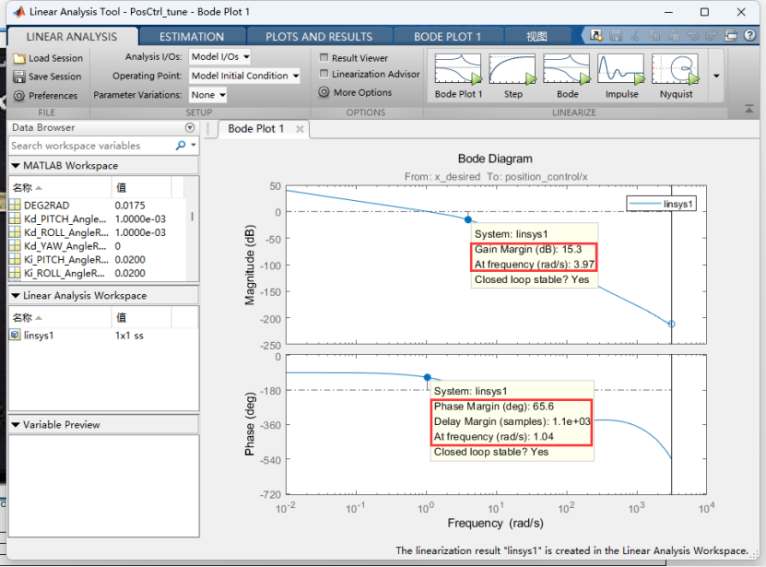
选择Simulink上面菜单中的”Analysis”,在下拉菜单中选择”Control Design”,选择”Linear Analysis”。在弹出的窗口选择”LINEAR ANALYSIS”,点击Bode得到Bode图。

在曲线中点击鼠标右键,选择”Characteristics”-“All Stability Margins”,可得到幅值裕度为15.3dB,此时的频率为3.97rad/s;相位裕度为65.5,频率为1.04 rad/s。
硬件在环仿真:运行文件” e6-PositionCtrl\PID-Config\e6.1\HIL\Init_control.m”进行参数初始化,”PosControl_HIL.slx” 将会自动打开,如下图所示。
将遥控器与遥控器接收器对码完成并在飞控中插入SD卡后,如图将遥控器接收机和飞控连接好。

注意:电源线接线顺序从上到下依次为黑红黄
代码编译及下载:将硬件在环仿真模型编译并下载文件到Pixhawk 自驾仪中。这样就可以在Pixhawk自驾仪中运行我们自己设计的位置控制程序。
将飞控连接好后,通过数据线连接到PC。然后进入”PosControl_HIL.slx”界面,进行如下图操作。

烧录成功显示如下图所示:

上传成功后,在QGC中校准遥控器并设置飞行模式,完成后双击打开"*\桌面\RflyTools\HITLRun.lnk"或"*\PX4PSP\RflySimAPIs\HITLRun.bat"文件,在弹出的CMD对话框中输入插入的飞控Com端口号,即可自动启动RflySim3D、CopterSim、QGroundControl软件,等待CopterSim的状态框中显示:PX4: GPS 3D fixed & EKF initialization finished。

遥控器的设置如下图,通过控制不同的通道即可在RflySim3D中观察到无人机的飞行姿态,完成硬件在环仿真。

通过CH5解锁之后,在RflySim3D中即可看到飞机正常起飞,通过Step 12中CH1~CH4调整飞机姿态和高度。
参考文献:
[1] 全权,杜光勋,赵峙尧,戴训华,任锦瑞,邓恒译.多旋翼飞行器设计与控制[M],电子工业出版社,2018.
[2] 全权,戴训华,王帅.多旋翼飞行器设计与控制实践[M],电子工业出版社,2020.