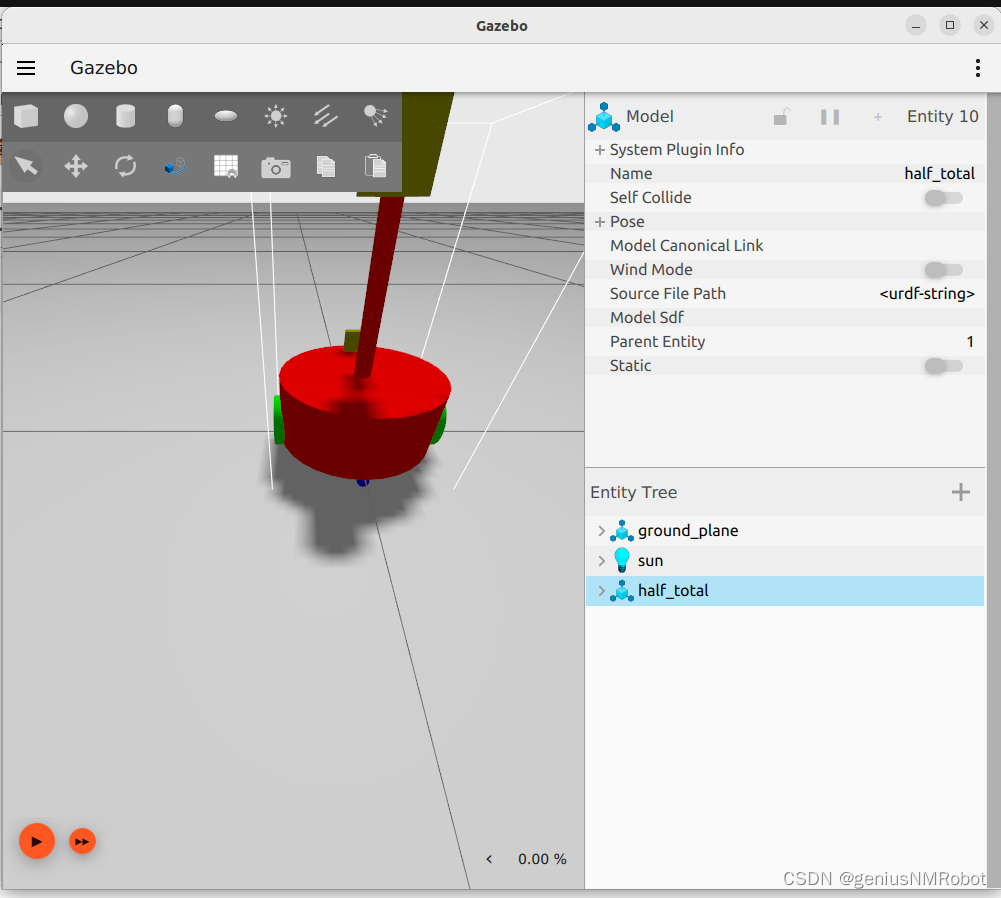
在gazebo当中不用再设置颜色了,因为完全可以使用urdf的设置
<robot name="base" xmlns:xacro="http://wiki.ros.org/wiki/xacro"><xacro:property name="PI" value="3.1415926"/><!--定义一个变量PI,后边用来调用的--><xacro:property name="base_footprint_radius" value="0.001"/><xacro:property name="base_radius" value="0.1"/><xacro:property name="base_length" value="0.08"/><xacro:property name="ground_clearance" value="0.015"/><xacro:property name="base_mass" value="0.5"/><link name="base_footprint"><visual><geometry><sphere radius="${base_footprint_radius}"/></geometry></visual></link><link name="base"><visual><geometry><cylinder radius="${base_radius}" length="${base_length}"/></geometry><origin xyz="0 0 0" rpy="0 0 0"/><material name="red"><color rgba="1 0 0.0 1"/></material></visual><collision><geometry><cylinder radius="${base_radius}" length="${base_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/></collision><xacro:cylinder_inertial m="${base_mass}" r="${base_radius}" h="${base_length}"/></link><joint name="base2base_footprint" type="fixed"><parent link="base_footprint"/><child link="base"/><origin xyz="0 0 ${ground_clearance+base_length/2}"/></joint><!--<gazebo reference="base"><material>Gazebo/Blue</material></gazebo>--><xacro:property name="wheel_radius" value="0.0325"/><xacro:property name="wheel_length" value="0.015"/><xacro:property name="wheel_m" value="0.05"/><xacro:macro name="add_wheel" params="name flag"><link name="${name}_wheel"><visual><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI/2} 0 0"/><material name="green"><color rgba="0 1 0.0 1"/></material></visual><collision><geometry><cylinder radius="${wheel_radius}" length="${wheel_length}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="${PI/2} 0.0 0.0"/></collision><xacro:cylinder_inertial m="${wheel_m}" r="${wheel_radius}" h="${wheel_length}"/></link><joint name="${name}_wheel2base" type="continuous"><parent link="base"/><child link="${name}_wheel"/><origin xyz="0 ${flag*base_radius} ${-(ground_clearance+base_length/2-wheel_radius)}"/><axis xyz="0 1 0"/></joint><!--<gazebo reference="${name}_wheel"><material>Gazebo/Blue</material></gazebo>--></xacro:macro><xacro:add_wheel name="left" flag="1"/><xacro:add_wheel name="right" flag="-1"/><xacro:property name="holder_wheel_radius" value="0.0075"/><xacro:property name="holder_wheel_m" value="0.03"/><xacro:macro name="add_holder_wheel" params="name flag"><link name="${name}_wheel"><visual><geometry><sphere radius="${holder_wheel_radius}"/></geometry><origin xyz="0 0 0" rpy="0.0 0.0 0.0"/><material name="blue"><color rgba="0 0 1.0 1"/></material></visual><collision><geometry><sphere radius="${holder_wheel_radius}"/></geometry><origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/></collision><xacro:sphere_inertial m="${holder_wheel_m}" r="${holder_wheel_radius}"/></link><joint name="${name}_wheel2base" type="continuous"><parent link="base"/><child link="${name}_wheel"/><origin xyz="${flag*(base_radius-holder_wheel_radius)} 0 ${-(base_length/2+ground_clearance/2)}"/><axis xyz="1 1 1"/></joint>
<!-- <gazebo reference="${name}_wheel"><material>Gazebo/Blue</material></gazebo>
--></xacro:macro><xacro:add_holder_wheel name="front" flag="1"/><xacro:add_holder_wheel name="back" flag="-1"/>
</robot>这个代码完全使用了urdf自己的颜色rgba,没有使用<gazebo>内的<material>标签,事实证明即使添加一个<material>标签,也不会有用,所以这样设计更加方便。算是进化了
请诸位放心,一切都在掌控之中哈哈